
用于底盘测量的方法及用于测量机动车底盘几何参数的装置.pdf

邻家****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于底盘测量的方法及用于测量机动车底盘几何参数的装置.pdf
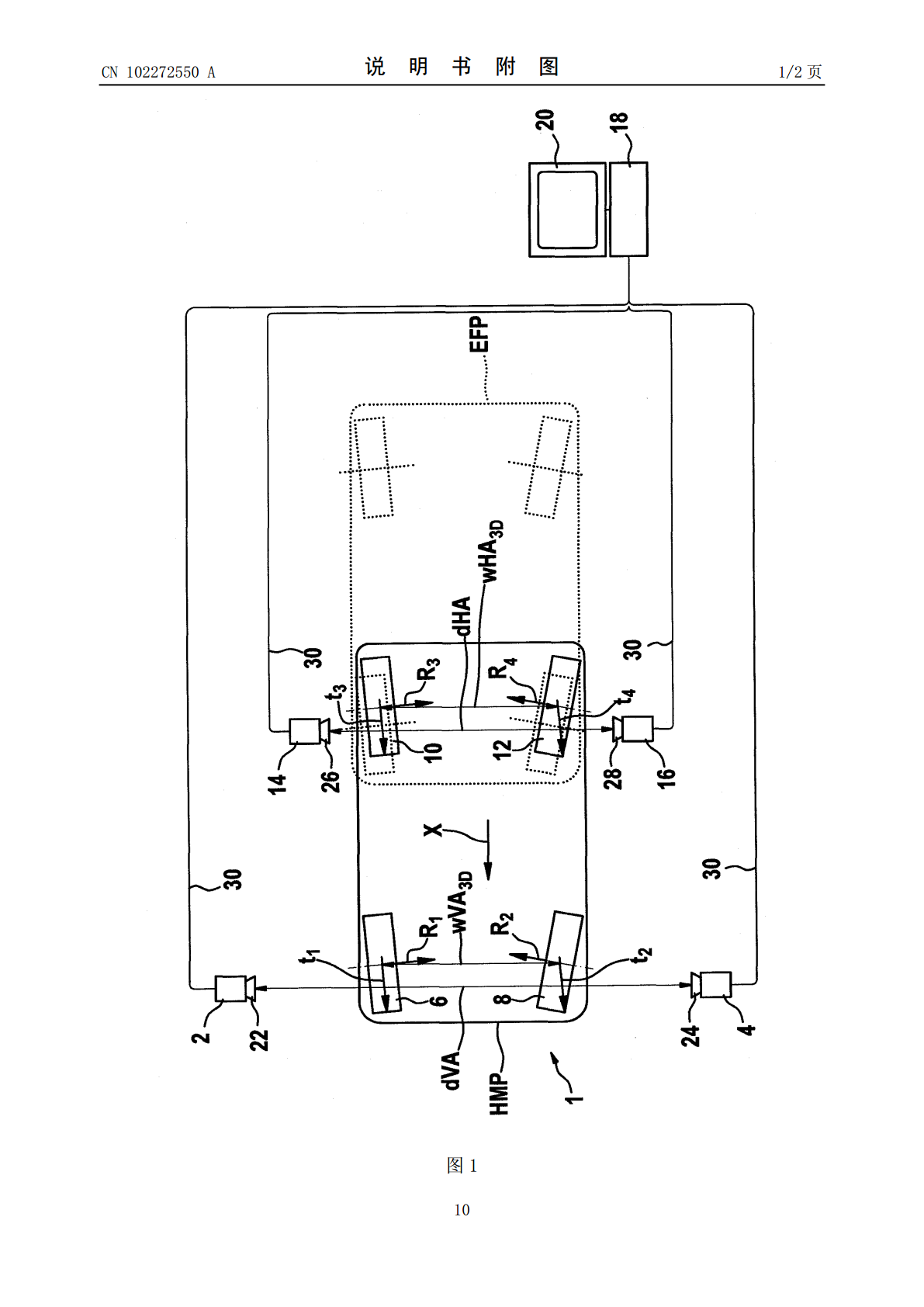
根据本发明的用于底盘测量的方法包括以下步骤:提供一个具有四个相对彼此设置在已知位置中的测量头(2,4,14,16)的底盘测量系统,每个测量头具有一个单目的摄像装置(22,24,26,28),其中,测量头(2,4,14,16)相对彼此的相对位置是已知的,并且前面的测量头(2,4)相对彼此的距离(dVA)不同于后面的测量头(14,16)相对彼此的距离(dHA);在机动车(1)的至少一个第一驶入位置中通过后面的测量头(14,16)分别拍摄一个前轮(6,8)或安设在其上的测量靶;在第一主测量位置中及在机动车(1)

