
紧凑的电动凸轮相位器.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
紧凑的电动凸轮相位器.pdf
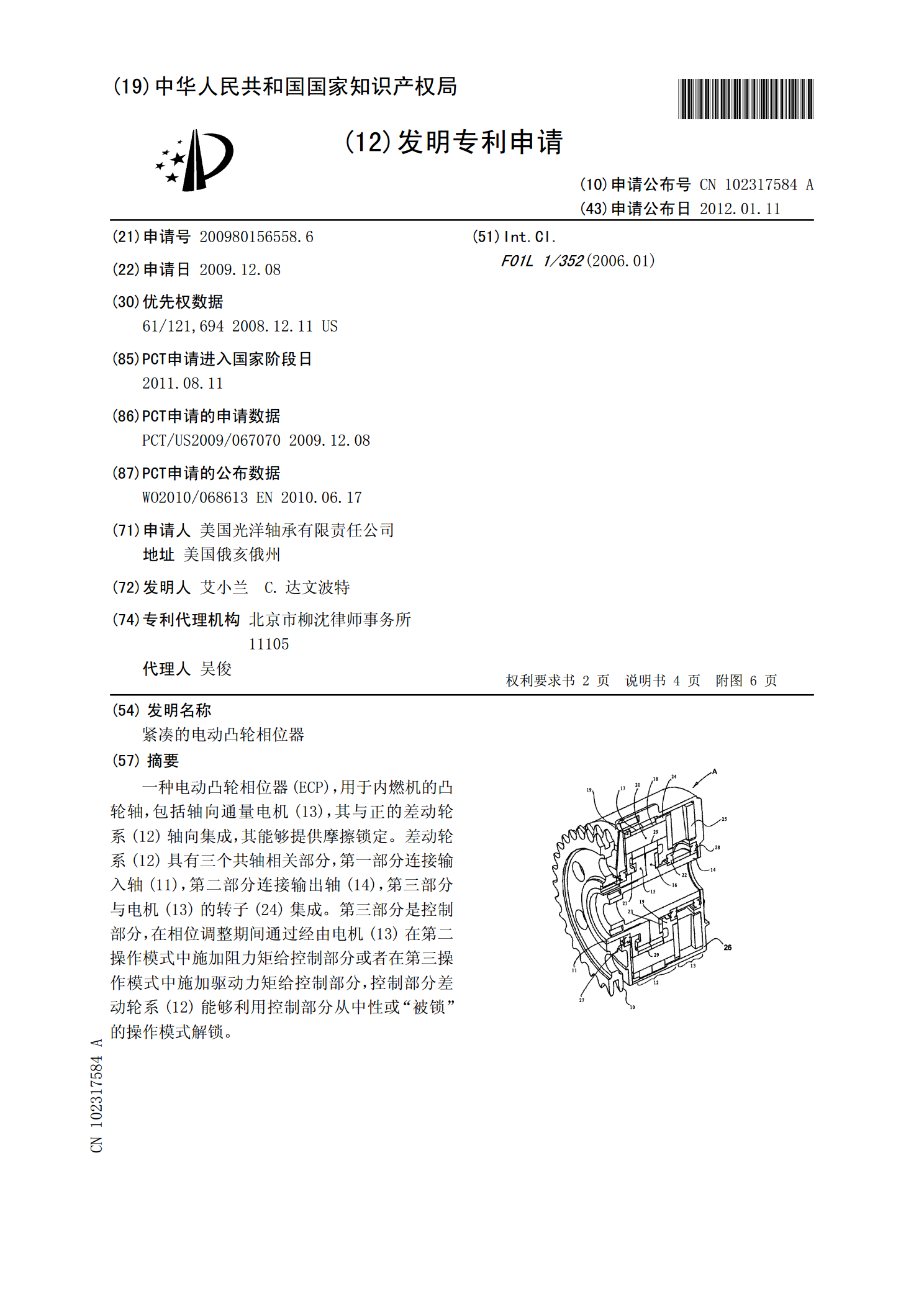
一种电动凸轮相位器(ECP),用于内燃机的凸轮轴,包括轴向通量电机(13),其与正的差动轮系(12)轴向集成,其能够提供摩擦锁定。差动轮系(12)具有三个共轴相关部分,第一部分连接输入轴(11),第二部分连接输出轴(14),第三部分与电机(13)的转子(24)集成。第三部分是控制部分,在相位调整期间通过经由电机(13)在第二操作模式中施加阻力矩给控制部分或者在第三操作模式中施加驱动力矩给控制部分,控制部分差动轮系(12)能够利用控制部分从中性或“被锁”的操作模式解锁。
凸轮相位器的致动器和凸轮轴的凸轮相位器.pdf
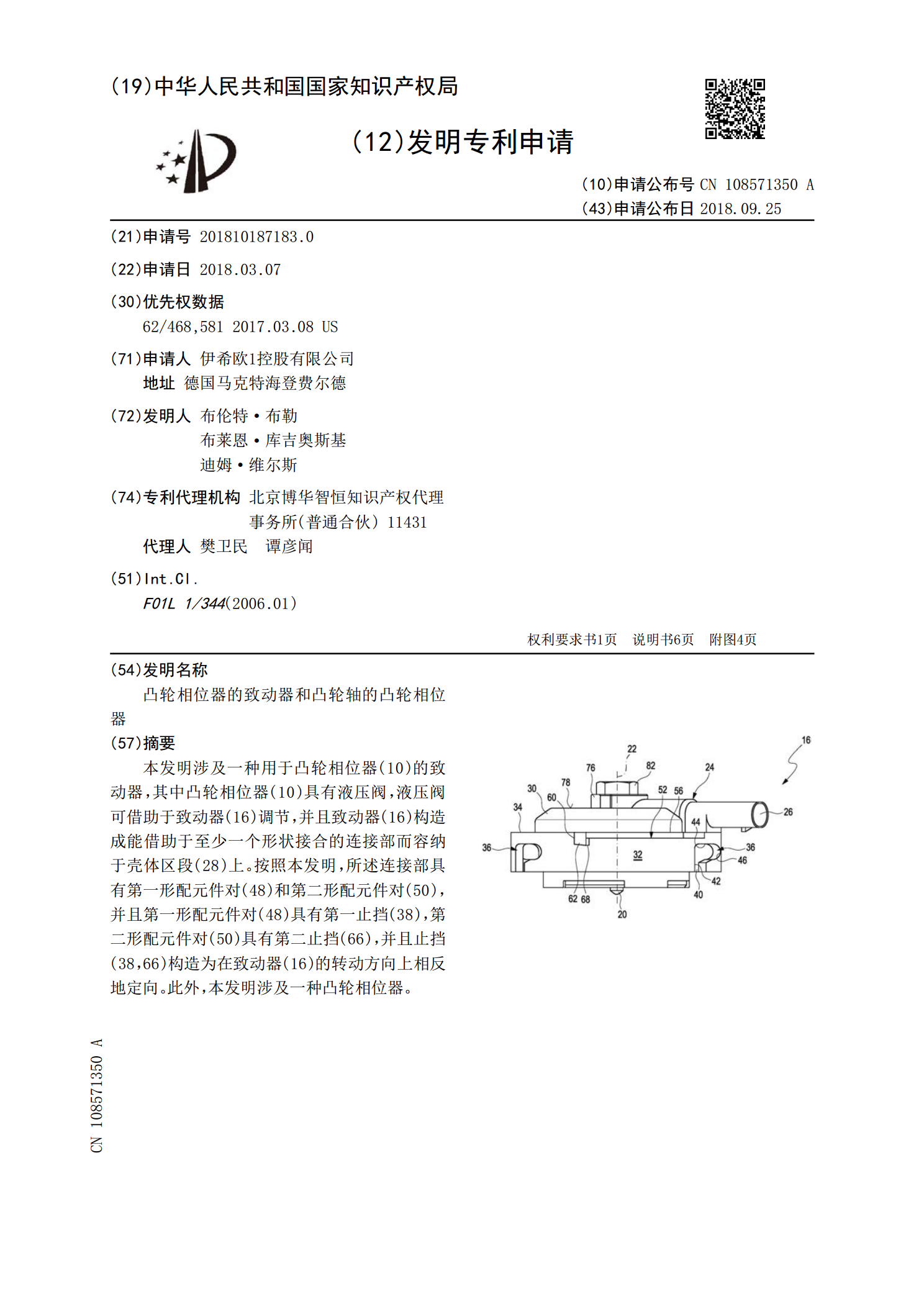
