
轮腿式行走机构.pdf

一只****写意

1/6
2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮腿式行走机构.pdf
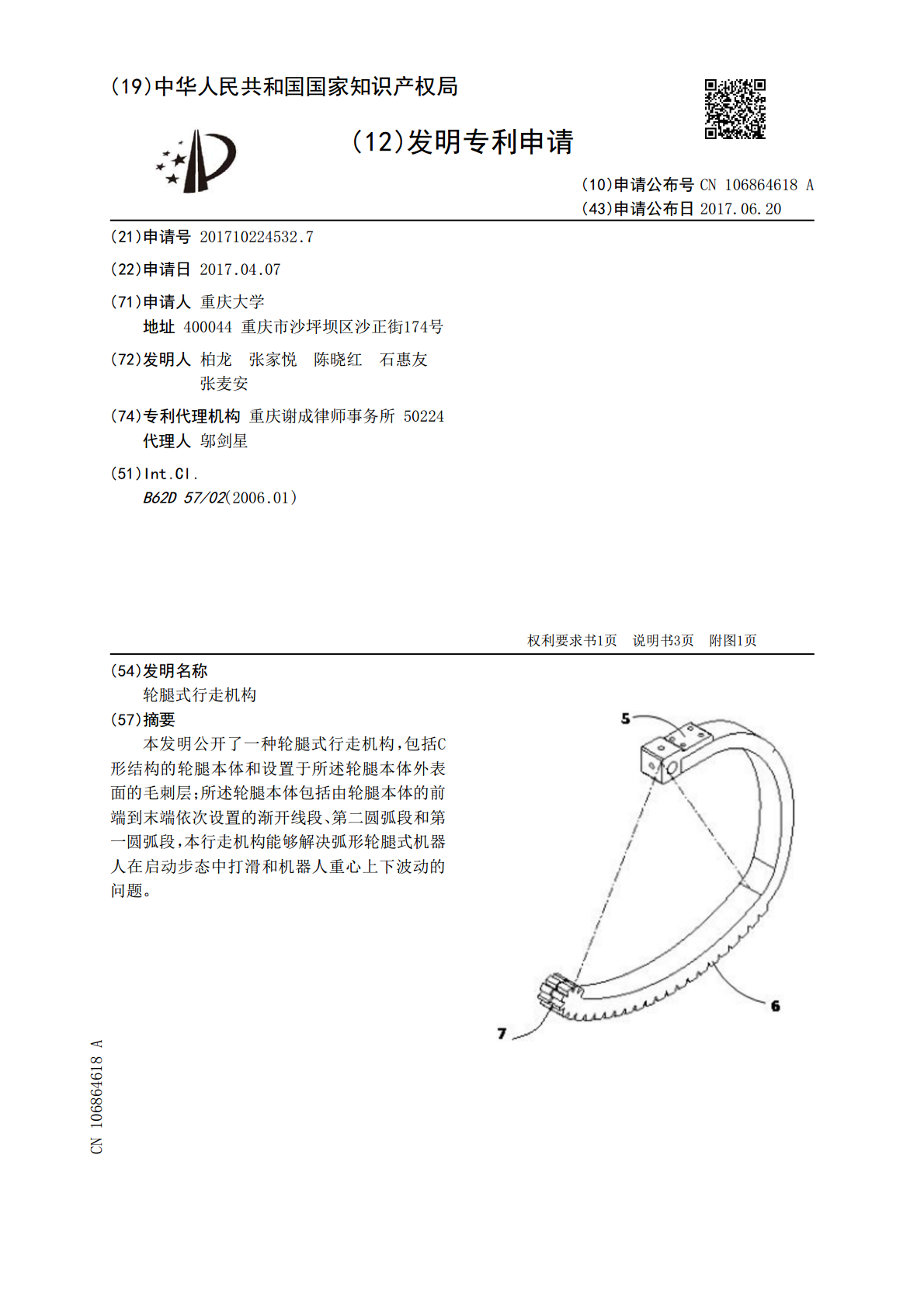
本发明公开了一种轮腿式行走机构,包括C形结构的轮腿本体和设置于所述轮腿本体外表面的毛刺层;所述轮腿本体包括由轮腿本体的前端到末端依次设置的渐开线段、第二圆弧段和第一圆弧段,本行走机构能够解决弧形轮腿式机器人在启动步态中打滑和机器人重心上下波动的问题。

拉杆式悬挂的机器人轮腿行走机构.pdf
本发明提供了一种拉杆式悬挂的机器人轮腿行走机构,包括:车架、拉杆摇臂差速悬架系统、左轮腿系统和右轮腿系统,拉杆摇臂差速悬架系统包括旋转臂组件、左拉杆、右拉杆、左摇臂、右摇臂和若干连接件,旋转臂组件包括中间旋转轴和旋转臂,中间旋转轴通过轴承与车架连接,旋转臂与中间旋转轴连接,且其两端分别通过连接件与左拉杆和右拉杆的一端连接,左拉杆和右拉杆的另一端通过连接件分别与左摇臂和右摇臂连接,左摇臂和右摇臂分别通过轴承连接至设置在车架左右两侧的左轮腿系统和右轮腿系统。本发明具有高效、稳定,且越障性能好、重量小的优点。

仿生六轮腿行走机构.pdf
本发明公开了一种仿生六轮腿行走机构,旨在克服目前采用了很多传感器和复杂控制逻辑的问题。其包括前车架、前传动部分、转向总成、后车架、后传动部分、中部自由度装置和轮腿。前传动部分安装在前车架上,后传动部分安装在后车架上,中部自由度装置固定于后车架前端中部,前车架后端与后车架前端采用中部自由度连接杆将两者转动连接,前左轮腿与前右轮腿依次安装在前传动部分中的前轴的左端与右端,中左轮腿与中右轮腿依次安装在后传动部分中的中间轴的左端与右端,后左轮腿与后右轮腿依次安装在后传动部分中的后轴的左端与右端。转向总成的舵机安装

仿生六轮腿全驱动行走机构.pdf
本发明公开了一种仿生六轮腿全驱动行走机构,旨在克服现有技术采用很多传感器和复杂控制逻辑的问题。全驱动行走机构的轮腿行走机械部分包括前车架、后车架、中部自由度关节装置、轮腿与驱动组合体。轮腿是指前左轮腿、中左轮腿、后左轮腿、后右轮腿、中右轮腿与前右轮腿;驱动组合体是指前左驱动组合体、中左驱动组合体、后左驱动组合体、后右驱动组合体、中右驱动组合体与前右驱动组合体。中部自由度关节装置安装于后车架前底板中间位置,前车架后端与后车架前端转动连接,前左驱动组合体与前右驱动组合体安装在前车架前左右处和两前轮腿连接,中左

一种轮腿复合式越障行走机构.pdf
本发明提供一种轮腿复合式越障行走机构,属于车辆行走技术领域。本发明的越障行走机构包括驱动齿轮、车轮支架、车轮、左驱动轴、右驱动轴、第一单向端齿环、双向端齿环、第二单向端齿环、压缩弹簧、盘形力矩传感器、第一环形电磁吸盘、第二环形电磁吸盘、第一圆柱齿轮、第二圆柱齿轮、转臂轴、转臂箱体、第一转臂齿轮、第二转臂齿轮、越障轴、越障杆、第一回位弹簧以及第二回位弹簧。该行走机构中的双向端齿环在盘形力矩传感器、第一环形电磁吸盘、第二环形电磁吸盘和压缩弹簧的作用下利用花键副实现轴向移动,可以分别与第一单向端齿环或第二单向端