
用于汽车线控转向系统的控制方法.pdf

玄静****写意

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于汽车线控转向系统的控制方法.pdf
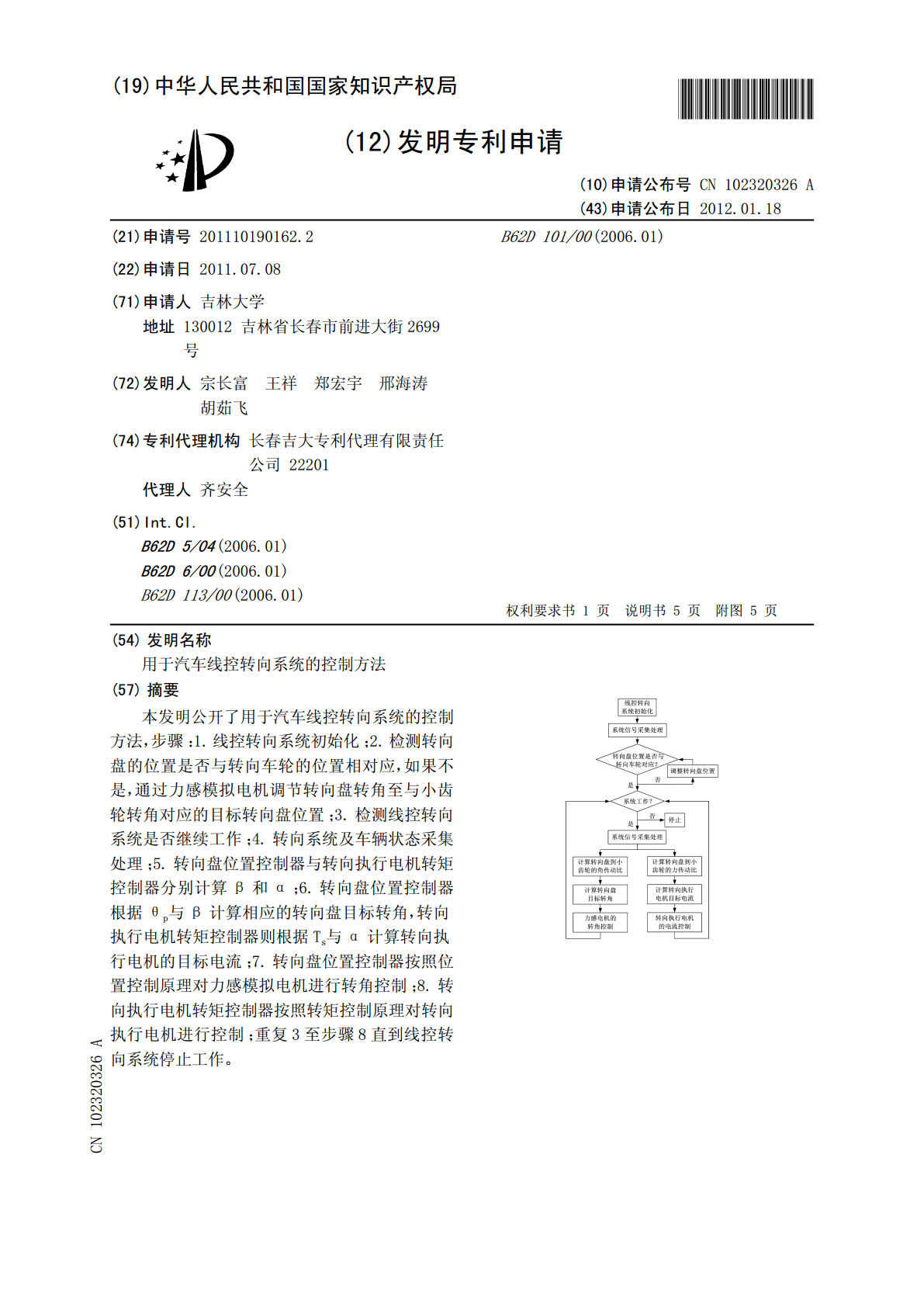
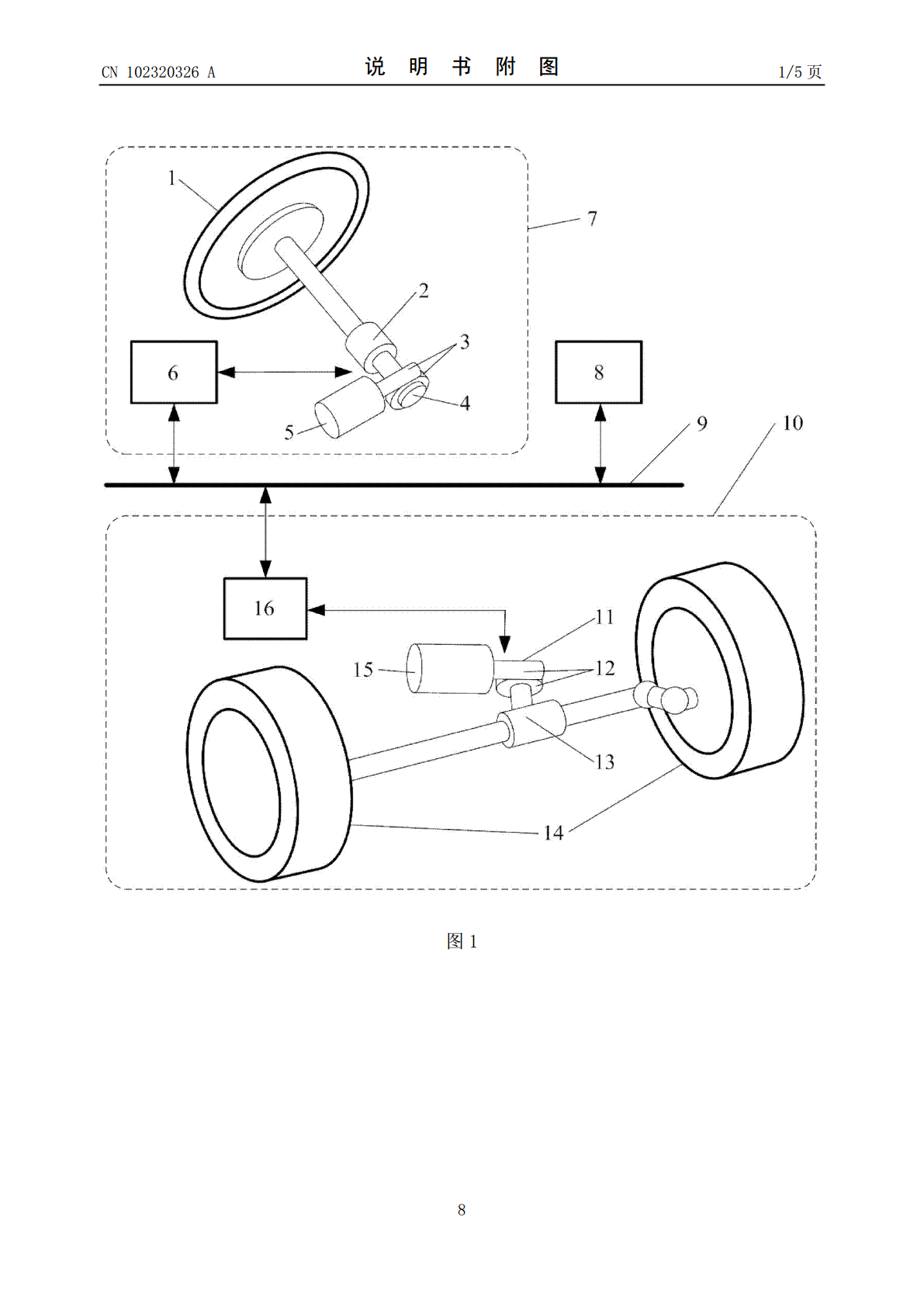
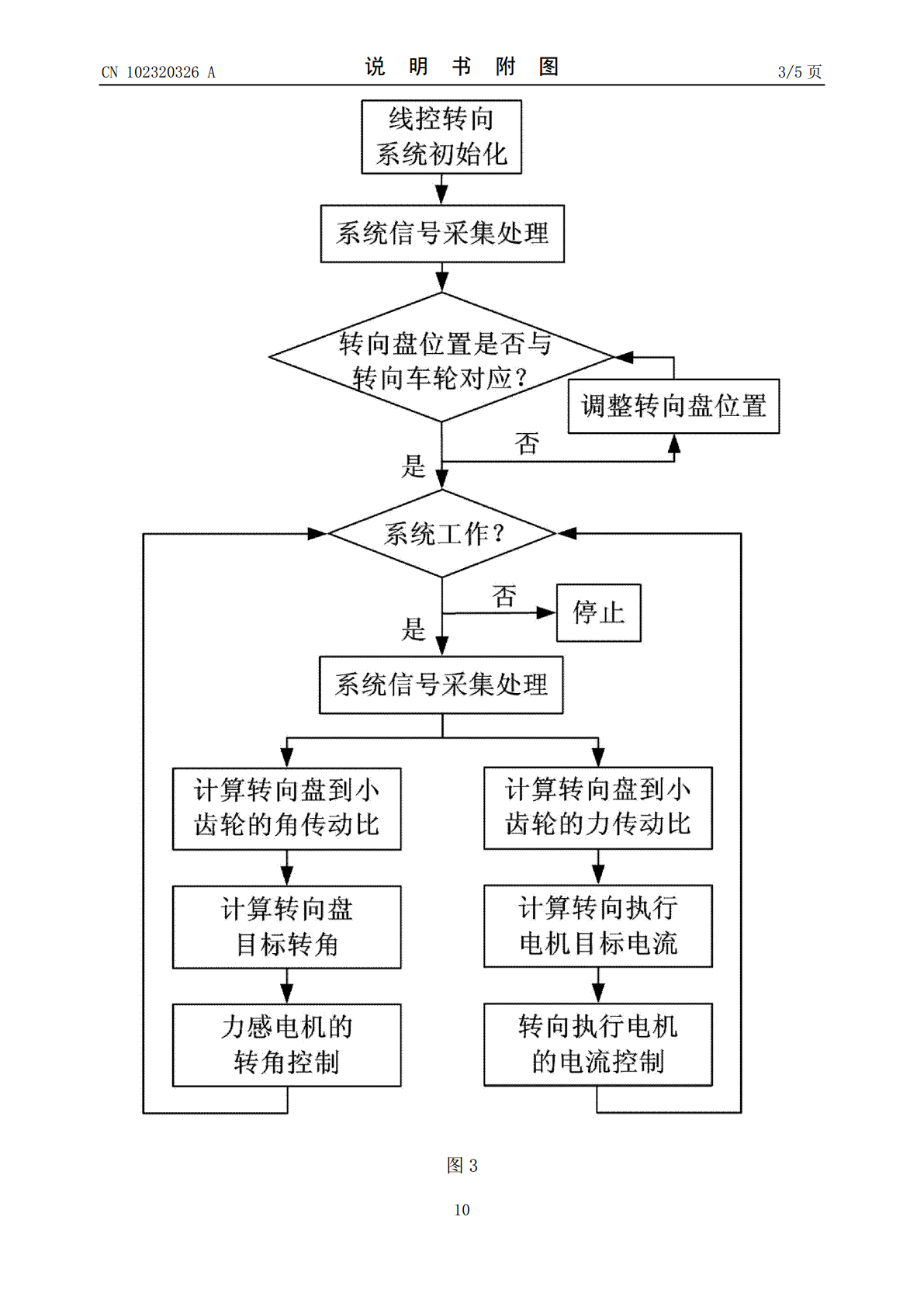
本发明公开了用于汽车线控转向系统的控制方法,步骤:1.线控转向系统初始化;2.