
飞机油箱检查机器人系统及其控制方法.pdf

诗文****仙女

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
飞机油箱检查机器人系统及其控制方法.pdf
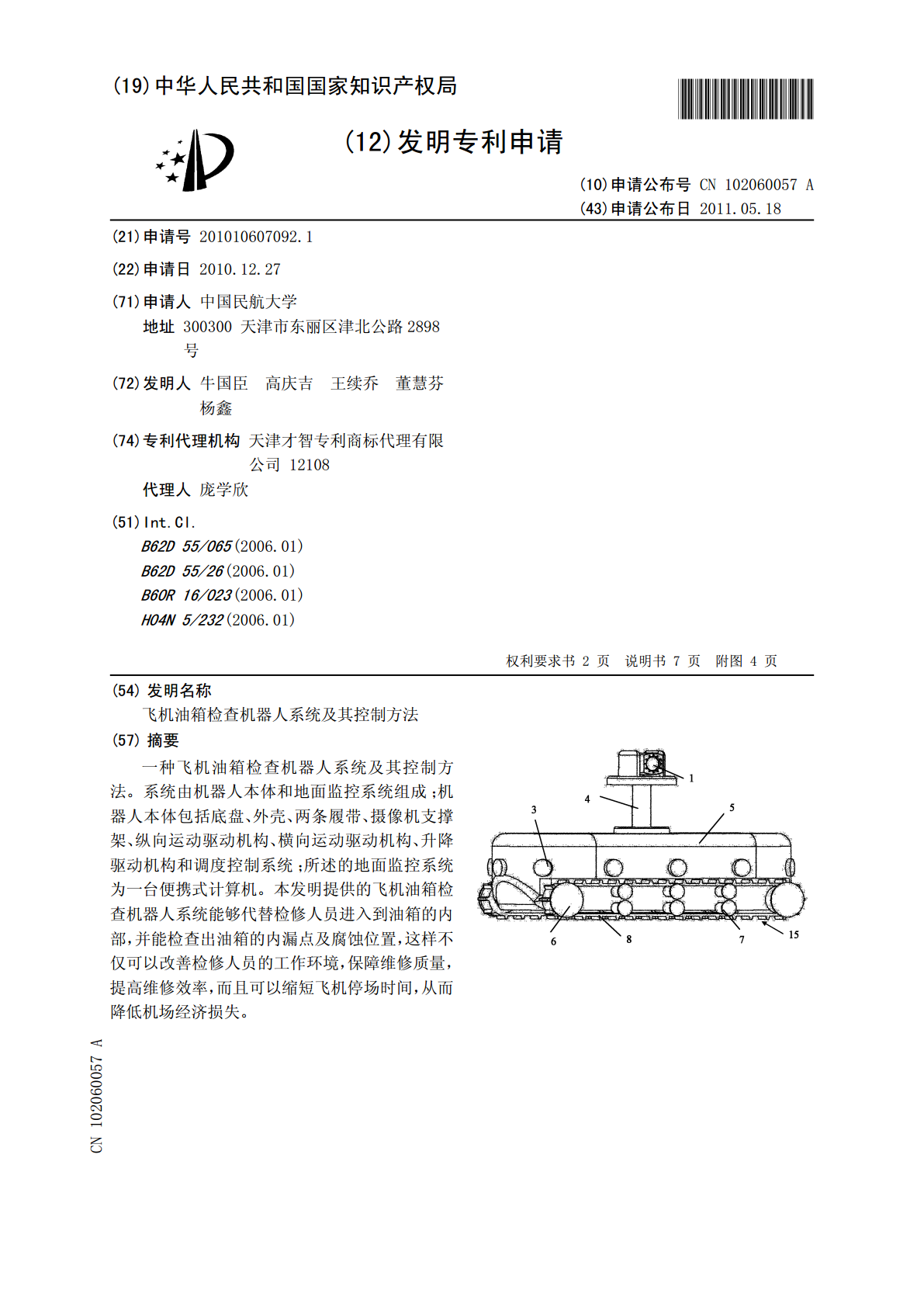
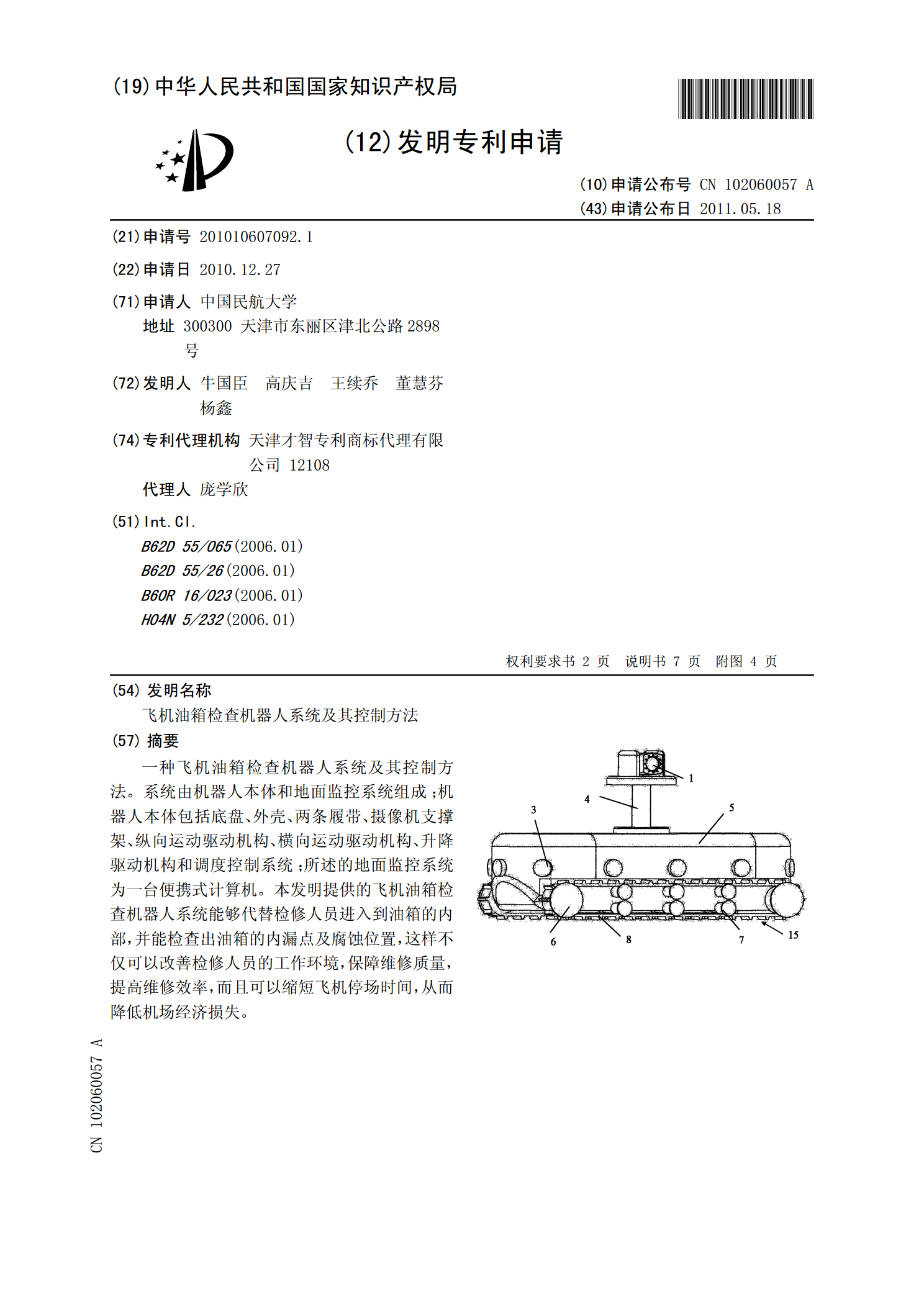
一种飞机油箱检查机器人系统及其控制方法。系统由机器人本体和地面监控系统组成;机器人本体包括底盘、外壳、两条履带、摄像机支撑架、纵向运动驱动机构