
非破坏性机器人检查方法及其系统.pdf

志玉****爱啊

1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
非破坏性机器人检查方法及其系统.pdf
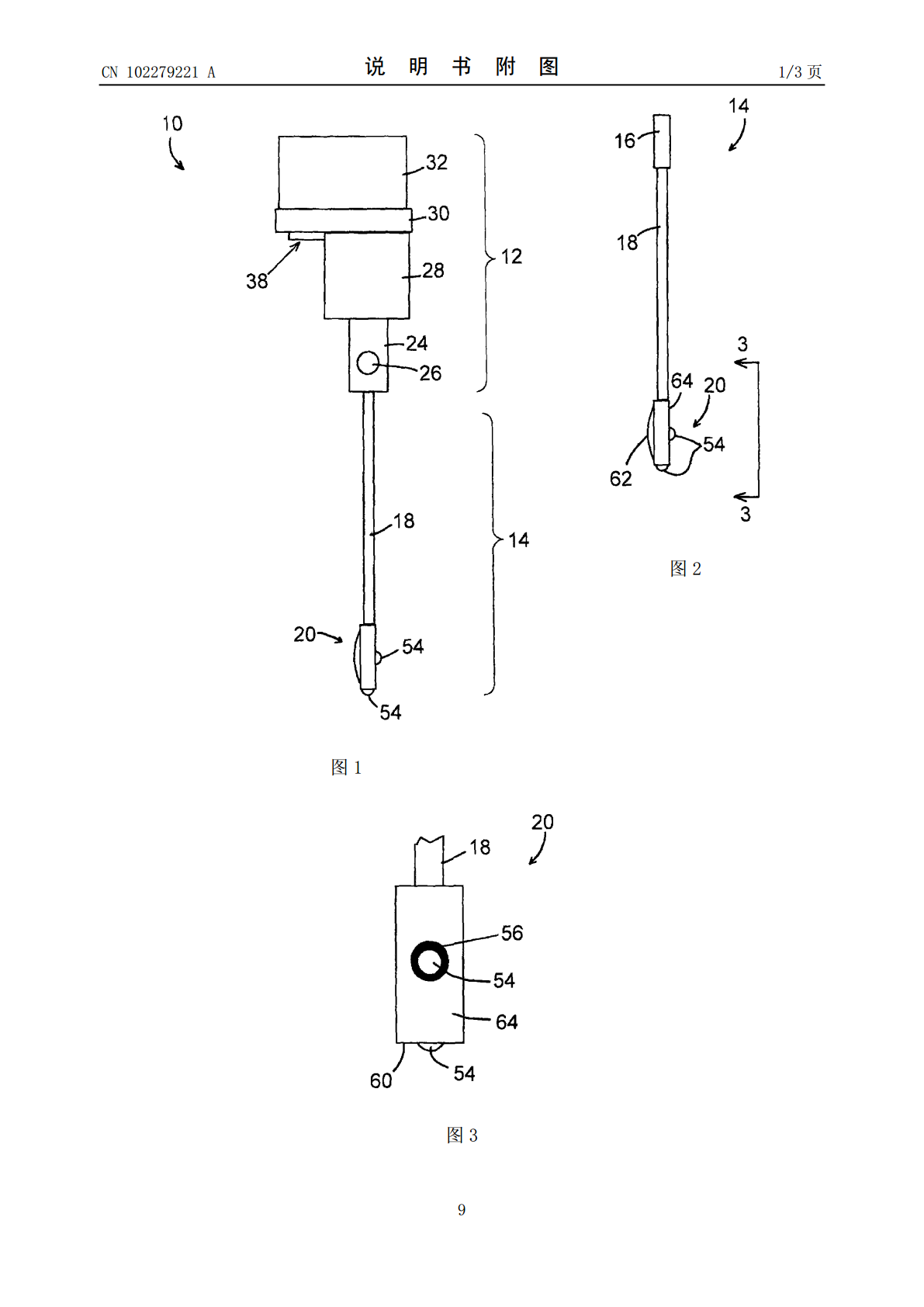
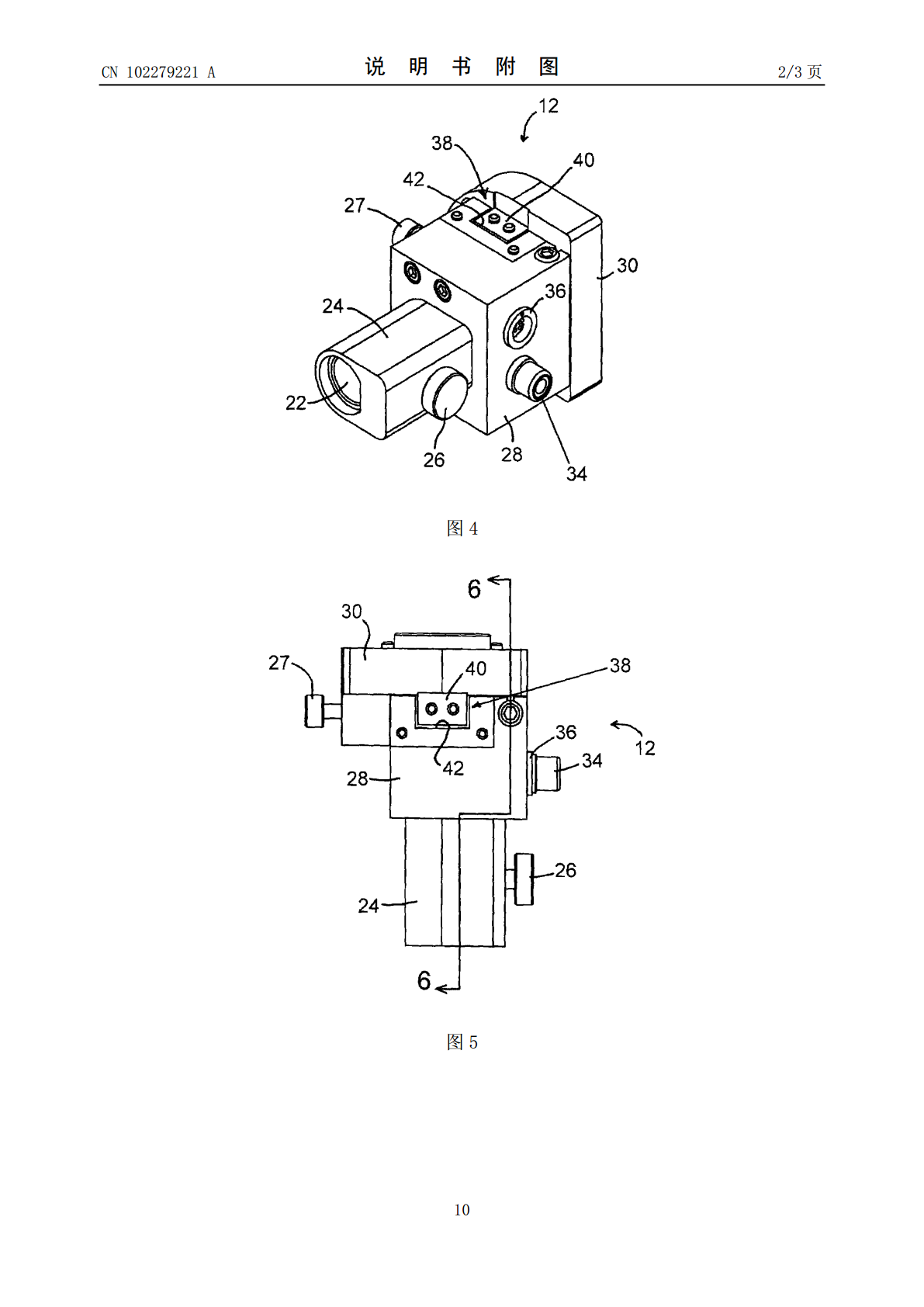
