
一种具有新型行走机构的壁面机器人.pdf

玉环****找我

1/8

2/8

3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有新型行走机构的壁面机器人.pdf
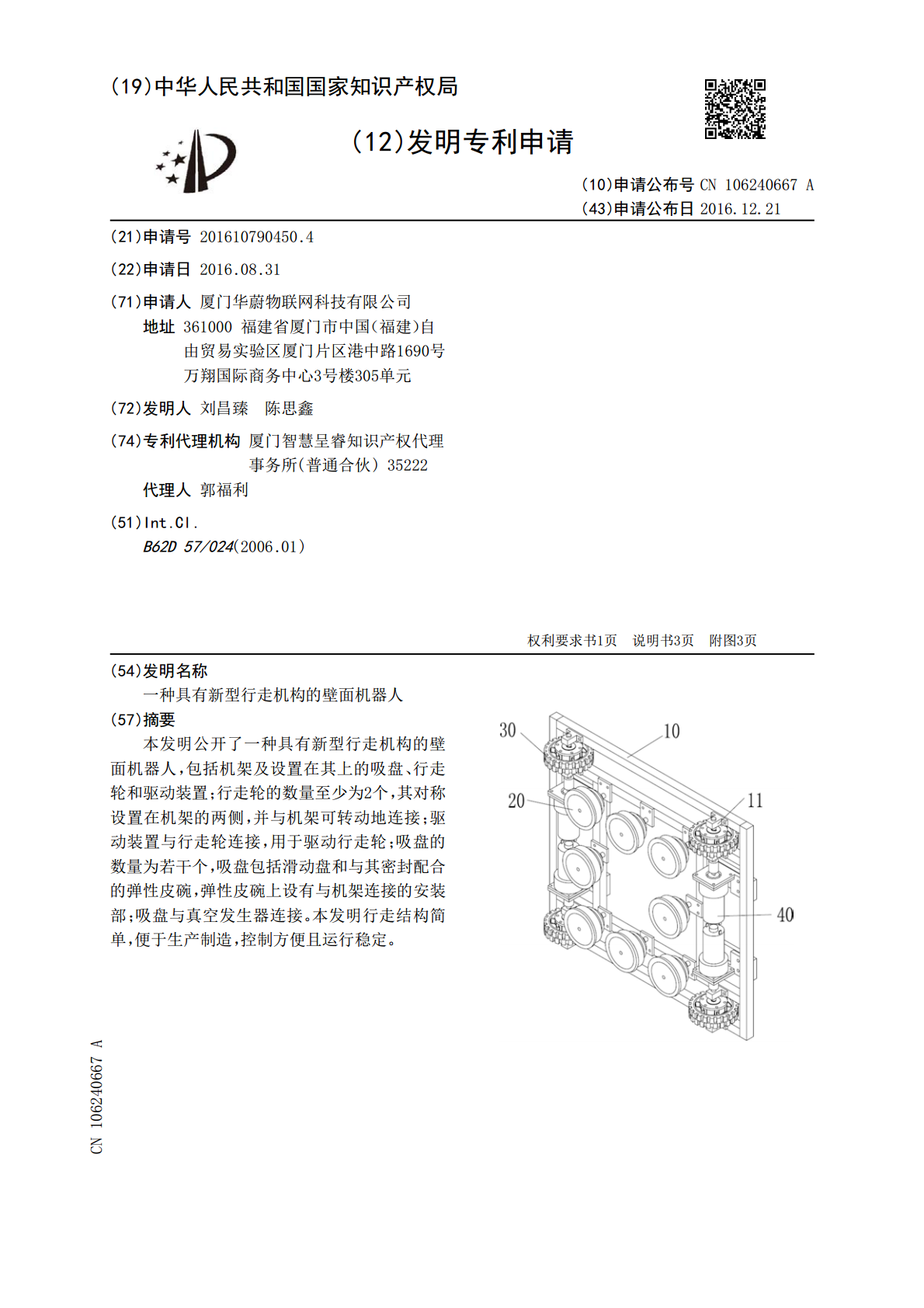
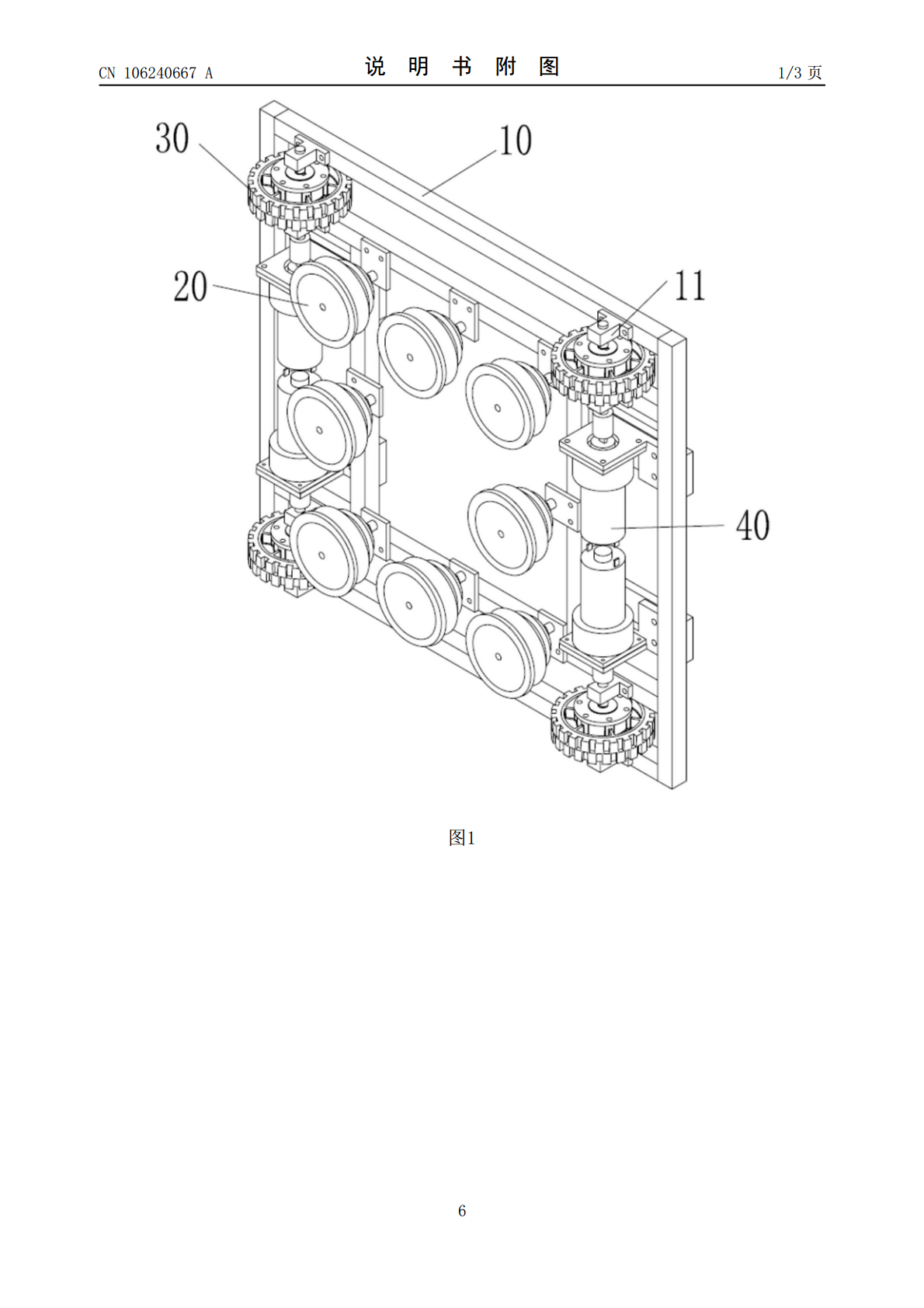
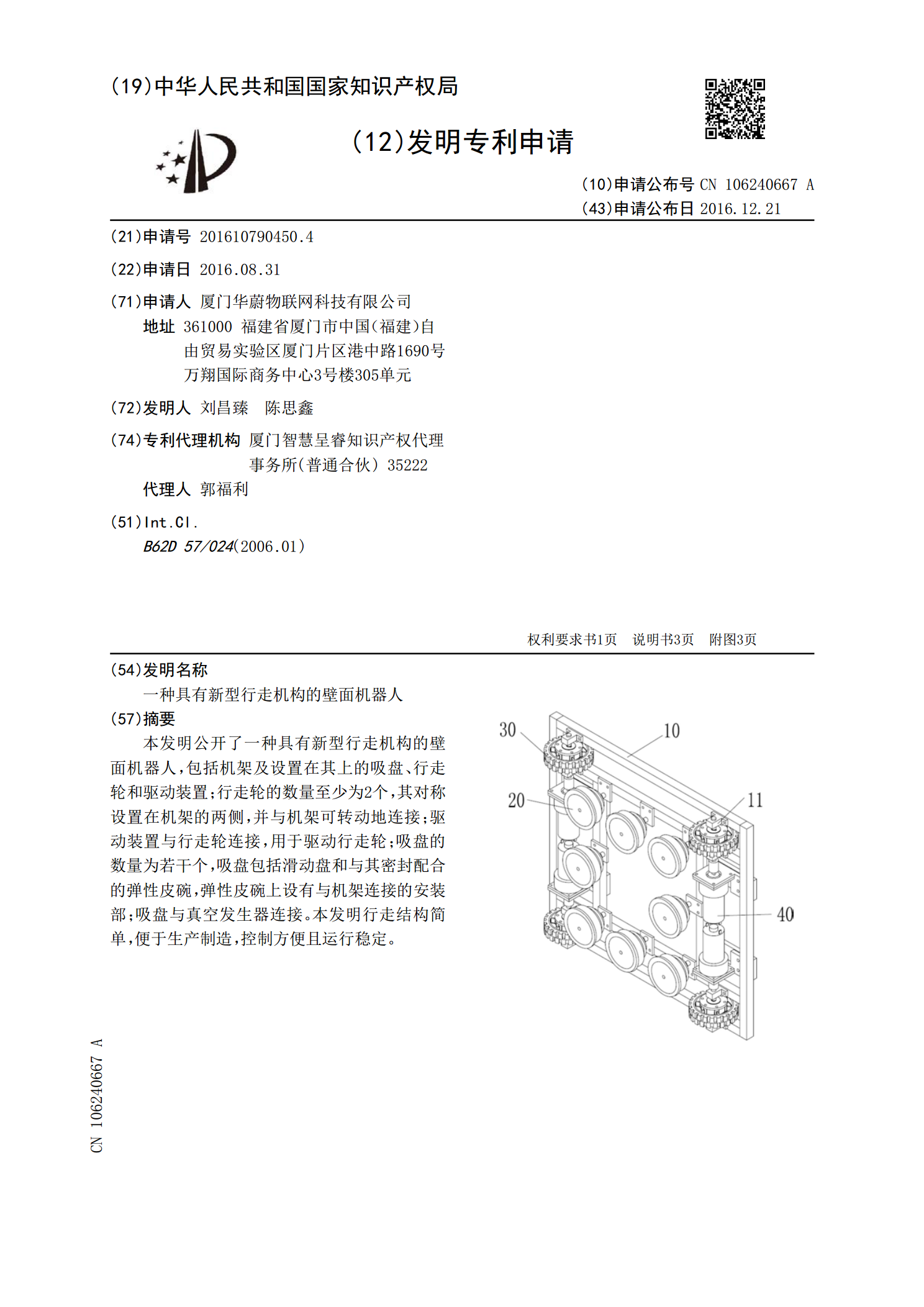
本发明公开了一种具有新型行走机构的壁面机器人,包括机架及设置在其上的吸盘、行走轮和驱动装置;行走轮的数量至少为2个,其对称设置在机架的两侧,并与机架可转动地连接