
牵拉人工肌腱式双足机器人矢状面行走控制.docx

18****28


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

牵拉人工肌腱式双足机器人矢状面行走控制.docx
牵拉人工肌腱式双足机器人矢状面行走控制目录一、内容概括................................................2二、背景知识................................................31.双足机器人概述........................................42.人工肌腱技术介绍......................................53.矢状面行走简述................

微型双足壁面行走机器人机构.pdf
一种微型双足壁面行走机器人机构,第二轴与机器人机架以第二转动副、第四转动副连接;第三齿轮通过第二离合器与第三轴连接;第三轴与机器人机架以第三转动副连接,并与第二行走吸附足以第二螺旋副连接;第一行走吸附足与机器人机架以第一圆柱副连接。本发明与现有技术相比,具有以下优点及突出性效果:该机器人机构通过行走吸附足与离合器之间的配合,可实现定轴轮系与行星轮系之间的变换,从而保证了工作状态时的稳定与较大的负载能力,且行走方式简单、驱动少。同时结构紧凑、尺寸小、成本低、重量轻、控制简单,负载力大,具有行走、越障等功能。
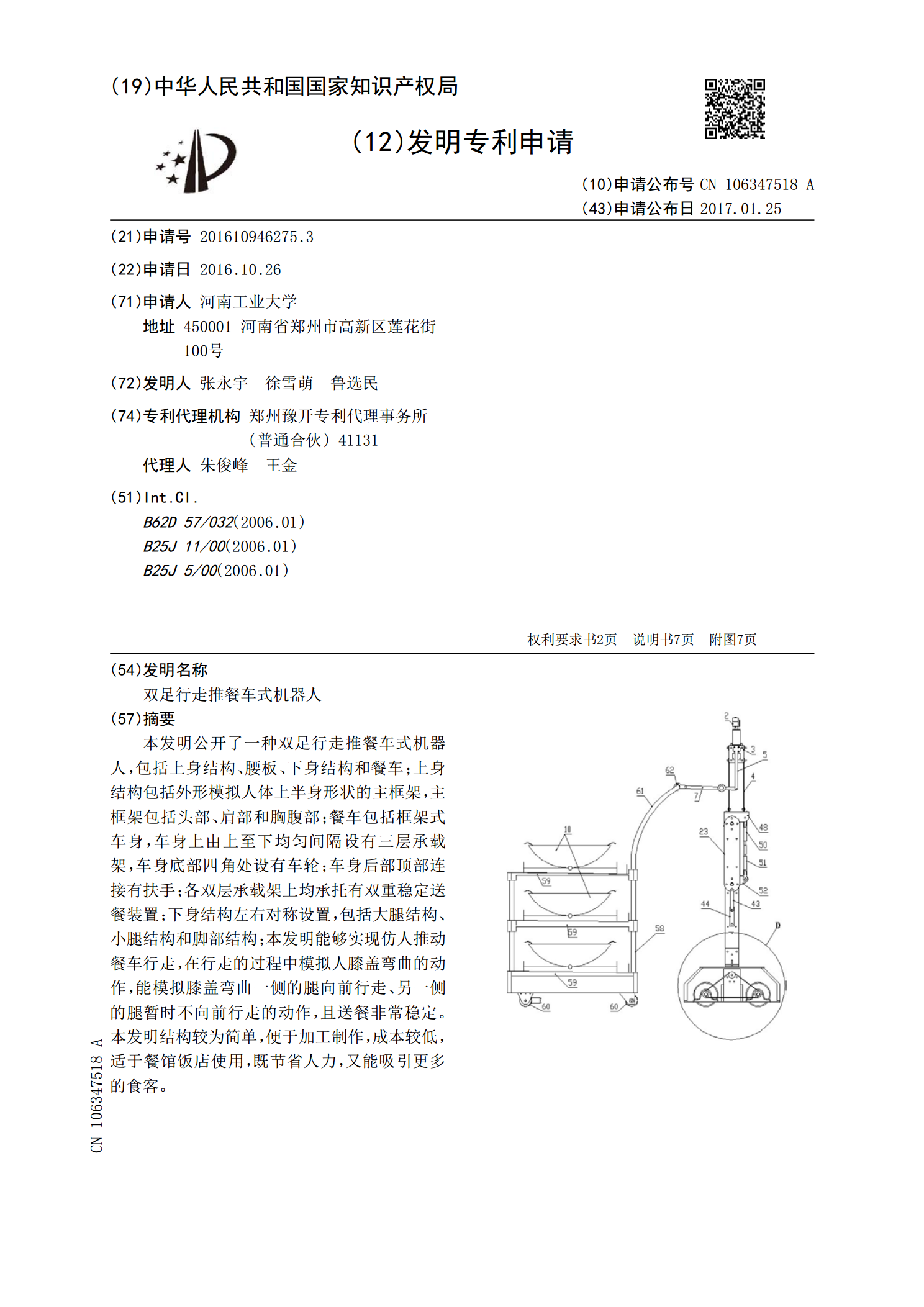
双足行走推餐车式机器人.pdf
本发明公开了一种双足行走推餐车式机器人,包括上身结构、腰板、下身结构和餐车;上身结构包括外形模拟人体上半身形状的主框架,主框架包括头部、肩部和胸腹部;餐车包括框架式车身,车身上由上至下均匀间隔设有三层承载架,车身底部四角处设有车轮;车身后部顶部连接有扶手;各双层承载架上均承托有双重稳定送餐装置;下身结构左右对称设置,包括大腿结构、小腿结构和脚部结构;本发明能够实现仿人推动餐车行走,在行走的过程中模拟人膝盖弯曲的动作,能模拟膝盖弯曲一侧的腿向前行走、另一侧的腿暂时不向前行走的动作,且送餐非常稳定。本发明结构

双足行走机器人平衡控制译文.docx
外文资料:Robots1.IntroductionNowadays,theapplicationsofmachinesandrobotstoassisthumaninperformingtheirtaskshasbecomeincreasinglyextensive.Inindustrialapplications,theuseofroboticssystemhasreachedthelevelwhichsurpasseshumanabilityintermsofspeedandaccuracy.Onth

并联五连杆点足式双足机器人稳定行走控制方法.docx
并联五连杆点足式双足机器人稳定行走控制方法并联五连杆点足式双足机器人稳定行走控制方法摘要:随着机器人技术的不断发展,双足机器人作为一种重要的机器人形态,具有广泛的应用前景。然而,双足机器人的稳定行走仍然是一个具有挑战的问题。本文提出了一种并联五连杆点足式的双足机器人稳定行走控制方法。该方法通过对双足机器人的运动进行建模,并利用控制算法实现稳定的行走。通过实验验证,该方法能够实现双足机器人的稳定行走,具有较好的鲁棒性和稳定性。关键词:双足机器人;并联五连杆;点足式;稳定行走;控制方法1.引言双足机器人作为仿