、横向运动驱动机构、升降驱动机构和调度控制系统;所述的地面监控系统为一台便携式计算机。本发明提供的飞机油箱检查机器人系统能够代替检修人员进入到油箱的内部,并能检查出油箱的内漏点及腐蚀位置,这样不仅可以改善检修人员的工作环境,保障维修质量,提高维修效率,而且可以缩短飞机停场时间,从而降低机场经济损失。
一种汽车油箱防盗系统及其控制方法.pdf
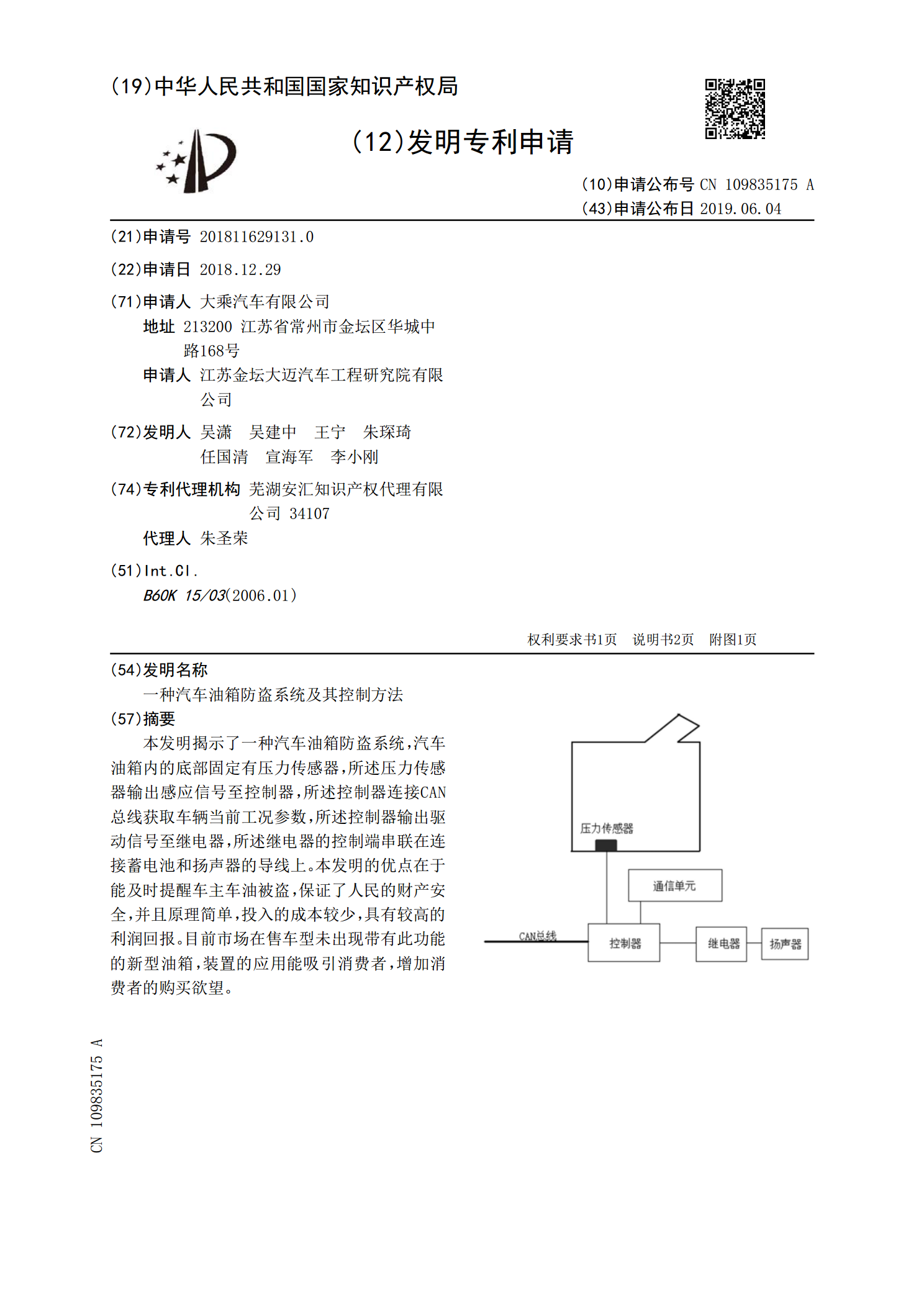
本发明揭示了一种汽车油箱防盗系统,汽车油箱内的底部固定有压力传感器,所述压力传感器输出感应信号至控制