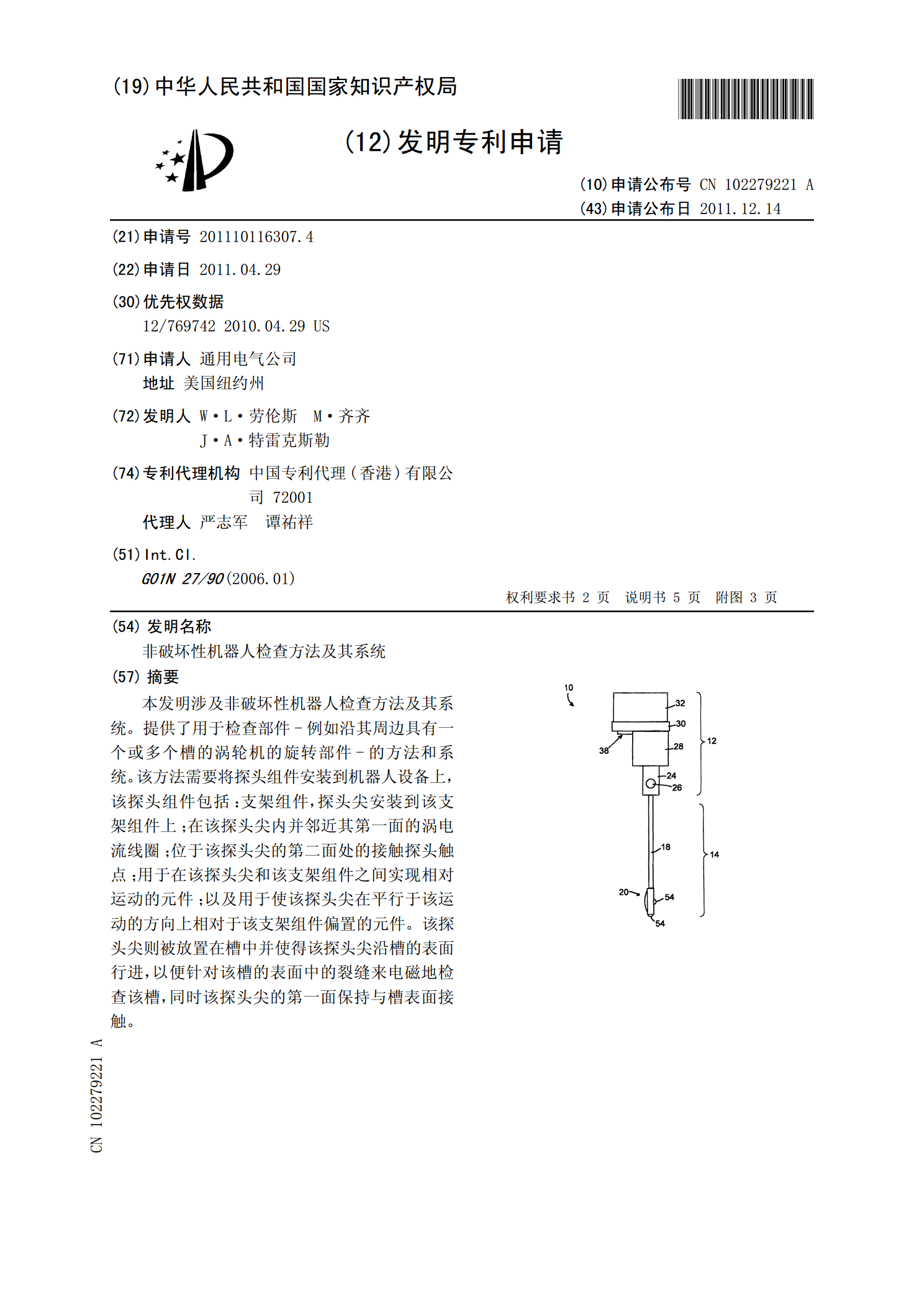
本发明涉及非破坏性机器人检查方法及其系统。提供了用于检查部件-例如沿其周边具有一个或多个槽的涡轮机的旋转部件-的方法和系统。该方法需要将探头组件安装到机器人设备上,该探头组件包括:支架组件,探头尖安装到该支架组件上;在该探头尖内并邻近其第一面的涡电流线圈;位于该探头尖的第二面处的接触探头触点;用于在该探头尖和该支架组件之间实现相对运动的元件;以及用于使该探头尖在平行于该运动的方向上相对于该支架组件偏置的元件。