本发明涉及一种用于凸轮相位器(10)的致动器,其中凸轮相位器(10)具有液压阀,液压阀可借助于致动器(16)调节,并且致动器(16)构造成能借助于至少一个形状接合的连接部而容纳于壳体区段(28)上。按照本发明,所述连接部具有第一形配元件对(48)和第二形配元件对(50),并且第一形配元件对(48)具有第一止挡(38),第二形配元件对(50)具有第二止挡(66),并且止挡(38,66)构造为在致动器(16)的转动方向上相反地定向。此外,本发明涉及一种凸轮相位器。

电动凸轮相位器控制系统和方法.pdf
本发明涉及电动凸轮相位器控制系统和方法。具体地,提供了一种用于发动机的系统,其包括马达驱动器模块、目标相位角模块和相关性控制模块。所述马达驱动器模块基于由曲轴位置和凸轮轴位置限定的目标角来控制凸轮轴相位器的电动马达。所述目标相位角模块在减速燃料切断DFCO事件之前选择性地将所述目标角设置为第一相位角,并且在DFCO事件期间选择性地使所述目标角转变为预定相位角。所述相关性控制模块在DFCO事件期间选择性地将所述曲轴位置的值与预定曲轴位置范围进行比较。

电动马达驱动的简易行星凸轮相位器.pdf