器,所述控制器连接CAN总线获取车辆当前工况参数,所述控制器输出驱动信号至继电器,所述继电器的控制端串联在连接蓄电池和扬声器的导线上。本发明的优点在于能及时提醒车主车油被盗,保证了人民的财产安全,并且原理简单,投入的成本较少,具有较高的利润回报。目前市场在售车型未出现带有此功能的新型油箱,装置的应用能吸引消费者,增加消费者的购买欲望。
飞机的电动滑行系统及其控制方法.pdf
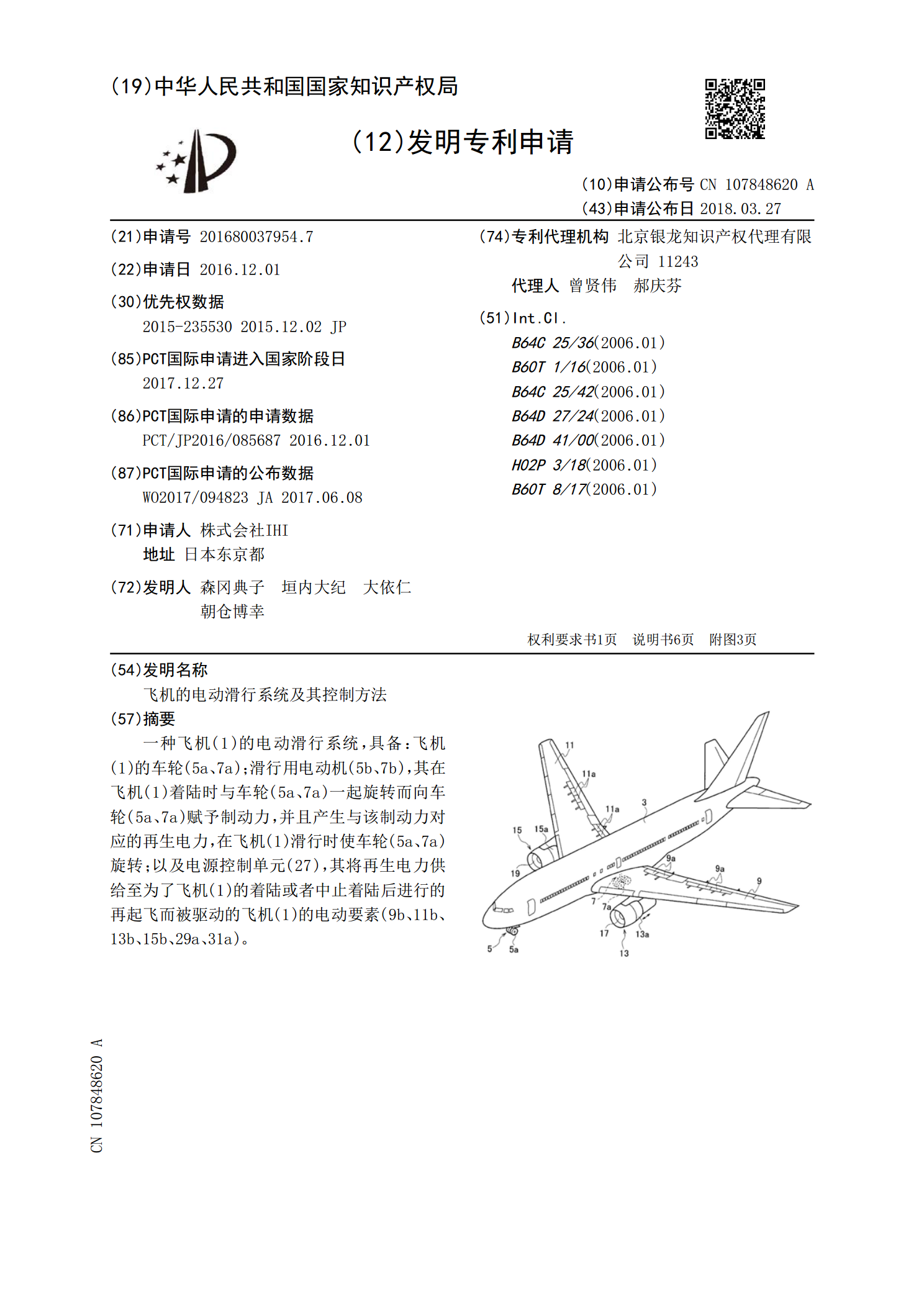