该探头尖则被放置在槽中并使得该探头尖沿槽的表面行进,以便针对该槽的表面中的裂缝来电磁地检查该槽,同
非破坏性管道检查装置.pdf
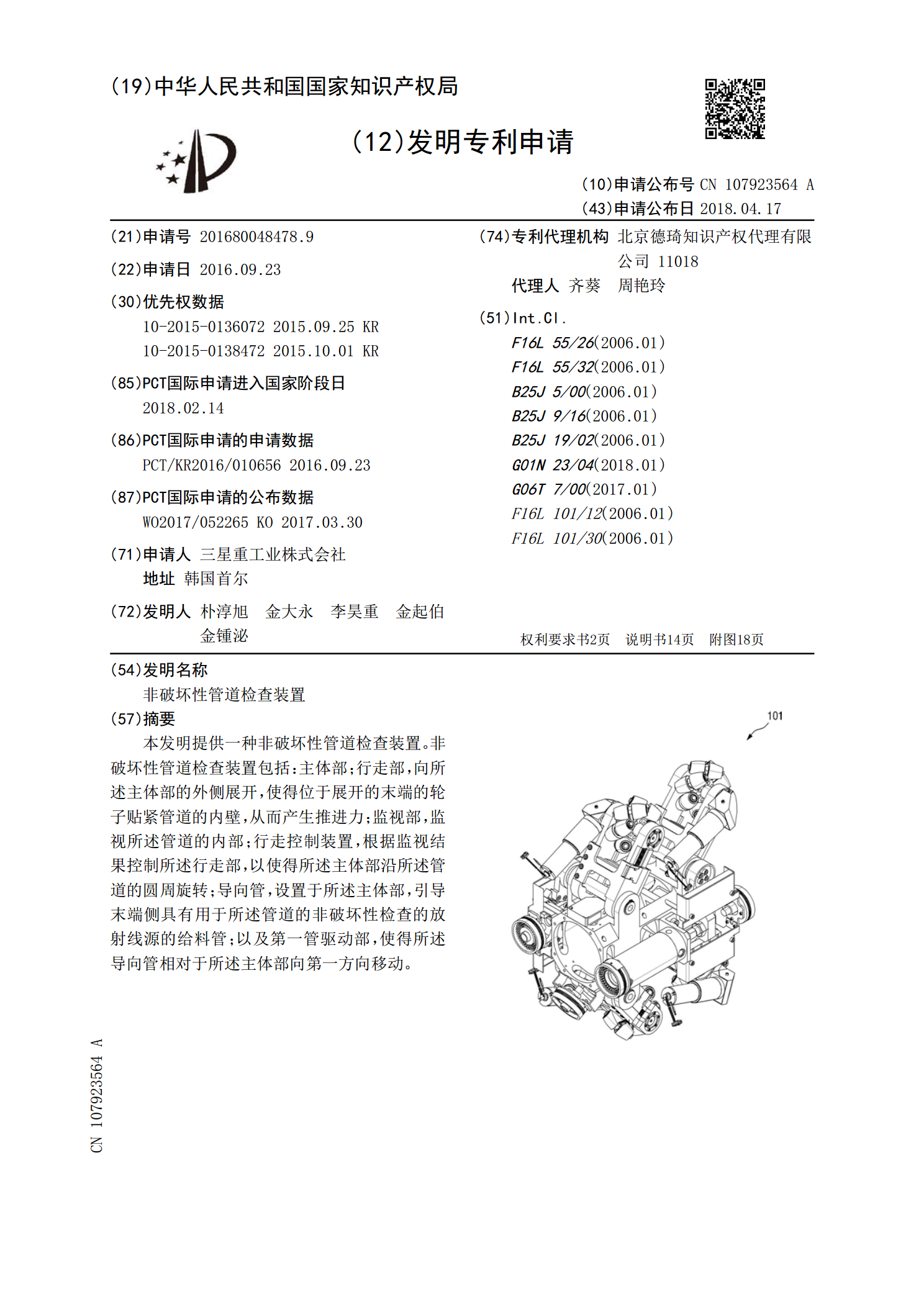
本发明提供一种非破坏性管道检查装置。非破坏性管道检查装置包括:主体部;行走部,向所述主体部的外侧展开,使得位于展开的末端的轮子贴紧管道的内壁,从而产生推进力;监视部,