用于进行底盘测量的方法和装置.pdf
按本发明的用于进行底盘测量的方法包括以下步骤:提供具有四个相对于彼此布置在已知的位置中的测量头(2、4、14、16)的底盘测量系统,在所述测量头中每个测量头具有单筒的图像采集装置(22、24、26、28);用所述四个测量头(2、4、14、16)中的每个测量头来检测处于起始位置(A)中的汽车(1)的相应车轮(6、8、10、12)的至少三个几何细节;在汽车(1)与测量头(2、4)之间执行从起始位置(A)到至少一个另外的位置(E)中的相对运动,其中已知测量头(2、4、14、16)彼此间的相对位置;用所述四个测量
用于底盘测量的方法和设备.pdf
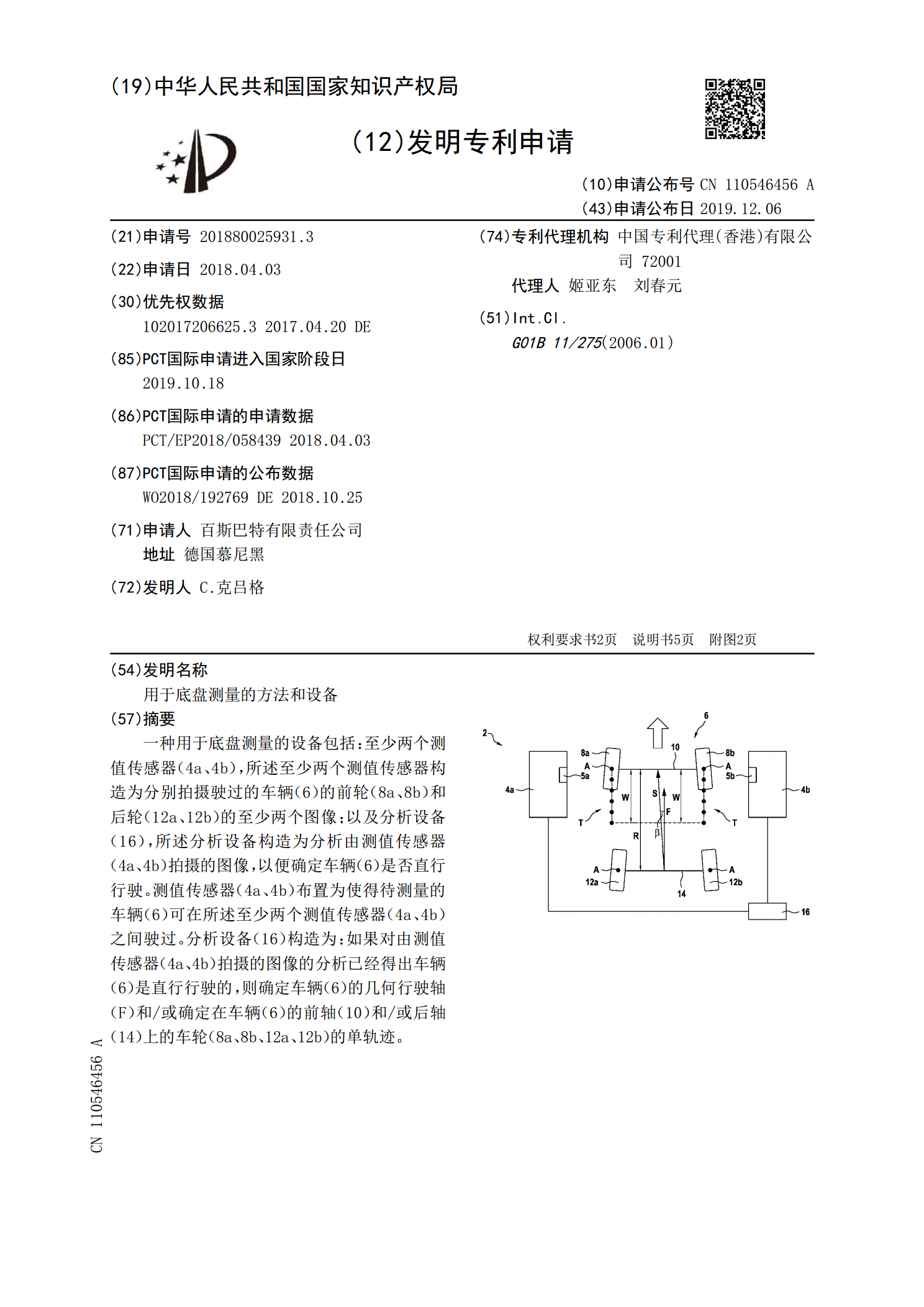
一种用于底盘测量的设备包括:至少两个测值传感器(4a、4b),所述至少两个测值传感器构造为分别拍摄驶过的车辆(6)的前轮(8a、8b)和后轮(12a、12b)的至少两个图像;以及分析设备(16),所述分析设备构造为分析由测值传感器(4a、4b)拍摄的图像,以便确定车辆(6)是否直行行驶。测值传感器(4a、4b)布置为使得待测量的车辆(6)可在所述至少两个测值传感器(4a、4b)之间驶过。分析设备(16)构造为:如果对由测值传感器(4a、4b)拍摄的图像的分析已经得出车辆(6)是直行行驶的,则确定车辆(6)

用于测量和调节在机动车的后桥上的底盘几何结构的参数的装置.pdf
本发明涉及一种在用于机动车的生产线中用于测量和调节在机动车的后桥上的底盘几何结构的参数的装置。所述生产线配置有用于后桥的抓握和保持器件以及用于后桥的负载器件。按照本发明,所述生产线配置有多个更换框架以及定位器件,所述定位器件用于将更换框架定位到用于在生产过程中抓握后桥的位置中。将用于后桥的抓握和保持器件以及用于后桥的负载器件配置给相应的更换框架。由此,更换框架可以适配于不同的车辆类型的后桥,从而可以在一条生产线中处理这些不同的后桥。

用于行驶机构测量的方法及用于测量机动车行驶机构几何参数的装置.pdf
按本发明的用于行驶机构测量的方法,具有下列步骤:提供一个具有四个相互布置在已知位置中的测量头(2,4,14,16)的行驶机构测量系统,这些测量头的每个具有一个单目的摄像装置(22,24,26,28),其中,这些测量头(2,4,14,16)彼此的相对位置是已知的;在机动车(1)的初始位置(A)中用所述四个测量头(2,4,14,16)的每个分别对车轮(6,8,10,12)或施加在该车轮上的测量靶摄像;使机动车(1)从所述初始位置(A)移动到至少另一位置(E)中;用所述四个测量头(2,4,14,16)的每个分别