一种飞机(1)的电动滑行系统,具备:飞机(1)的车轮(5a、7a);滑行用电动机(5b、7b),其在飞机(1)着陆时与车轮(5a、7a)一起旋转而向车轮(5a、7a)赋予制动力,并且产生与该制动力对应的再生电力,在飞机(1)滑行时使车轮(5a、7a)旋转;以及电源控制单元(27),其将再生电力供给至为了飞机(1)的着陆或者中止着陆后进行的再起飞而被驱动的飞机(1)的电动要素(9b、11b、13b、15b、29a、31a)。
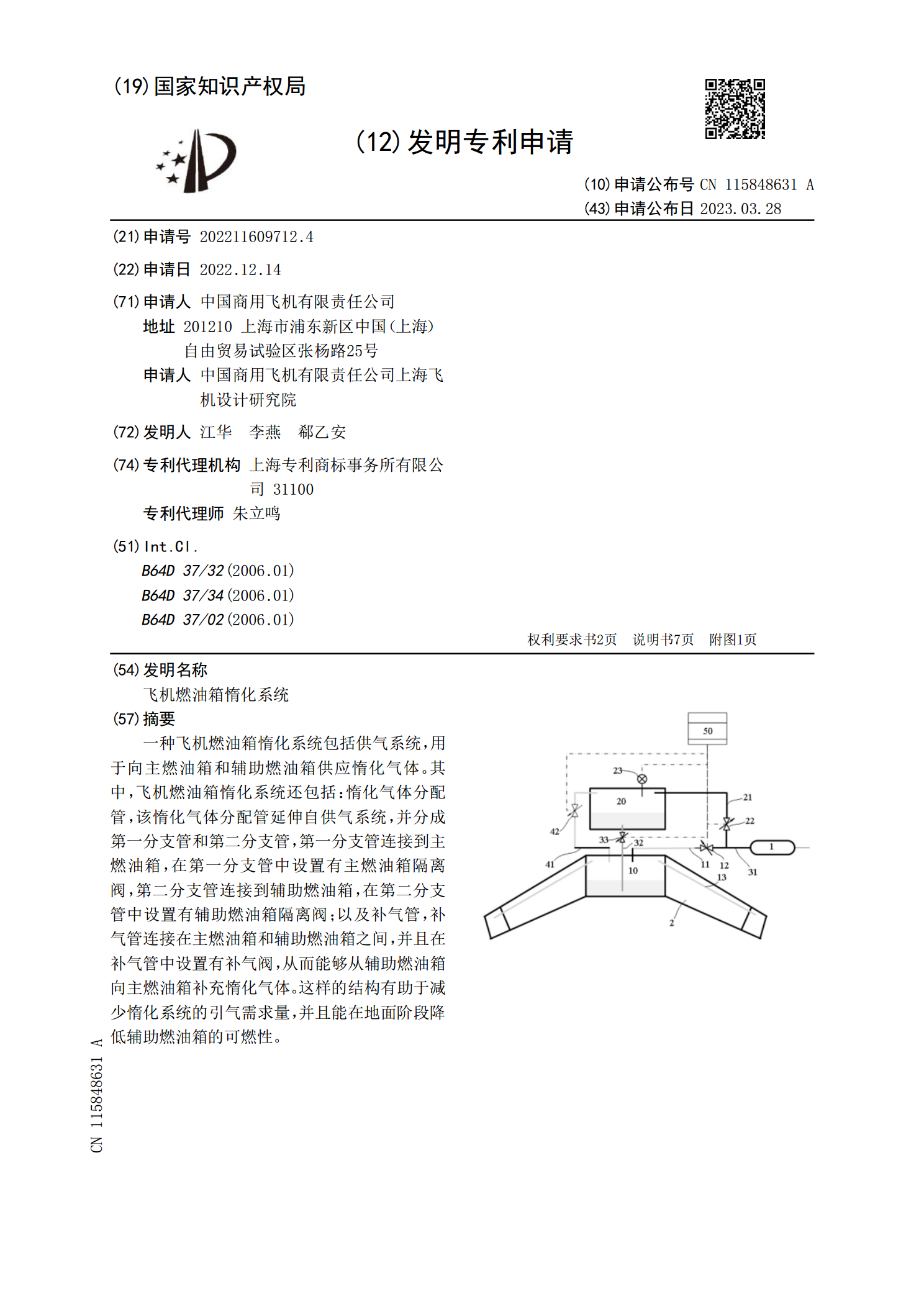
飞机燃油箱惰化系统.pdf