监视所述管道的内部;行走控制装置,根据监视结果控制所述行走部,以使得所述主体部沿所述管道的圆周旋转;导向管,设置于所述主体部,引导末端侧具有用于所述管道的非破坏性检查的放射线源的给料管;以及第一管驱动部,使得所述导向管相对于所述主体部向第一方向移动。
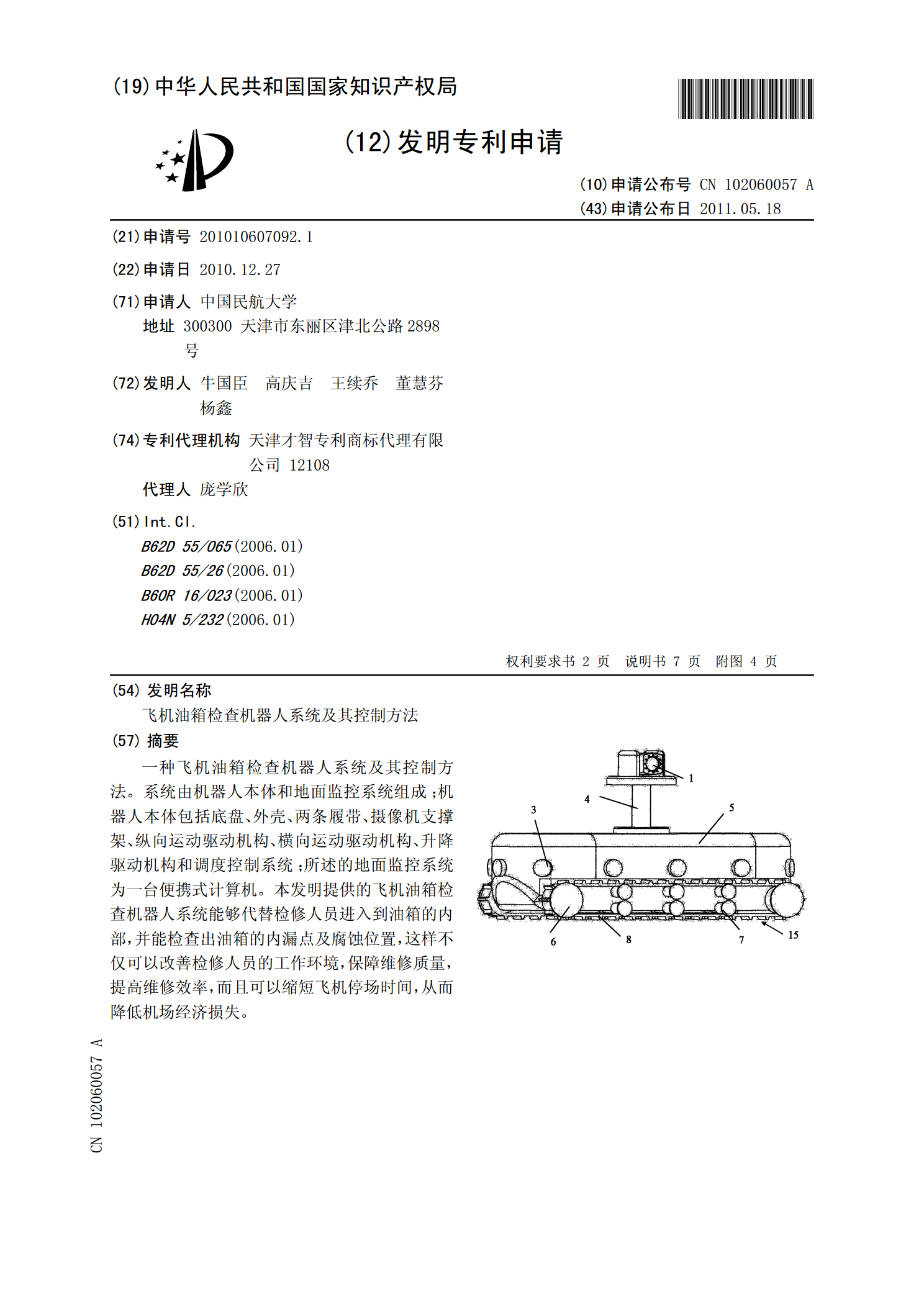
飞机油箱检查机器人系统及其控制方法.pdf
