
轮腿式行走装置.pdf

醉香****mm


1/6
2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮腿式行走装置.pdf
本发明公开了一种轮腿式行走装置,包括有由固定连接在座臂上的座臂轴与应用机械机体上的座臂轴座组成的铰链机构;有由座臂,主动臂,被动臂和脚臂组成的四连杆机构;有安装在脚臂相应位置上的轮轴机构。由于本发明轮腿式行走装置能够控制所述的轮与应用机械机体的相对位置和能够控制所述的轮的正反转驱动,被动,制动,从而使本发明轮腿式行走装置具有较强的通过性和适应性,进而使应用机械更能适应在复杂地貌的环境中进行工作的要求。本发明轮腿式行走装置将在抢险救灾,探险,军工等领域得到广泛的应用。
一种轮腿式越障行走装置.pdf
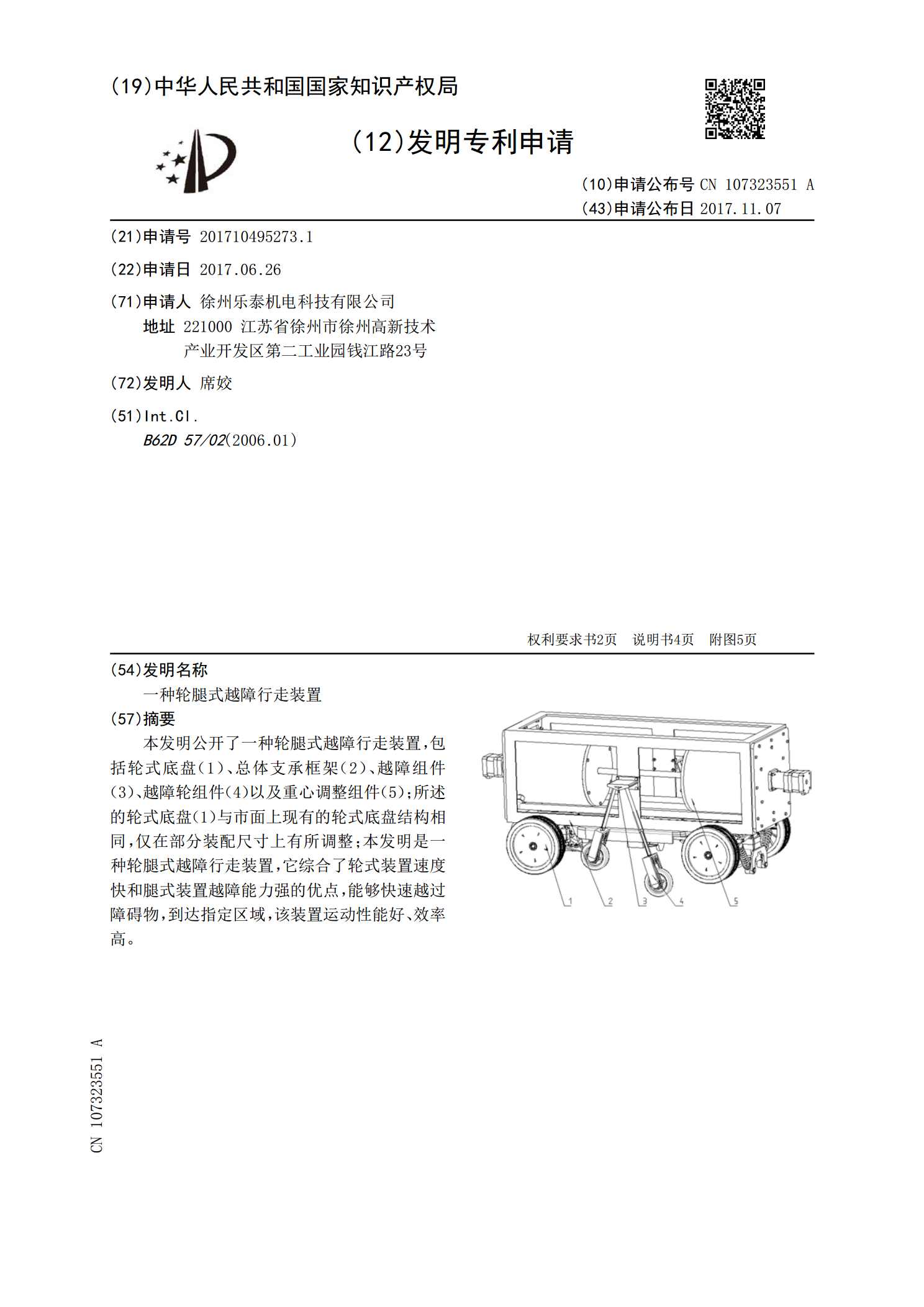
本发明公开了一种轮腿式越障行走装置,包括轮式底盘(1)、总体支承框架(2)、越障组件(3)、越障轮组件(4)以及重心调整组件(5);所述的轮式底盘(1)与市面上现有的轮式底盘结构相同,仅在部分装配尺寸上有所调整;本发明是一种轮腿式越障行走装置,它综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速越过障碍物,到达指定区域,该装置运动性能好、效率高。