一种飞机燃油箱惰化系统包括供气系统,用于向主燃油箱和辅助燃油箱供应惰化气体。其中,飞机燃油箱惰化系统还包括:惰化气体分配管,该惰化气体分配管延伸自供气系统,并分成第一分支管和第二分支管,第一分支管连接到主燃油箱,在第一分支管中设置有主燃油箱隔离阀,第二分支管连接到辅助燃油箱,在第二分支管中设置有辅助燃油箱隔离阀;以及补气管,补气管连接在主燃油箱和辅助燃油箱之间,并且在补气管中设置有补气阀,从而能够从辅助燃油箱向主燃油箱补充惰化气体。这样的结构有助于减少惰化系统的引气需求量,并且能在地面阶段降低辅助燃油箱的
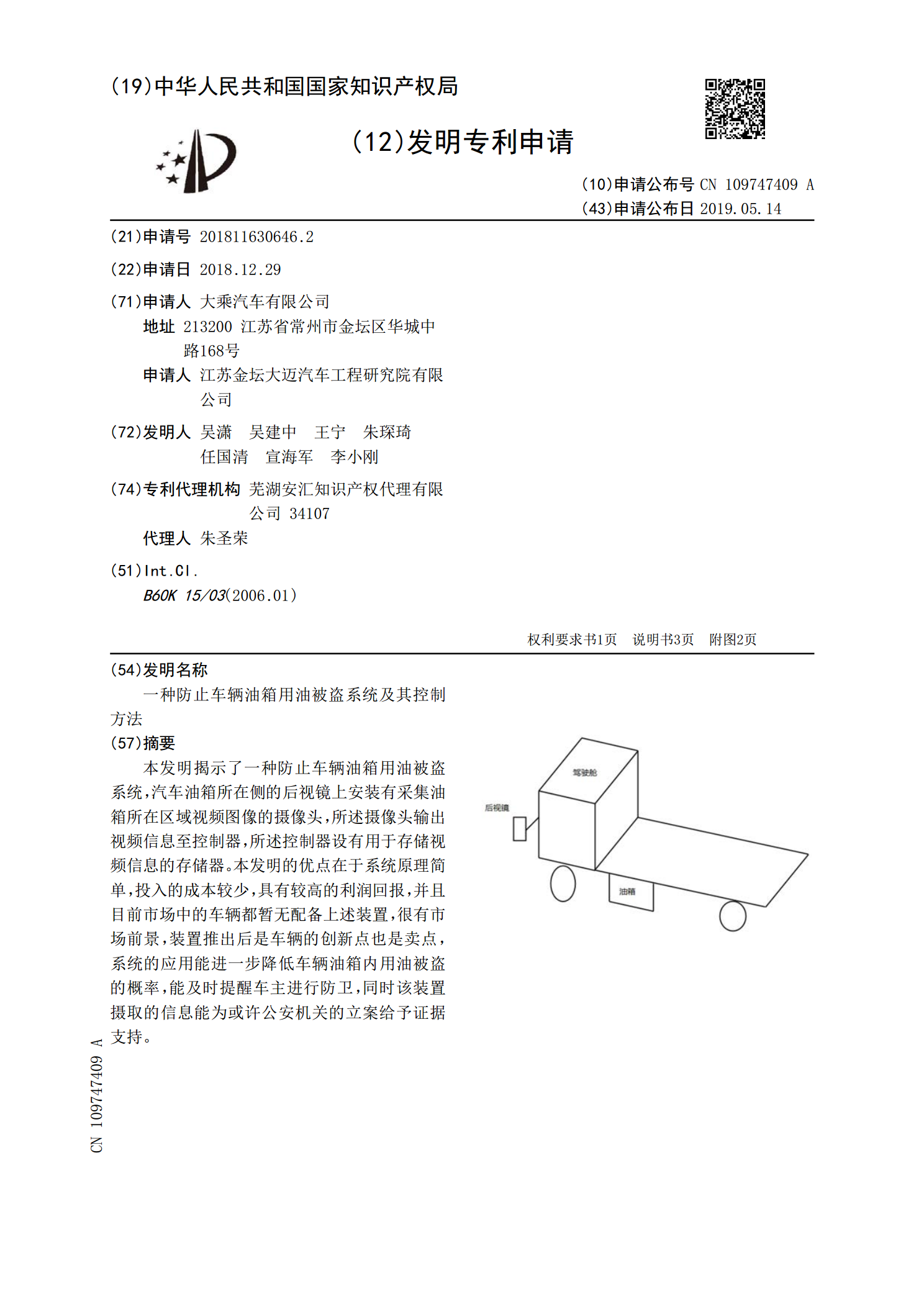
一种防止车辆油箱用油被盗系统及其控制方法.pdf
本发明揭示了一种防止车辆油箱用油被盗系统,汽车油箱所在侧的后视镜上安装有采集油箱所在区域视频图像的摄像头,所述摄像头输出视频信息至控制器,所述控制器设有用于存储视频信息的存储器。本发明的优点在于系统原理简单,投入的成本较少,具有较高的利润回报,并且目前市场中的车辆都暂无配备上述装置,很有市场前景,装置推出后是车辆的创新点也是卖点,系统的应用能进一步降低车辆油箱内用油被盗的概率,能及时提醒车主进行防卫,同时该装置摄取的信息能为或许公安机关的立案给予证据支持。