一种飞机油箱检查机器人系统及其控制方法。系统由机器人本体和地面监控系统组成;机器人本体包括底盘、外壳、两条履带、摄像机支撑架、纵向运动驱动机构、横向运动驱动机构、升降驱动机构和调度控制系统;所述的地面监控系统为一台便携式计算机。本发明提供的飞机油箱检查机器人系统能够代替检修人员进入到油箱的内部,并能检查出油箱的内漏点及腐蚀位置,这样不仅可以改善检修人员的工作环境,保障维修质量,提高维修效率,而且可以缩短飞机停场时间,从而降低机场经济损失。
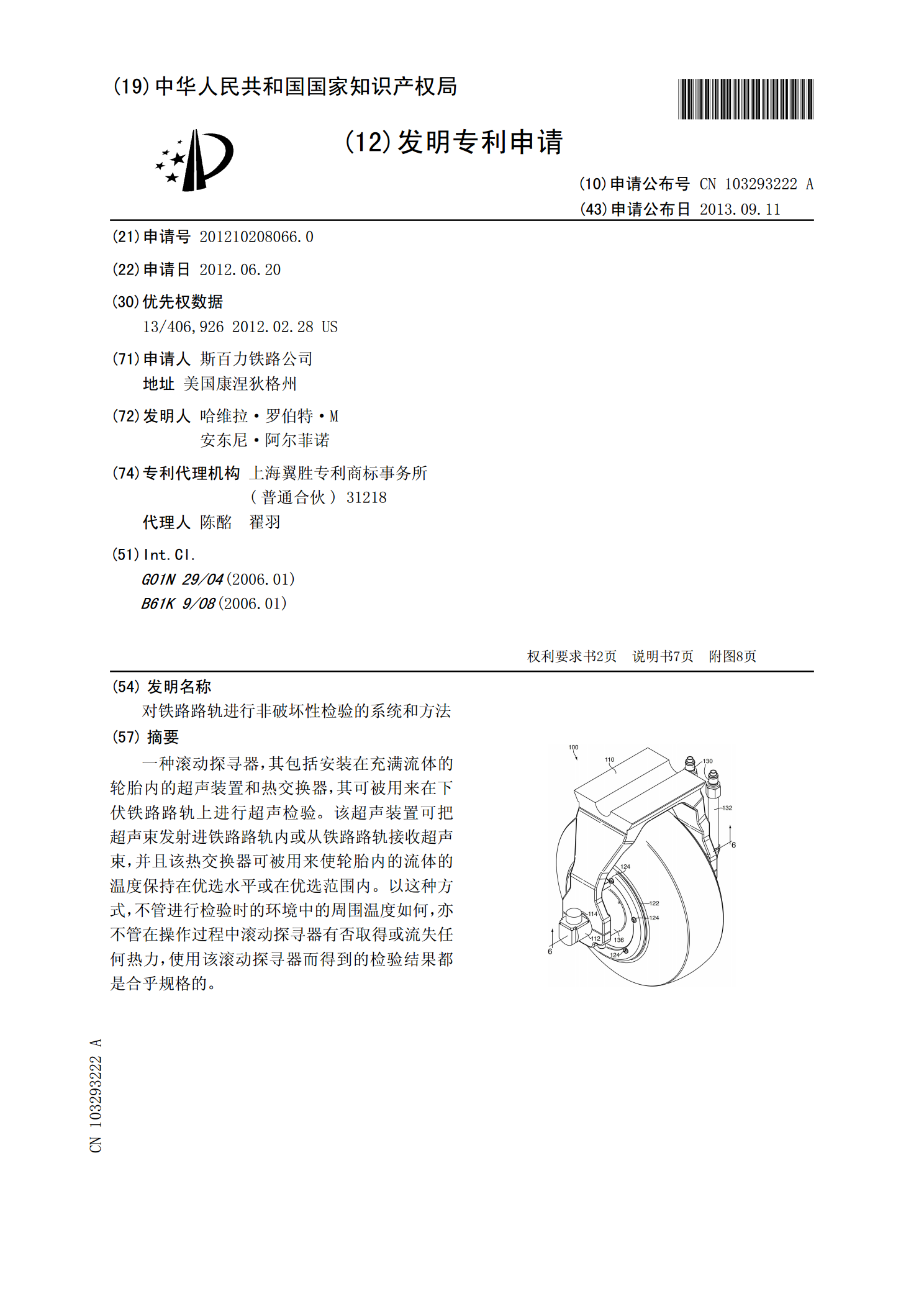
对铁路路轨进行非破坏性检验的系统和方法.pdf
一种滚动探寻器,其包括安装在充满流体的轮胎内的超声装置和热交换器,其可被用来在下伏铁路路轨上进行超声检验。该超声装置可把超声束发射进铁路路轨内或从铁路路轨接收超声束,并且该热交换器可被用来使轮胎内的流体的温度保持在优选水平或在优选范围内。