轮腿式行走机构.pdf
本发明公开了一种轮腿式行走机构,包括C形结构的轮腿本体和设置于所述轮腿本体外表面的毛刺层;所述轮腿本体包括由轮腿本体的前端到末端依次设置的渐开线段、第二圆弧段和第一圆弧段,本行走机构能够解决弧形轮腿式机器人在启动步态中打滑和机器人重心上下波动的问题。
一种基于AUV的轮腿式行走装置.pdf
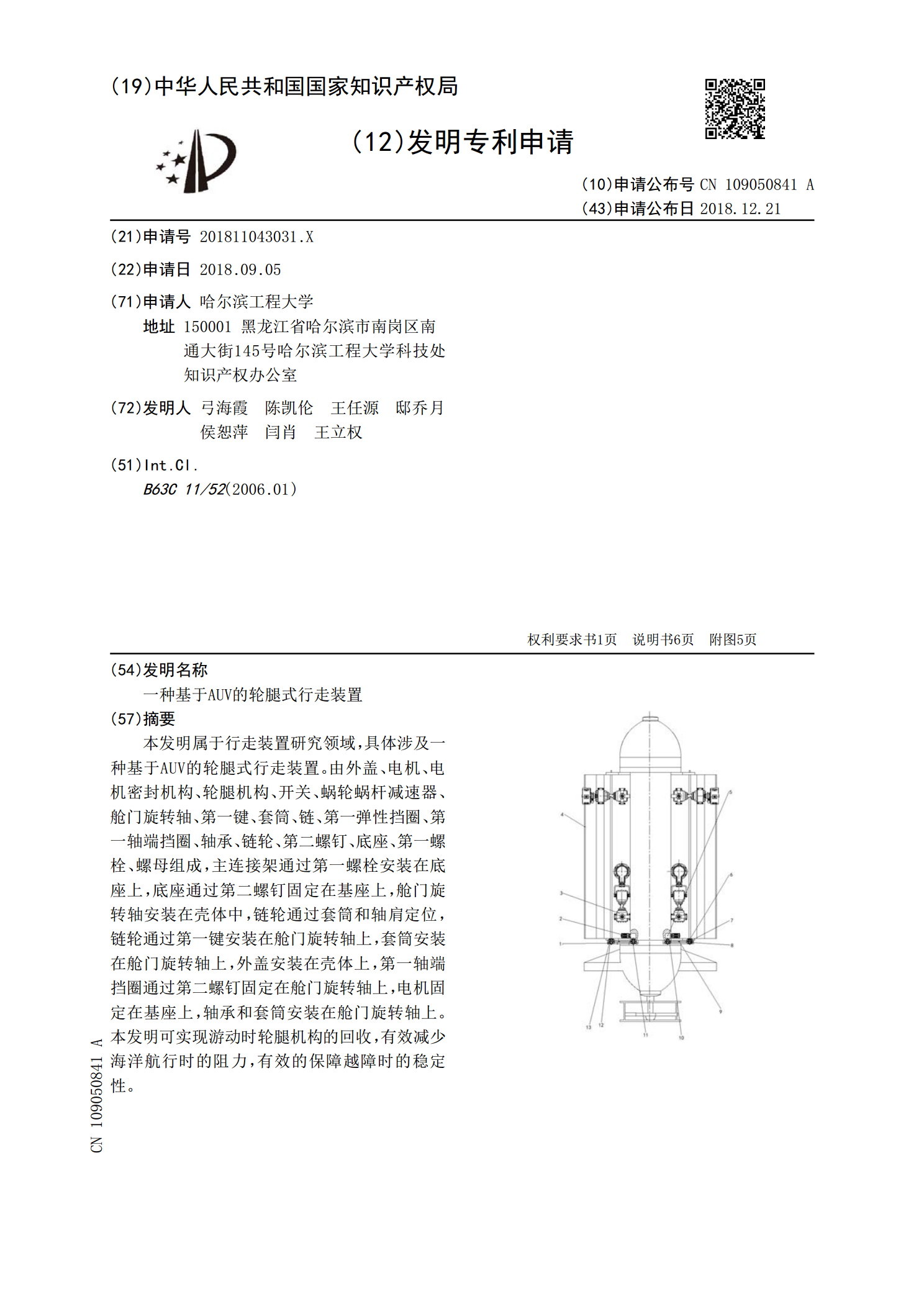
本发明属于行走装置研究领域,具体涉及一种基于AUV的轮腿式行走装置。由外盖、电机、电机密封机构、轮腿机构、开关、蜗轮蜗杆减速器、舱门旋转轴、第一键、套筒、链、第一弹性挡圈、第一轴端挡圈、轴承、链轮、第二螺钉、底座、第一螺栓、螺母组成,主连接架通过第一螺栓安装在底座上,底座通过第二螺钉固定在基座上,舱门旋转轴安装在壳体中,链轮通过套筒和轴肩定位,链轮通过第一键安装在舱门旋转轴上,套筒安装在舱门旋转轴上,外盖安装在壳体上,第一轴端挡圈通过第二螺钉固定在舱门旋转轴上,电机固定在基座上,轴承和套筒安装在舱门旋转轴

轮腿复合式轮系系统、行走装置及行走方法.pdf
本发明公开了一种轮腿复合式轮系系统、行走装置及行走方法,属于运动装置技术领域,所述轮系系统包括支腿,所述支腿包括可伸缩的连杆机构,所述连杆机构包括设置在连杆机构底侧、在连杆机构变形时为摇臂的第三连杆,还包括安装在第三连杆上的行走轮;所述行走轮包括第一滚轮及第二滚轮,所述第一滚轮安装在第三连杆的低端,第一滚轮及第二滚轮各自的支撑轮面均位于第三连杆的下方,在第三连杆摆动时,第一滚轮与第二滚轮的相对位置可转换为:第二滚轮的支撑轮面位于第一滚轮支撑轮面的上方。所述行走装置及行走方法均基于所述轮系系统。采用本方案提