
用于进行底盘测量的方法和装置.pdf

秋花****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于进行底盘测量的方法和装置.pdf
按本发明的用于进行底盘测量的方法包括以下步骤:提供具有四个相对于彼此布置在已知的位置中的测量头(2、4、14、16)的底盘测量系统,在所述测量头中每个测量头具有单筒的图像采集装置(22、24、26、28);用所述四个测量头(2、4、14、16)中的每个测量头来检测处于起始位置(A)中的汽车(1)的相应车轮(6、8、10、12)的至少三个几何细节;在汽车(1)与测量头(2、4)之间执行从起始位置(A)到至少一个另外的位置(E)中的相对运动,其中已知测量头(2、4、14、16)彼此间的相对位置;用所述四个测量

用于底盘测量的方法及用于测量机动车底盘几何参数的装置.pdf
根据本发明的用于底盘测量的方法包括以下步骤:提供一个具有四个相对彼此设置在已知位置中的测量头(2,4,14,16)的底盘测量系统,每个测量头具有一个单目的摄像装置(22,24,26,28),其中,测量头(2,4,14,16)相对彼此的相对位置是已知的,并且前面的测量头(2,4)相对彼此的距离(dVA)不同于后面的测量头(14,16)相对彼此的距离(dHA);在机动车(1)的至少一个第一驶入位置中通过后面的测量头(14,16)分别拍摄一个前轮(6,8)或安设在其上的测量靶;在第一主测量位置中及在机动车(1)