以这种方式,不管进行检验时的环境中的周围温度如何,亦不管在操作过程中滚动探寻器有否取得或流失任何热力,使用该滚动探寻器而得到的检验结果都是合乎规格的。
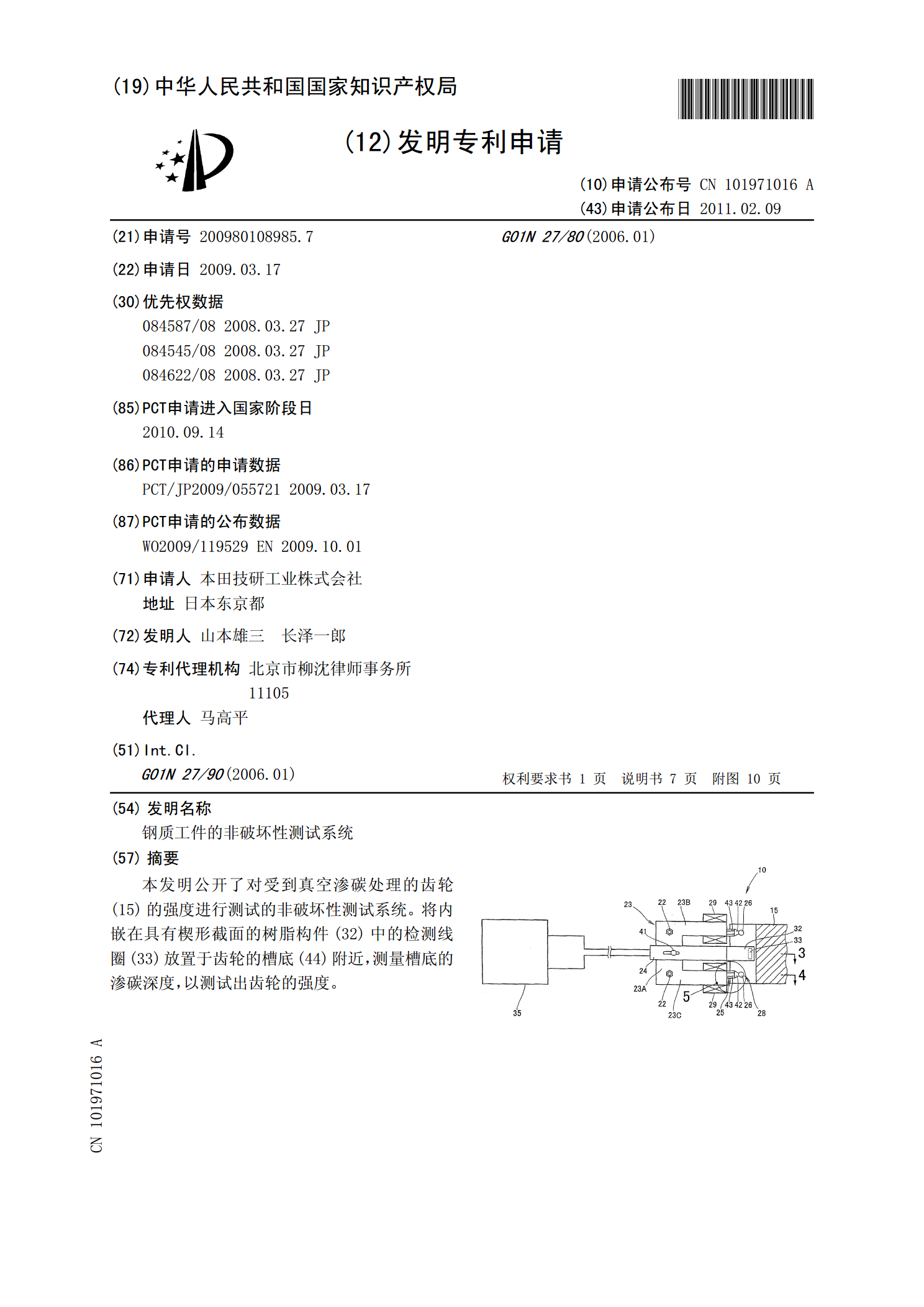
钢质工件的非破坏性测试系统.pdf
本发明公开了对受到真空渗碳处理的齿轮(15)的强度进行测试的非破坏性测试系统。将内嵌在具有楔形截面的树脂构件(32)中的检测线圈(33)放置于齿轮的槽底(44)附近,测量槽底的渗碳深度,以测试出齿轮的强度。