
用于通过车辆转向装置使车辆转向的方法.pdf

努力****骞北


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于通过车辆转向装置使车辆转向的方法.pdf
本发明涉及一种用于借助一个可由驾驶员操纵的转向操纵装置(2)使车辆转向的方法。为此,车辆转向装置(1)具有机电调节机组(3,4),用于控制至少一根可转向车轴(8)的车轮对位于车体(5)右侧和左侧的可转向车轮(6,7)。一个中央控制单元(10)将转向操纵装置(2)的额定预设值与ESP预设值和可转向车轮(6,7)的车轮位置实际值进行比较,并且使可转向车轮(6,7)的转向止挡(11,12)的电子预设值与车辆(15)的运行状态匹配。
用于车辆的转向系统以及车辆的转向方法.pdf
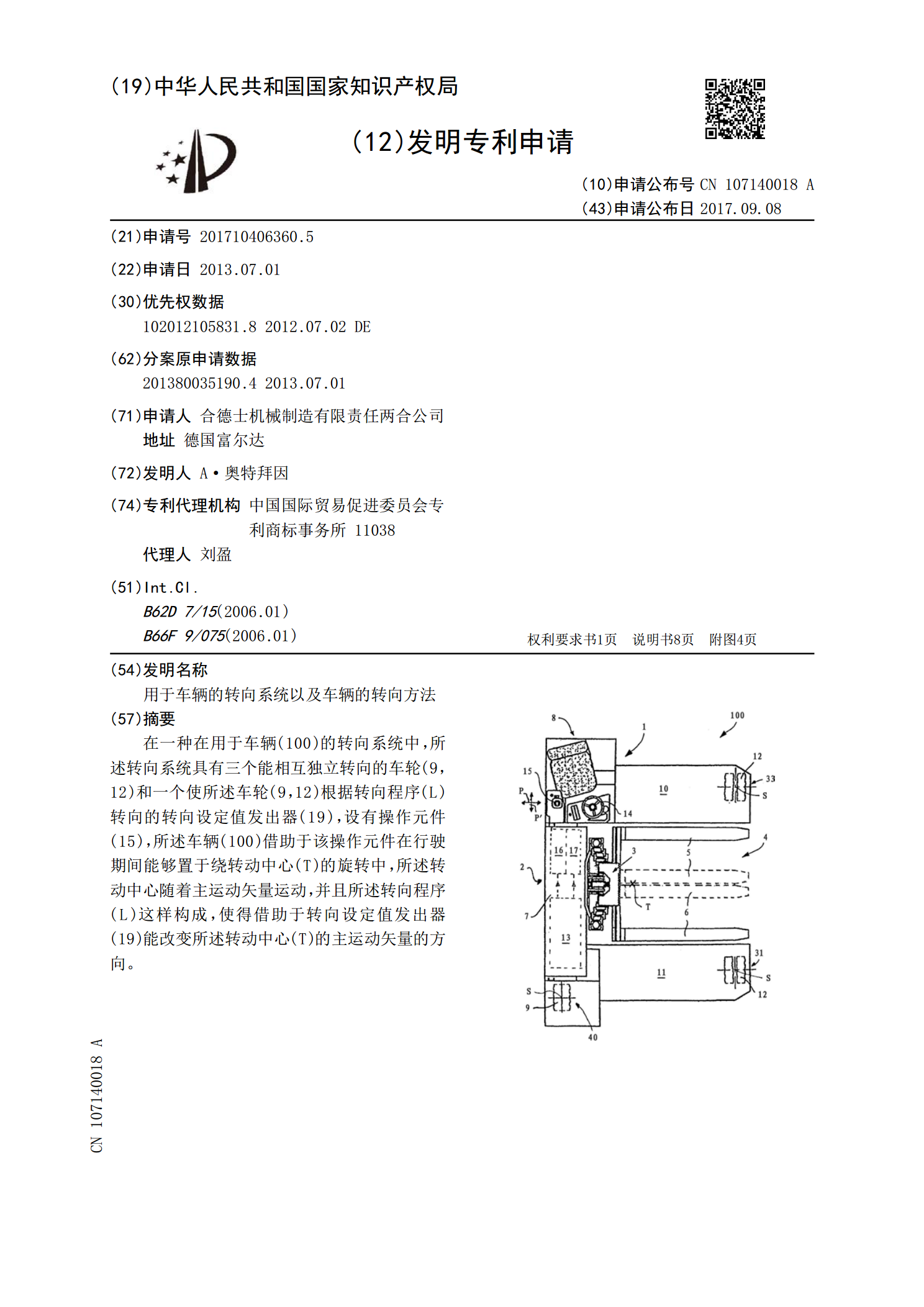
在一种在用于车辆(100)的转向系统中,所述转向系统具有三个能相互独立转向的车轮(9,12)和一个使所述车轮(9,12)根据转向程序(L)转向的转向设定值发出器(19),设有操作元件(15),所述车辆(100)借助于该操作元件在行驶期间能够置于绕转动中心(T)的旋转中,所述转动中心随着主运动矢量运动,并且所述转向程序(L)这样构成,使得借助于转向设定值发出器(19)能改变所述转动中心(T)的主运动矢量的方向。

用于车辆的转向系统以及车辆的转向方法.pdf
在一种在用于车辆(100)的转向系统中,所述转向系统具有三个能相互独立转向的车轮(9,12)和一个使所述车轮(9,12)根据转向程序(L)转向的转向设定值发出器(19),设有操作元件(15),所述车辆(100)借助于该操作元件在行驶期间能够置于绕转动中心(T)的旋转中,所述转动中心随着主运动矢量运动,并且所述转向程序(L)这样构成,使得借助于转向设定值发出器(19)能改变所述转动中心(T)的主运动矢量的方向。

用于车辆的转向装置.pdf
本发明提供一种用于车辆的转向装置,其包括:板支架,其支撑在距离支架上并且具有调节螺栓穿过的第一狭槽,该距离支架被联接至上管的外周表面以面向彼此;固定齿轮,其被联接至板支架,其中固定齿轮具有与第一狭槽对应并且调节螺栓穿过的第二狭槽以及在其相对边缘处形成的第一齿轮齿;以及可移动齿轮,其具有调节螺栓穿过的通孔以及在其相对侧上形成并且与第一齿轮齿啮合的第二齿轮齿。

用于车辆的转向装置.pdf
本发明涉及用于车辆的转向装置。根据本实施方式,可以通过在带轮和带的齿之间没有适当接合的情况下防止跳动来确保正常转向和驾驶员安全。