;驱动装置与行走轮连接,用于驱动行走轮;吸盘的数量为若干个,吸盘包括滑动盘和与其密封配合的弹性皮碗,弹性皮碗上设有与机架连接的安装部;吸盘与真空发生器连接。本发明行走结构简单,便于生产制造,控制方便且运行稳定。

一种具有壁面转换功能的越障爬壁机器人.pdf
本发明公开了一种具有壁面转换功能的越障爬壁机器人,包括两个单体爬壁机器人和俯仰偏摆机构,两个单体爬壁机器人之间通过中间的俯仰偏摆机构连接,所述单体爬壁机器人包括无刷电机、电机底座、电机支撑架、离心风页、机器人壳体、运动机构、密封垫。无刷电机带动离心风页转动将机器人壳体内部的空气抽出,使机器人壳体内部形成负压,从而使机器人吸附在墙壁上。俯仰偏摆机构可以辅助机器人跨越障碍和转向。本发明双体爬壁机器人能够在墙壁表面灵活的移动,并且可以跨越墙壁上的沟槽和大的凸起障碍、完成在相邻壁面之间的转换,有效提高了爬壁机器人

具有良好壁面过渡能力的新型爬壁机器人动力学建模与分析.docx
具有良好壁面过渡能力的新型爬壁机器人动力学建模与分析摘要本文研究了具有良好壁面过渡能力的新型爬壁机器人的动力学建模与分析。首先介绍了爬壁机器人的研究背景和意义,以及目前存在的挑战和问题。然后,根据机器人的结构和运动原理,对其进行了动力学建模。通过采用拉格朗日动力学方法,建立了机器人的运动学和动力学方程。在此基础上,对机器人的运动特性进行了分析和优化。最后,通过实验验证了所提出的动力学模型的准确性和可靠性。研究结果表明,新型爬壁机器人具有良好的壁面过渡能力,能够在复杂的壁面上实现稳定的运动。这对于机器人在危