一种凸轮相位器(10)动态地调整一个内燃发动机的凸轮轴(24)相对于发动机曲轴(34)的旋转关系。一个凸轮链轮(20)可以由连接到主动链轮(36)上的一个无限循环动力传输构件驱动,该主动链轮被安装用于与该发动机5曲轴(34)一起旋转。该凸轮相位器(10)可以包括一个行星齿轮传动系(12),该行星齿轮传动系具有:一个可连接用于与该凸轮链轮(20)一起旋转的位于中心的太阳轮(14),一个可连接用于与凸轮轴(24)一起旋转的环形齿轮(18),以及由啮合接合在该太阳轮(14)与该环形齿轮(18)之间的一个载体(2
凸轮相位器.pdf
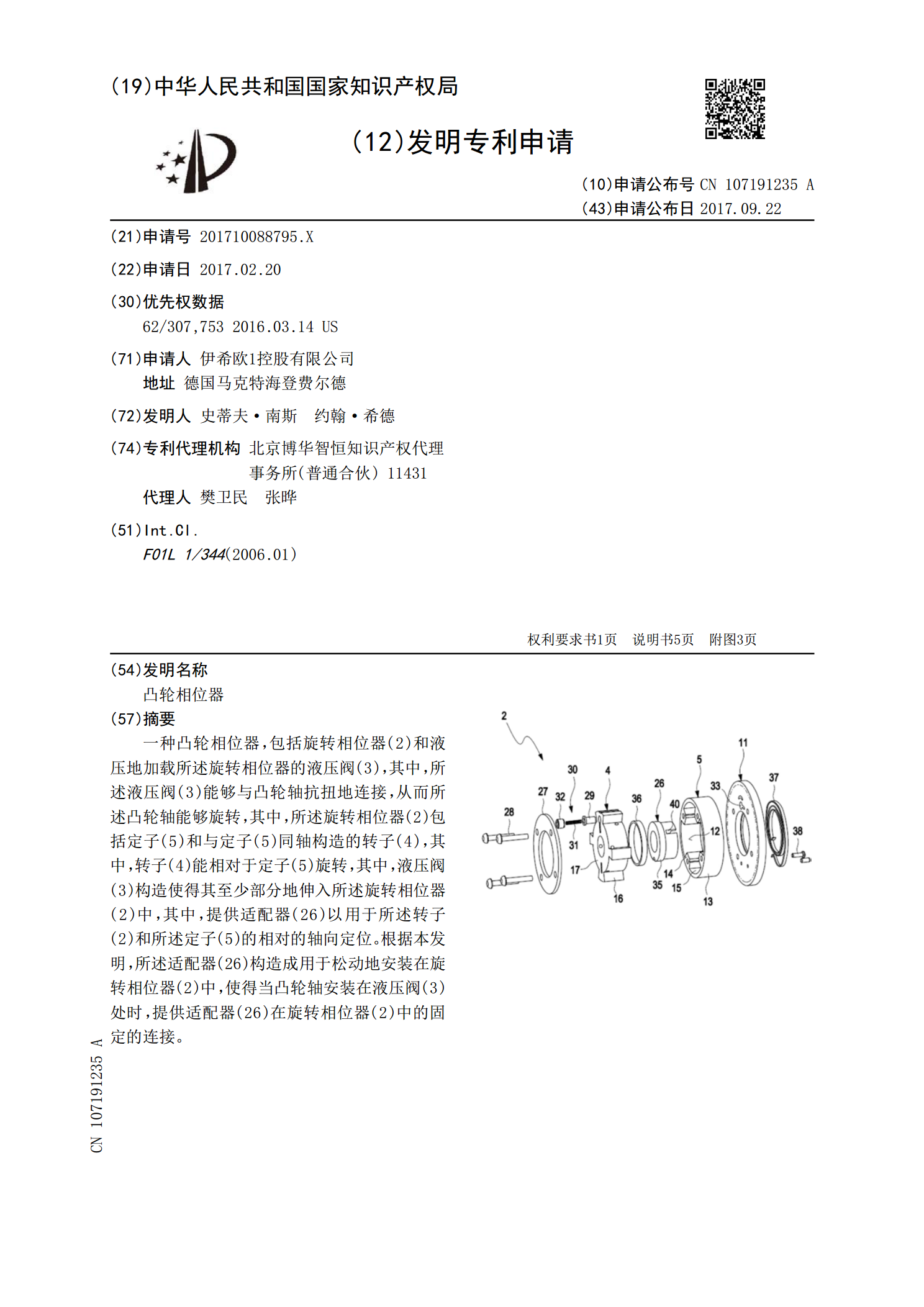
一种凸轮相位器,包括旋转相位器(2)和液压地加载所述旋转相位器的液压阀(3),其中,所述液压阀(3)能够与凸轮轴抗扭地连接,从而所述凸轮轴能够旋转,其中,所述旋转相位器(2)包括定子(5)和与定子(5)同轴构造的转子(4),其中,转子(4)能相对于定子(5)旋转,其中,液压阀(3)构造使得其至少部分地伸入所述旋转相位器(2)中,其中,提供适配器(26)以用于所述转子(2)和所述定子(5)的相对的轴向定位。根据本发明,所述适配器(26)构造成用于松动地安装在旋转相位器(2)中,使得当凸轮轴安装在液压阀(3)