
用于底盘测量的方法和设备.pdf

猫巷****熙柔

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于底盘测量的方法和设备.pdf
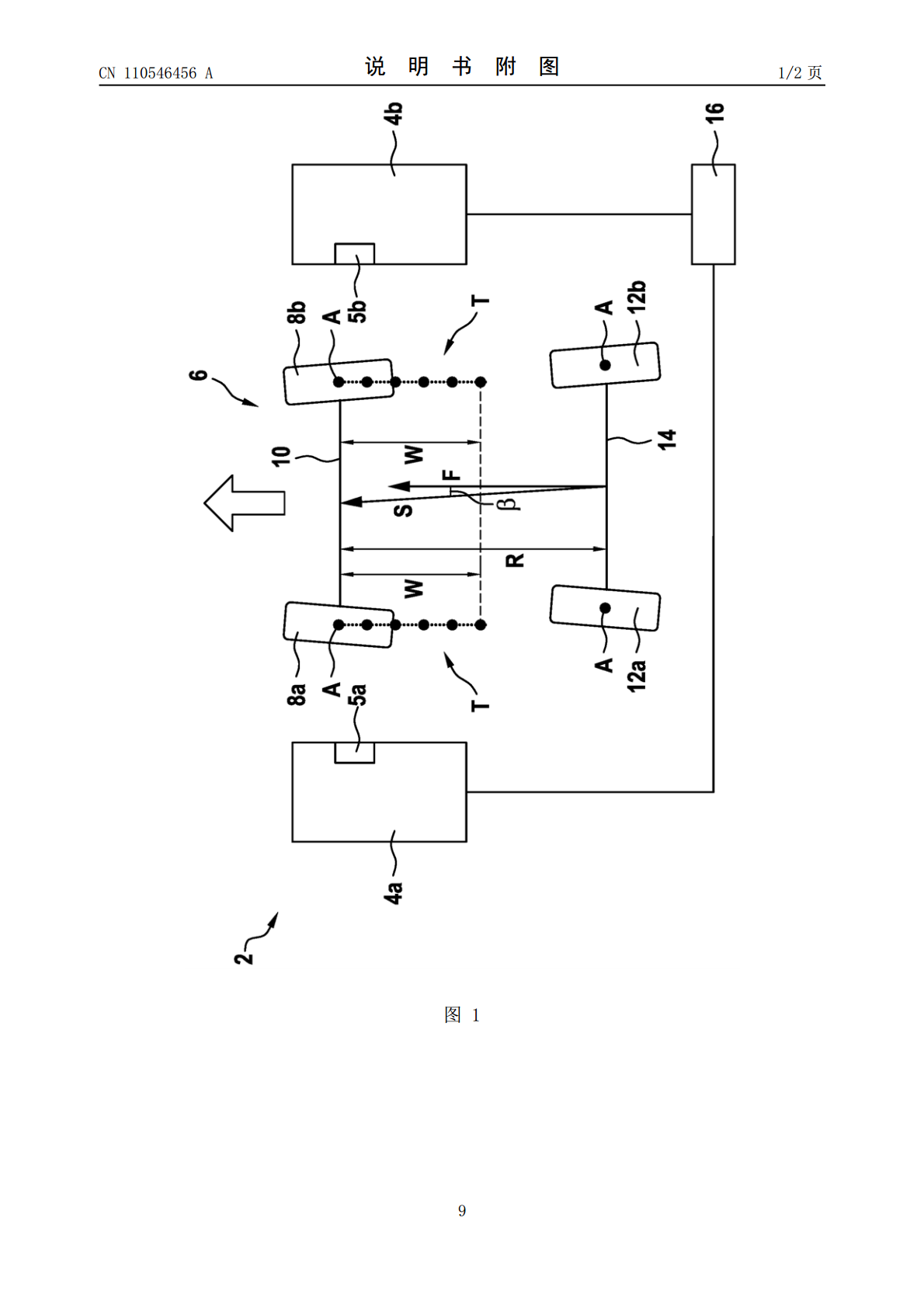
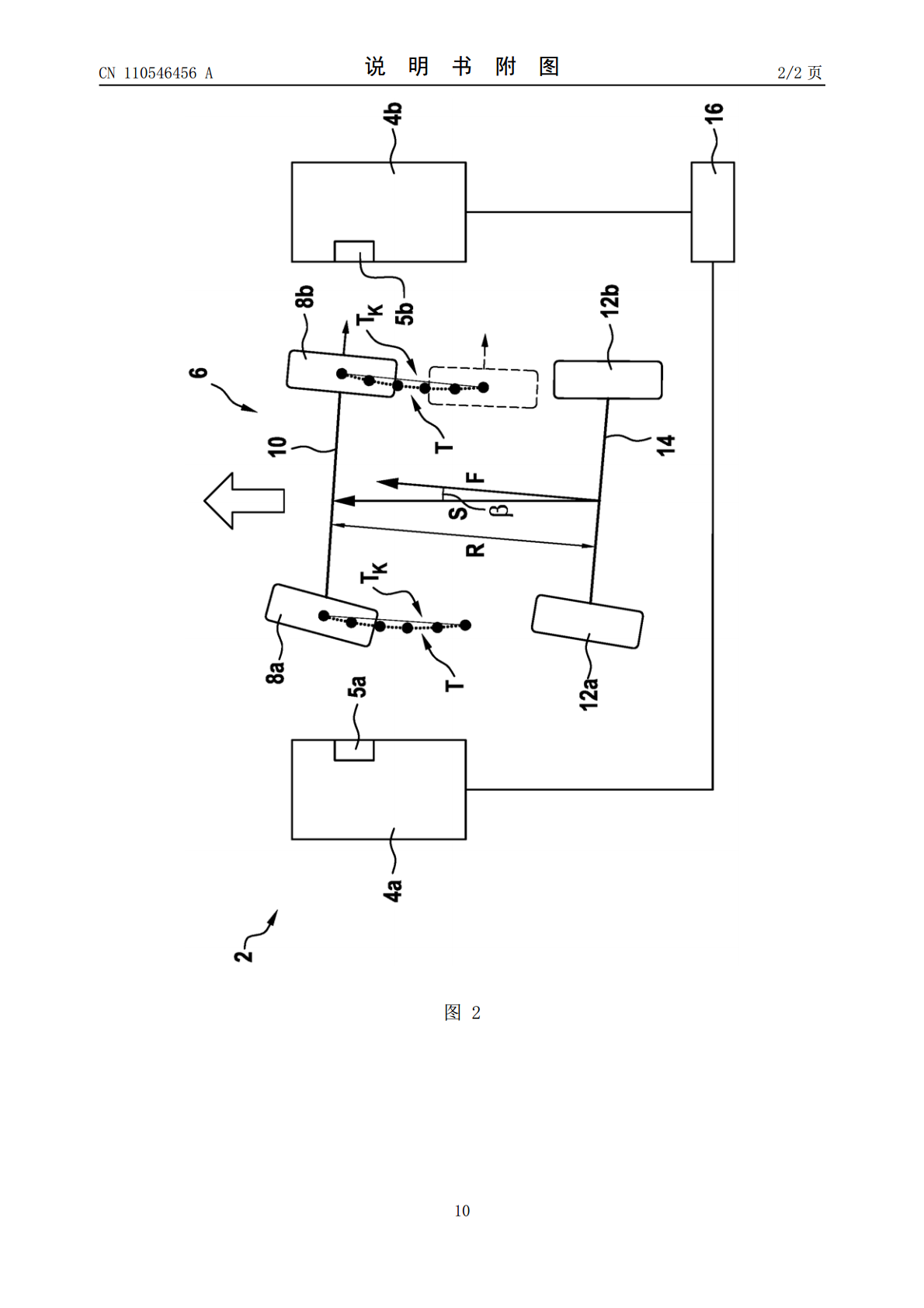
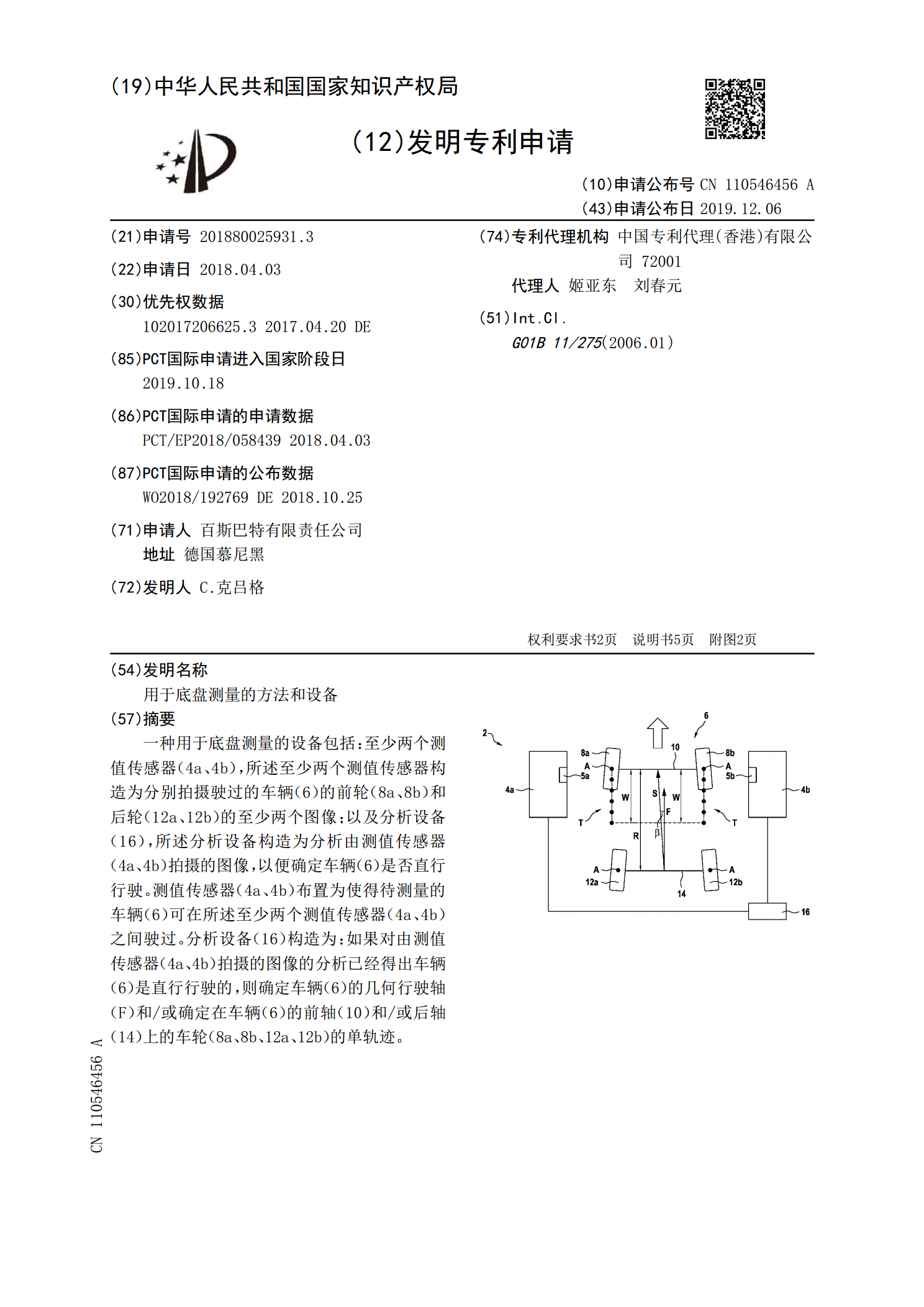
一种用于底盘测量的设备包括:至少两个测值传感器(4a、4b),所述至少两个测值传感器构造为分别拍摄驶过的车辆(6)的前轮(8a、8b)和后轮(12a、12b)的至少两个图像;以及分析设备(16),所述分析设备构造为分析由测值传感器(4a、4b)拍摄的图像,以便确定车辆(6)是否直行行驶。测值传感器(4a、4b)布置为使得待测量的车辆(6)可在所述至少两个测值传感器(4a、4b)之间驶过。