检测转向盘的位置是否与转向车轮的位置相对应,如果不是,通过力感模拟电机调节转向盘转角至与小齿轮转角对应的目标转向盘位置;3.检测线控转向系统是否继续工作;4.转向系统及车辆状态采集处理;5.转向盘位置控制器与转向执行电机转矩控制器分别计算β和α;6.转向盘位置控制器根据θp与β计算相应的转向盘目标转角,转向执行电机转矩控制器则根据Ts与α计算转向执行电机的目标电流;7.转向盘位置控制器按照位置控制原理对力感模拟电机进行转角控制;
用于线控转向系统的转向控制方法和装置.pdf
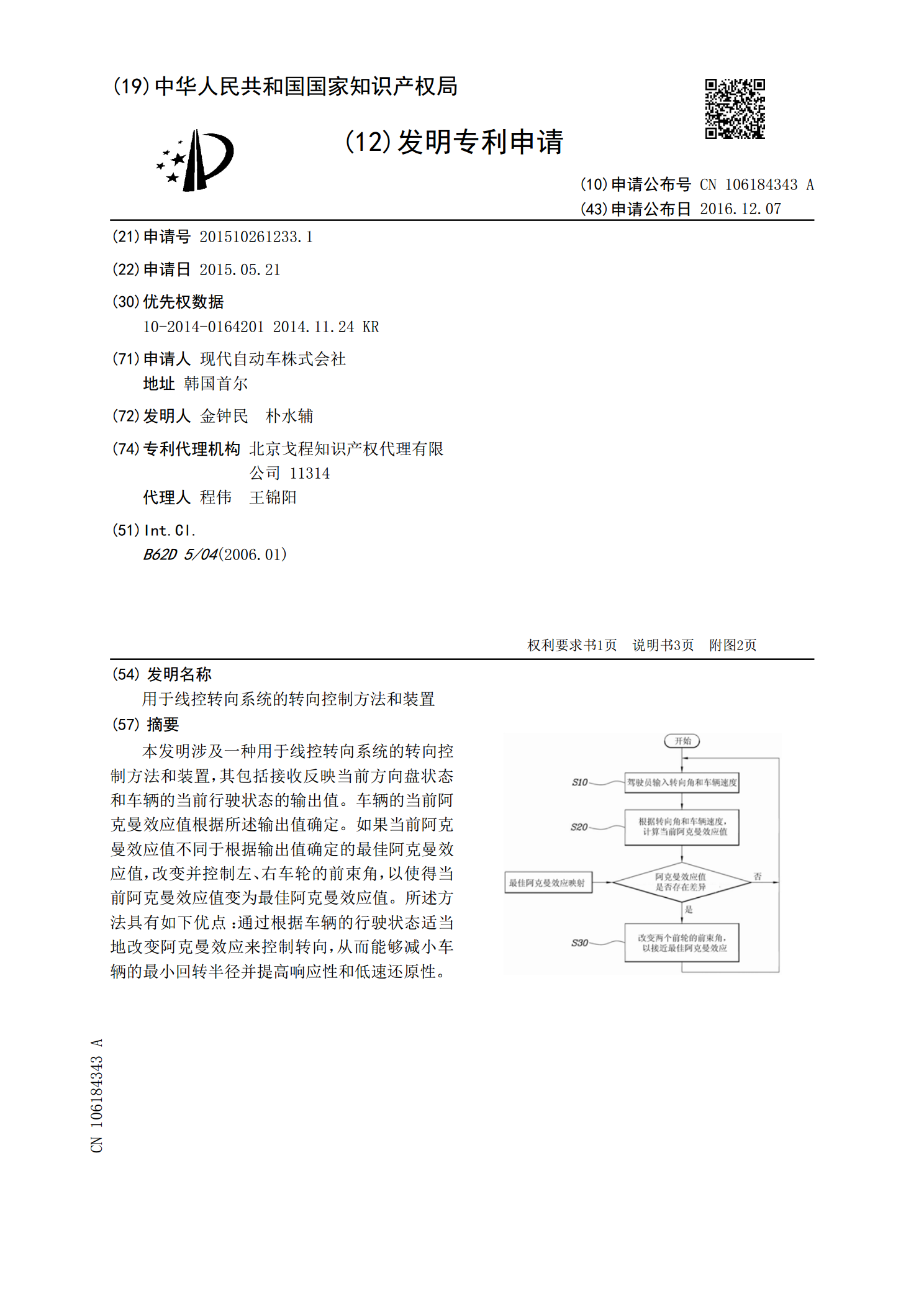