一种爬壁机器人行走机构.pdf
本发明公开了一种爬壁机器人行走机构,包括行走机构和驱动行走机构运动的行星齿轮机构,所述行走机构及行星齿轮机构设置在支架上;行星齿轮机构包括外齿圈、太阳齿轮、行星齿轮、行星架以及电机;所述外齿圈固结在支架内;太阳齿轮为驱动轮,与电机连接;所述行星齿轮有三个,分别安装在行星架的三个轴上;行走机构包括五个吸附装置,其中三个吸附装置通过连接杆及脚架均匀设置在支架的外围;另外两个吸附装置通过连杆安装在行星架的两个轴的通孔内;当爬壁机器人行走时安装在支架上的三个吸附装置与安装在行星架上的两个吸附装置相互交替吸附。本行
一种具有壁面过渡能力的履带式磁吸附爬壁机器人.pdf
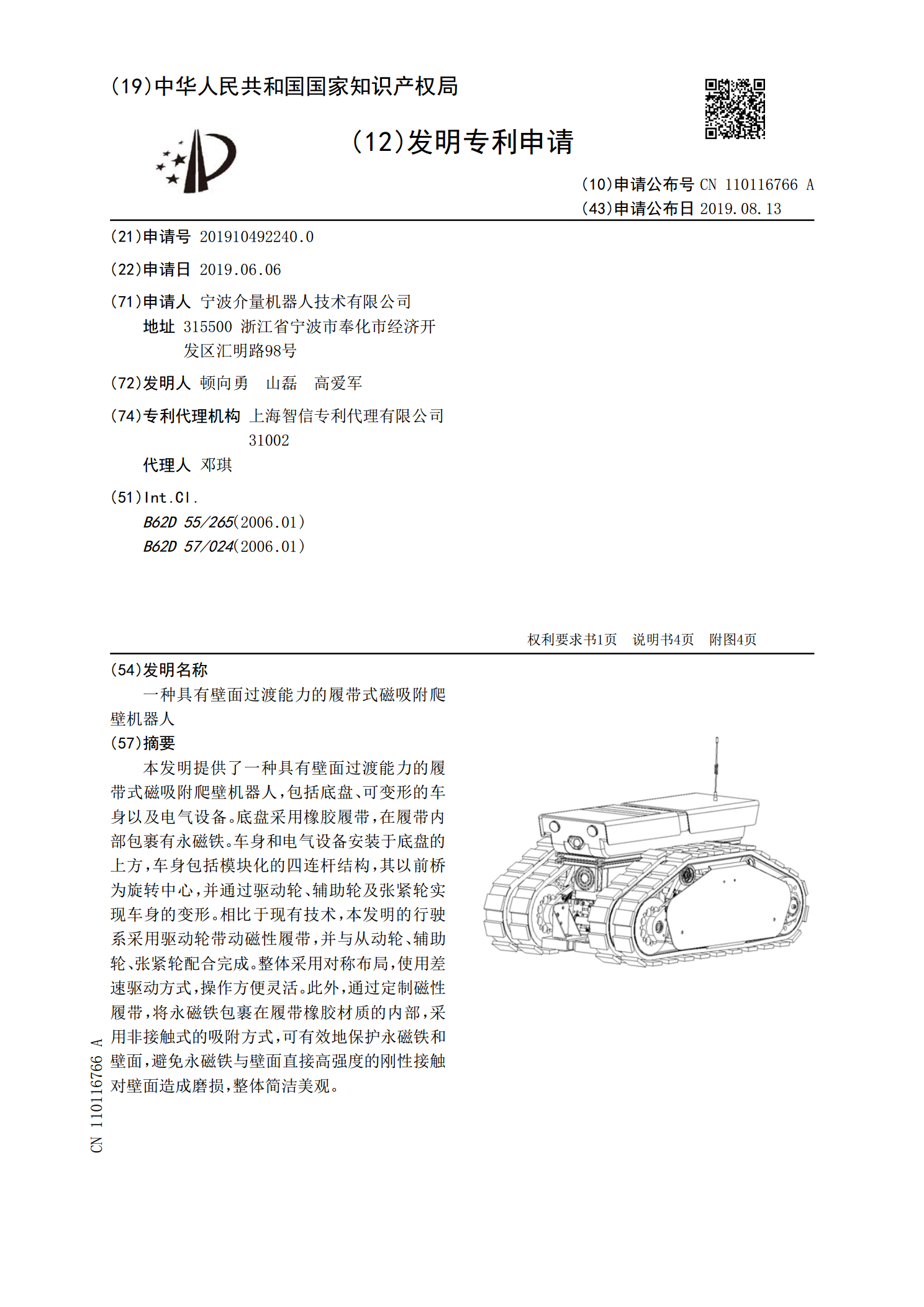
本发明提供了一种具有壁面过渡能力的履带式磁吸附爬壁机器人,包括底盘、可变形的车身以及电气设备。底盘采用橡胶履带,在履带内部包裹有永磁铁。车身和电气设备安装于底盘的上方,车身包括模块化的四连杆结构,其以前桥为旋转中心,并通过驱动轮、辅助轮及张紧轮实现车身的变形。相比于现有技术,本发明的行驶系采用驱动轮带动磁性履带,并与从动轮、辅助轮、张紧轮配合完成。整体采用对称布局,使用差速驱动方式,操作方便灵活。此外,通过定制磁性履带,将永磁铁包裹在履带橡胶材质的内部,采用非接触式的吸附方式,可有效地保护永磁铁和壁面,避