分析设备(16)构造为:如果对由测值传感器(4a、4b)拍摄的图像的分析已经得出车辆(6)是直行行驶的,则确定车辆(6)

用于进行底盘测量的方法和装置.pdf
按本发明的用于进行底盘测量的方法包括以下步骤:提供具有四个相对于彼此布置在已知的位置中的测量头(2、4、14、16)的底盘测量系统,在所述测量头中每个测量头具有单筒的图像采集装置(22、24、26、28);用所述四个测量头(2、4、14、16)中的每个测量头来检测处于起始位置(A)中的汽车(1)的相应车轮(6、8、10、12)的至少三个几何细节;在汽车(1)与测量头(2、4)之间执行从起始位置(A)到至少一个另外的位置(E)中的相对运动,其中已知测量头(2、4、14、16)彼此间的相对位置;用所述四个测量

用于底盘测量的方法及用于测量机动车底盘几何参数的装置.pdf
根据本发明的用于底盘测量的方法包括以下步骤:提供一个具有四个相对彼此设置在已知位置中的测量头(2,4,14,16)的底盘测量系统,每个测量头具有一个单目的摄像装置(22,24,26,28),其中,测量头(2,4,14,16)相对彼此的相对位置是已知的,并且前面的测量头(2,4)相对彼此的距离(dVA)不同于后面的测量头(14,16)相对彼此的距离(dHA);在机动车(1)的至少一个第一驶入位置中通过后面的测量头(14,16)分别拍摄一个前轮(6,8)或安设在其上的测量靶;在第一主测量位置中及在机动车(1)
用于测量车辆的车轮、转向系统和底盘的尺寸和特征角的方法和设备.pdf
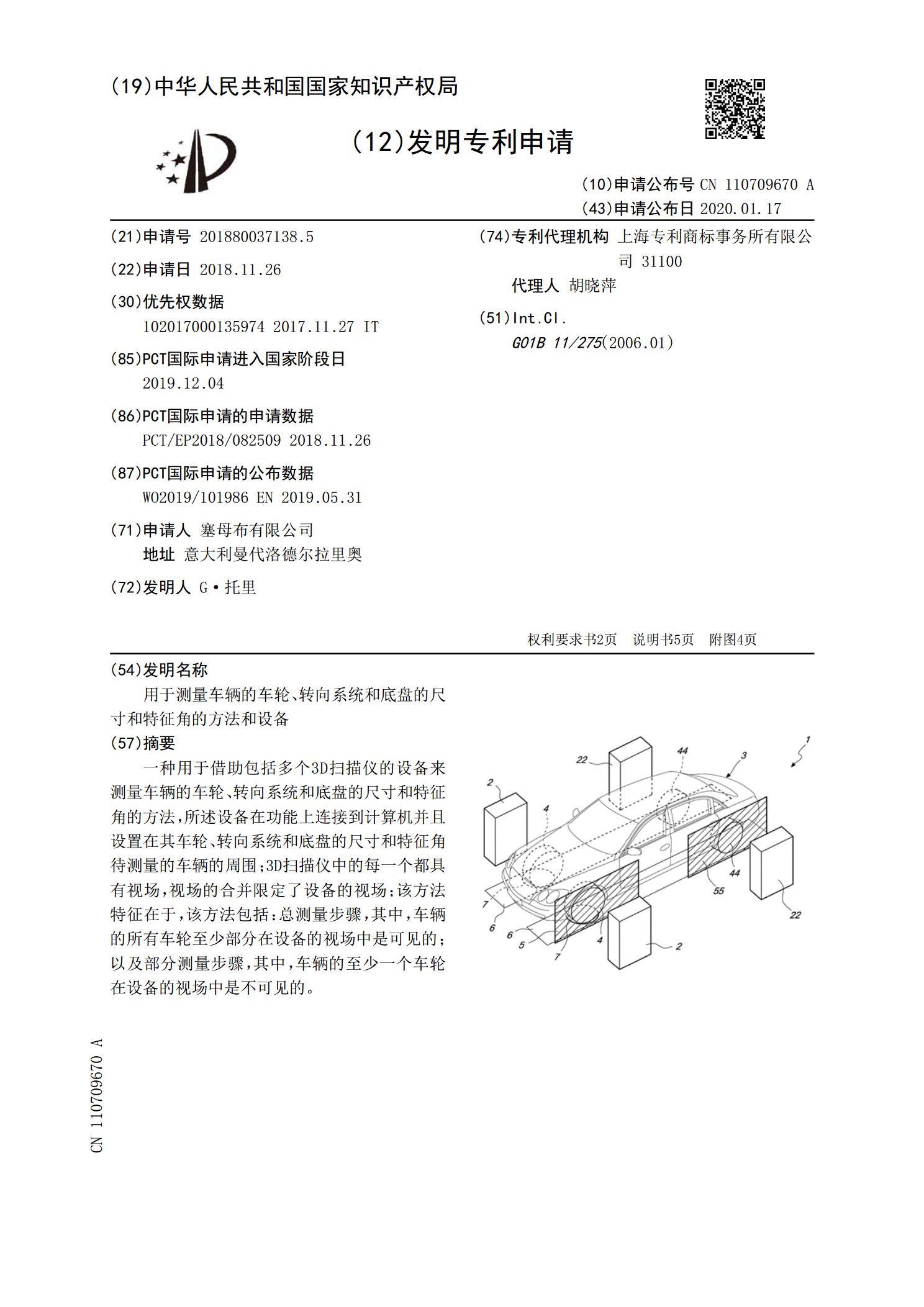
一种用于借助包括多个3D扫描仪的设备来测量车辆的车轮、转向系统和底盘的尺寸和特征角的方法,所述设备在功能上连接到计算机并且设置在其车轮、转向系统和底盘的尺寸和特征角待测量的车辆的周围;3D扫描仪中的每一个都具有视场,视场的合并限定了设备的视场;该方法特征在于,该方法包括:总测量步骤,其中,车辆的所有车轮至少部分在设备的视场中是可见的;以及部分测量步骤,其中,车辆的至少一个车轮在设备的视场中是不可见的。

用于通流测量设备的测量管、通流测量设备和用于生产测量管的方法.pdf
本发明涉及一种用于通流测量设备(5)的测量管(1)。所述测量管(1)具有基本上圆柱形的测量管部段(2),该测量管部段(2)至少在内壁(IW)上由钽(Ta)构成。根据本发明,基本上由贵金属(EM)构成的至少一个插入件(3)被插入两个端部侧开口(21;22)之一中,使得由钽构成的所述内壁与所述贵金属直接接触。以这种方式,以非常简单的方式减少了所述测量管(1)的氢脆。此外,本发明涉及一种包括根据本发明的测量管(1)的通流测量设备(5)以及一种用于生产测量管(1)的方法。