本发明涉及一种用于线控转向系统的转向控制方法和装置,其包括接收反映当前方向盘状态和车辆的当前行驶状态的输出值。车辆的当前阿克曼效应值根据所述输出值确定。如果当前阿克曼效应值不同于根据输出值确定的最佳阿克曼效应值,改变并控制左、右车轮的前束角,以使得当前阿克曼效应值变为最佳阿克曼效应值。所述方法具有如下优点:通过根据车辆的行驶状态适当地改变阿克曼效应来控制转向,从而能够减小车辆的最小回转半径并提高响应性和低速还原性。

控制线控转向的转向系统的方法和用于机动车辆的线控转向的转向系统.pdf
本发明涉及控制用于机动车辆的线控转向的转向系统(1)的方法,线控转向的转向系统(1)包括:可电控转向控制器(2),可电控转向控制器(2)作用于转向轮并且检测转向轮的实际转向角(α);反馈致动器,反馈致动器检测利用方向盘设置的目标转向角(β);以及致动单元(4),致动单元(4)根据目标转向角(β)和实际转向角(α)、使用受限扭矩请求信号(PT
线控转向系统和线控转向系统的控制方法.pdf
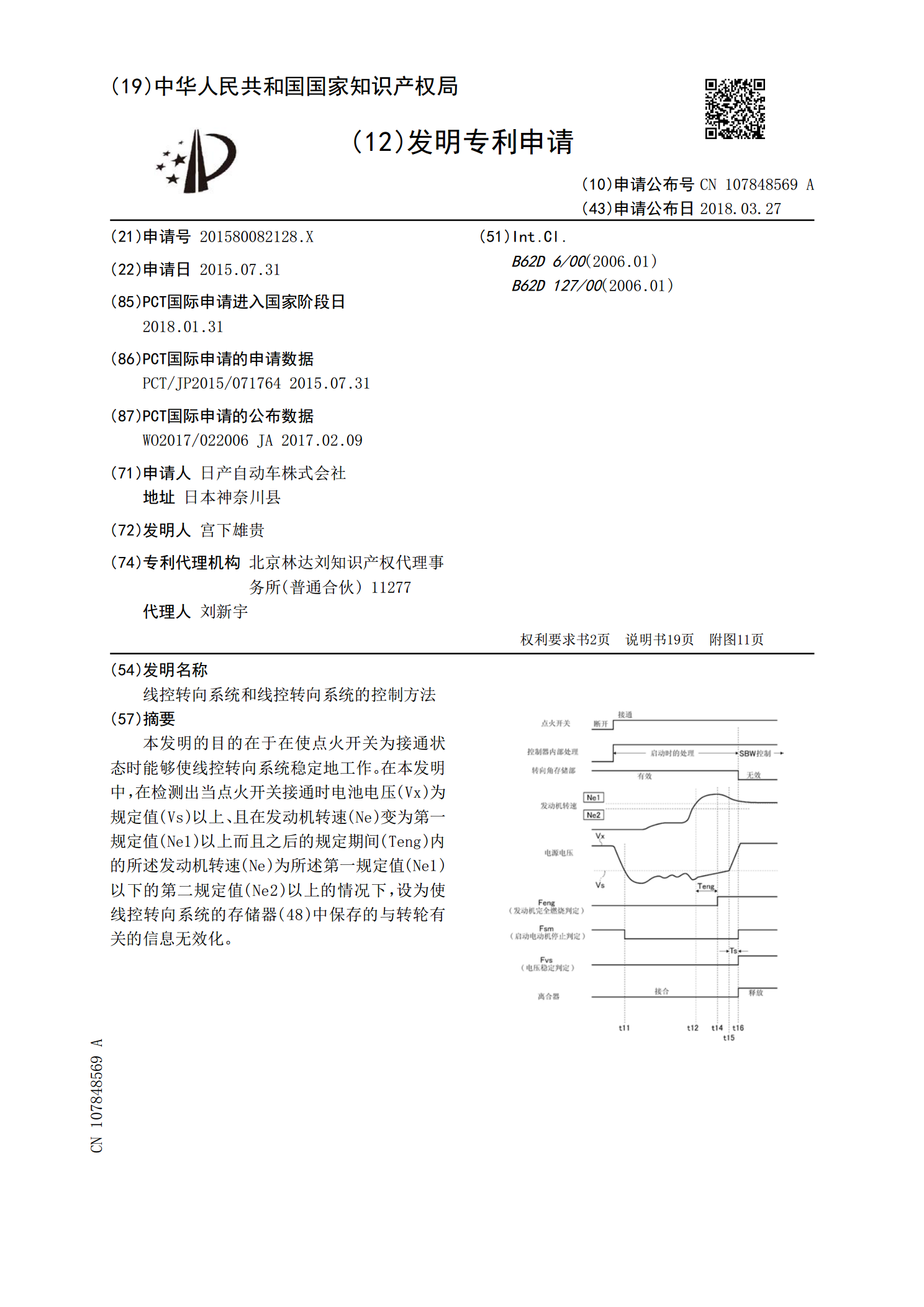
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。

汽车线控转向系统转向控制研究.docx
汽车线控转向系统转向控制研究随着汽车整体科技水平的不断提高,汽车的各种功能和系统也在不断更新和升级。其中,汽车线控转向系统是汽车中非常重要的一个系统之一,可以让驾驶者更加方便地控制车辆行驶方向,提高驾驶安全性和驾驶体验。本文将围绕该主题展开深入讨论,并探讨其发展现状以及未来的发展趋势。一、汽车线控转向系统概述汽车线控转向系统(Steer-by-wire,简称SBW)是一种新型的汽车驾驶系统,也称为电子控制系统或电子转向系统。它主要通过电子信号来控制车辆的方向盘转动,从而实现对汽车的转向控制。相比传统的液压