用于进行车辆测量的方法和装置.pdf
一种用于对车辆在用来进行车辆测量的测量位置上的正确的定位进行检查的方法包括以下步骤:a)拍摄所述车辆的至少两个轮胎(7)的图像;b)识别在所拍摄的图像中的特征,所述特征描绘了相应所拍摄的轮胎(7)的至少一个区域;c)使一种数学模型与所识别的特征接近;d)从所接近的数学模型中确定每个轮胎(7)的压扁的程度;e)对所述至少两个轮胎(7)的压扁进行比较。
用于底盘测量的方法和设备.pdf
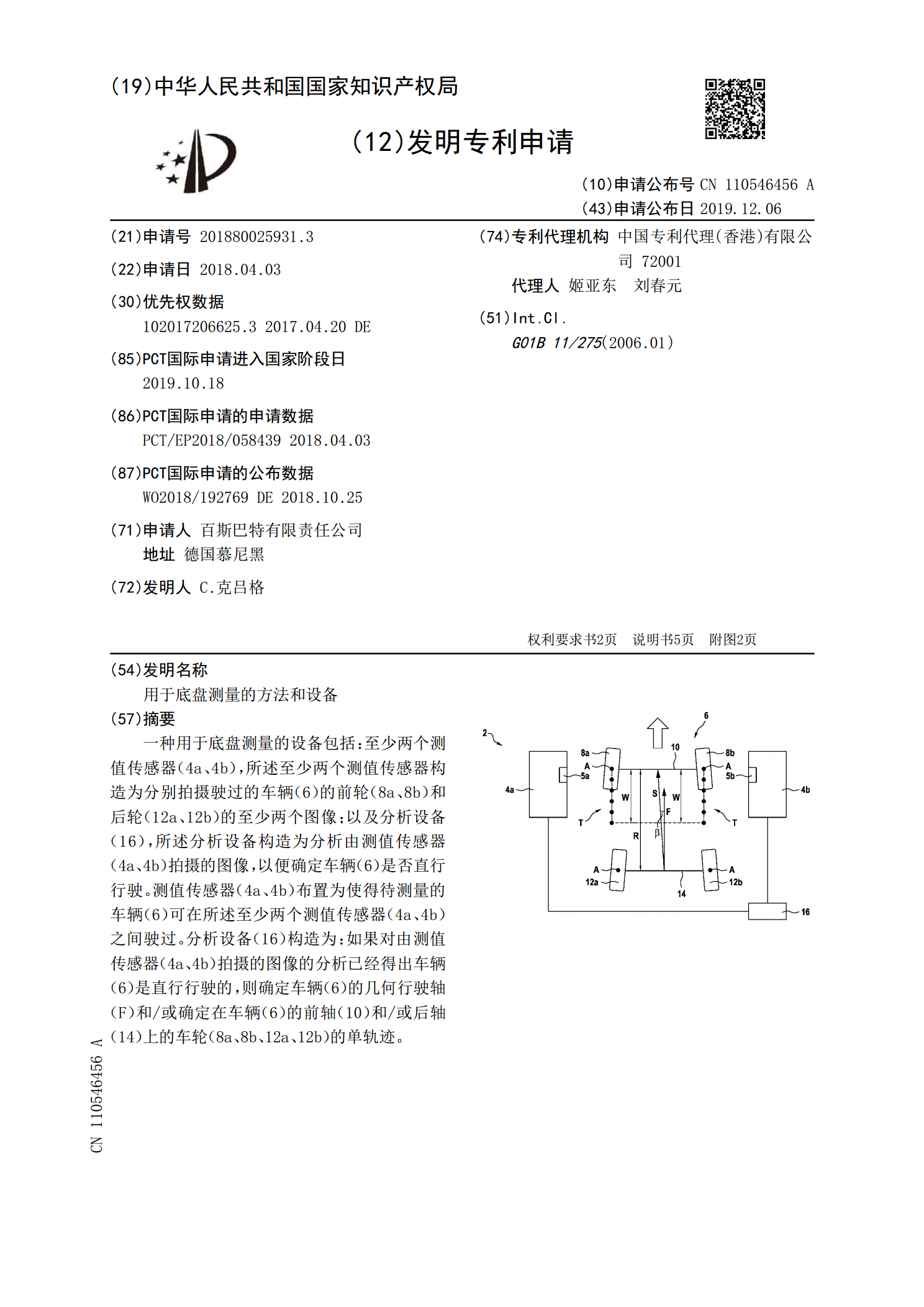
一种用于底盘测量的设备包括:至少两个测值传感器(4a、4b),所述至少两个测值传感器构造为分别拍摄驶过的车辆(6)的前轮(8a、8b)和后轮(12a、12b)的至少两个图像;以及分析设备(16),所述分析设备构造为分析由测值传感器(4a、4b)拍摄的图像,以便确定车辆(6)是否直行行驶。测值传感器(4a、4b)布置为使得待测量的车辆(6)可在所述至少两个测值传感器(4a、4b)之间驶过。分析设备(16)构造为:如果对由测值传感器(4a、4b)拍摄的图像的分析已经得出车辆(6)是直行行驶的,则确定车辆(6)
用于进行渲染的方法和装置.pdf
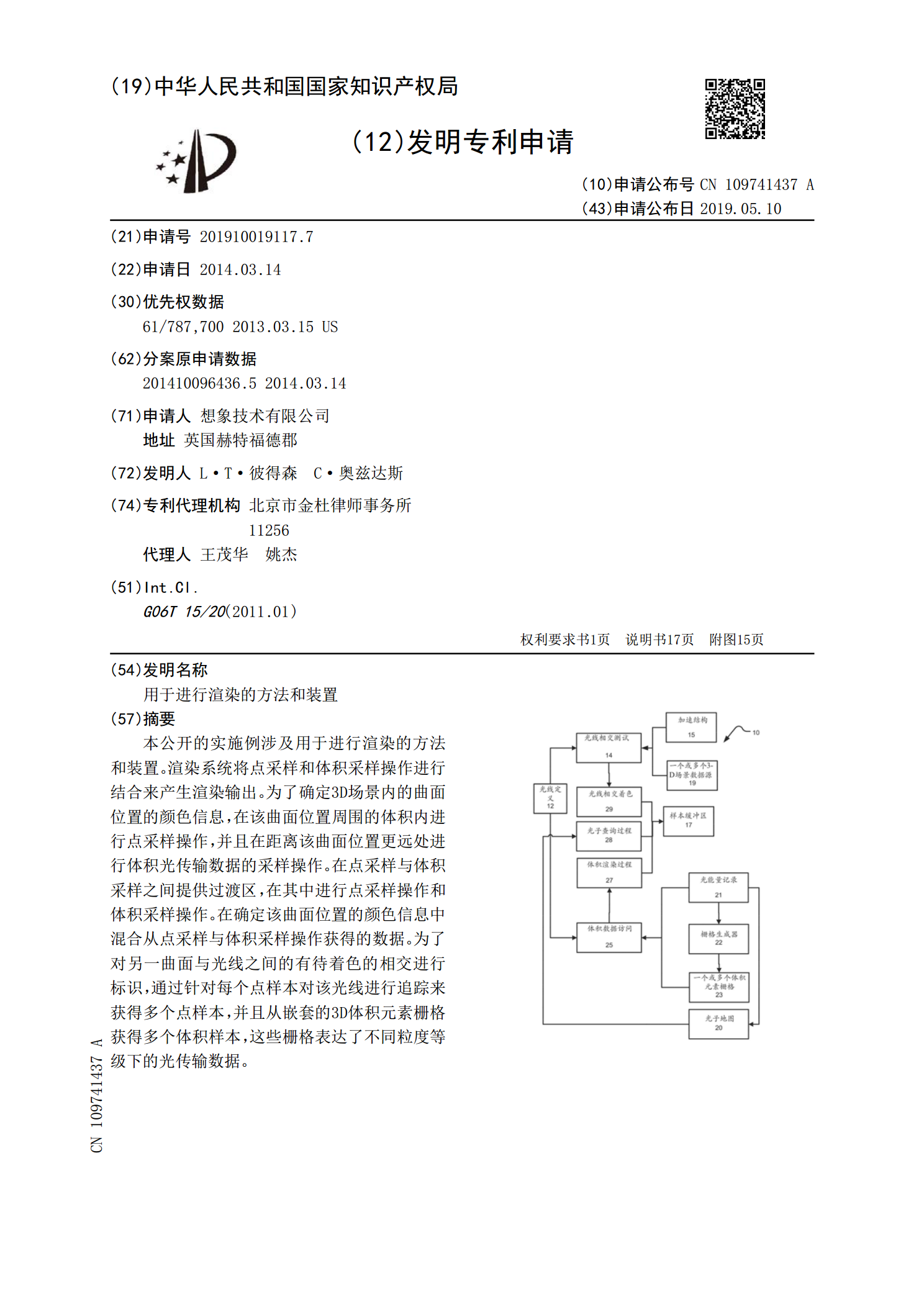
本公开的实施例涉及用于进行渲染的方法和装置。渲染系统将点采样和体积采样操作进行结合来产生渲染输出。为了确定3D场景内的曲面位置的颜色信息,在该曲面位置周围的体积内进行点采样操作,并且在距离该曲面位置更远处进行体积光传输数据的采样操作。在点采样与体积采样之间提供过渡区,在其中进行点采样操作和体积采样操作。在确定该曲面位置的颜色信息中混合从点采样与体积采样操作获得的数据。为了对另一曲面与光线之间的有待着色的相交进行标识,通过针对每个点样本对该光线进行追踪来获得多个点样本,并且从嵌套的3D体积元素栅格获得多个体