
可展轮式移动机器人.pdf

宜欣****外呢


1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可展轮式移动机器人.pdf
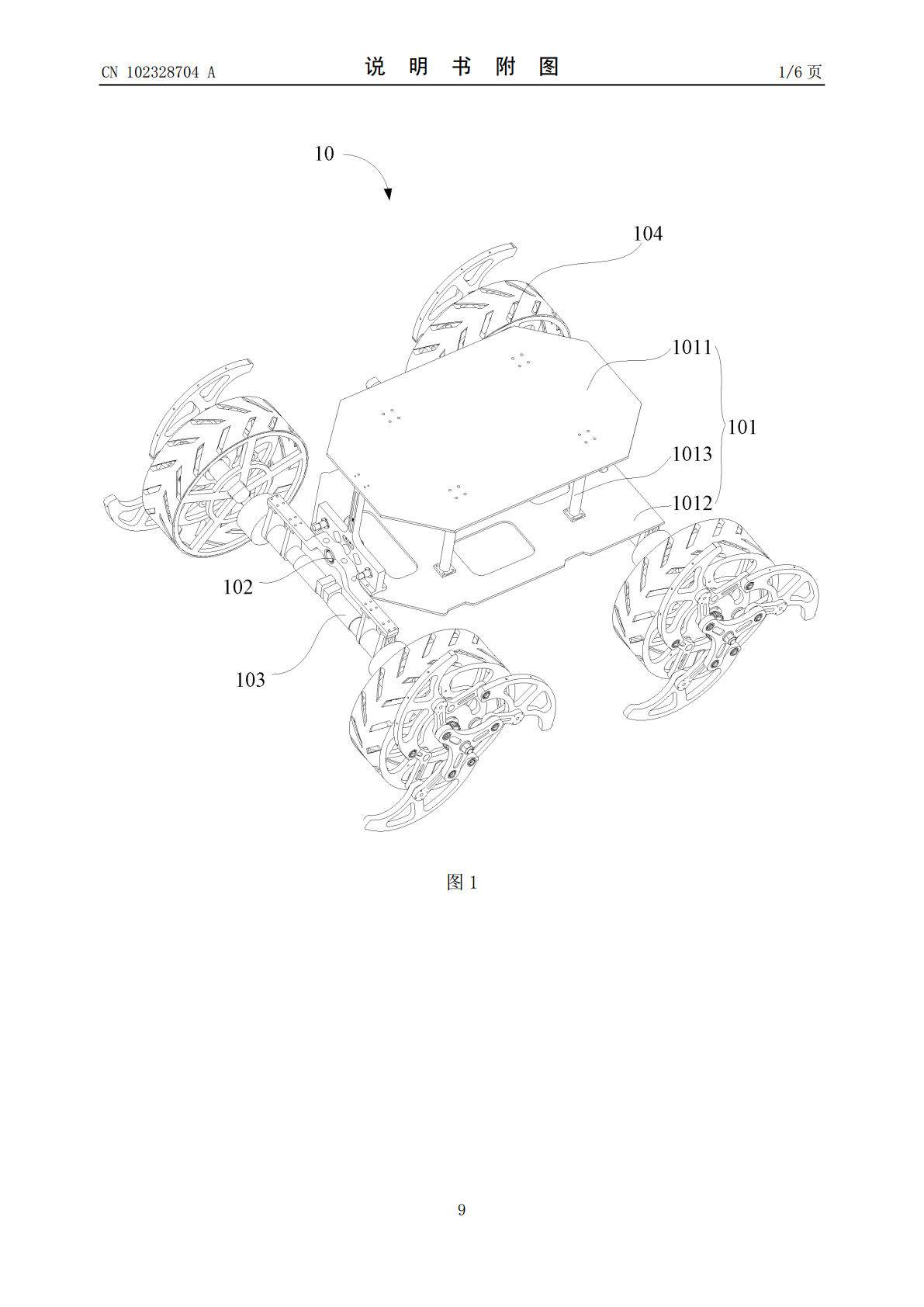
一种可展轮式移动机器人,包括车架、能相对车架摆动的摆动悬架组件、分别可转动地连接于摆动悬架组件两端的四个驱动轴组件、分别固定连接于四个驱动轴组件,使车轮组相对于车架可转动的四个车轮组。每个车轮组包括圆柱形的正常车轮、三个可展轮缘、三个二叉杆及驱动件。每个可展轮缘为弓形,且具有两个轴承孔。三个二叉杆围绕正常车轮的轴心设置,每个二叉杆具有两个自由端及一个弯折部,弯折部可转动地连接于正常车轮的外侧,每个二叉杆的两个自由端分别与其中一个可展轮缘中间轴承孔及相邻可展轮缘的边缘轴承孔可转动地连接。驱动件驱动三个二叉杆
轮式移动机器人.pdf
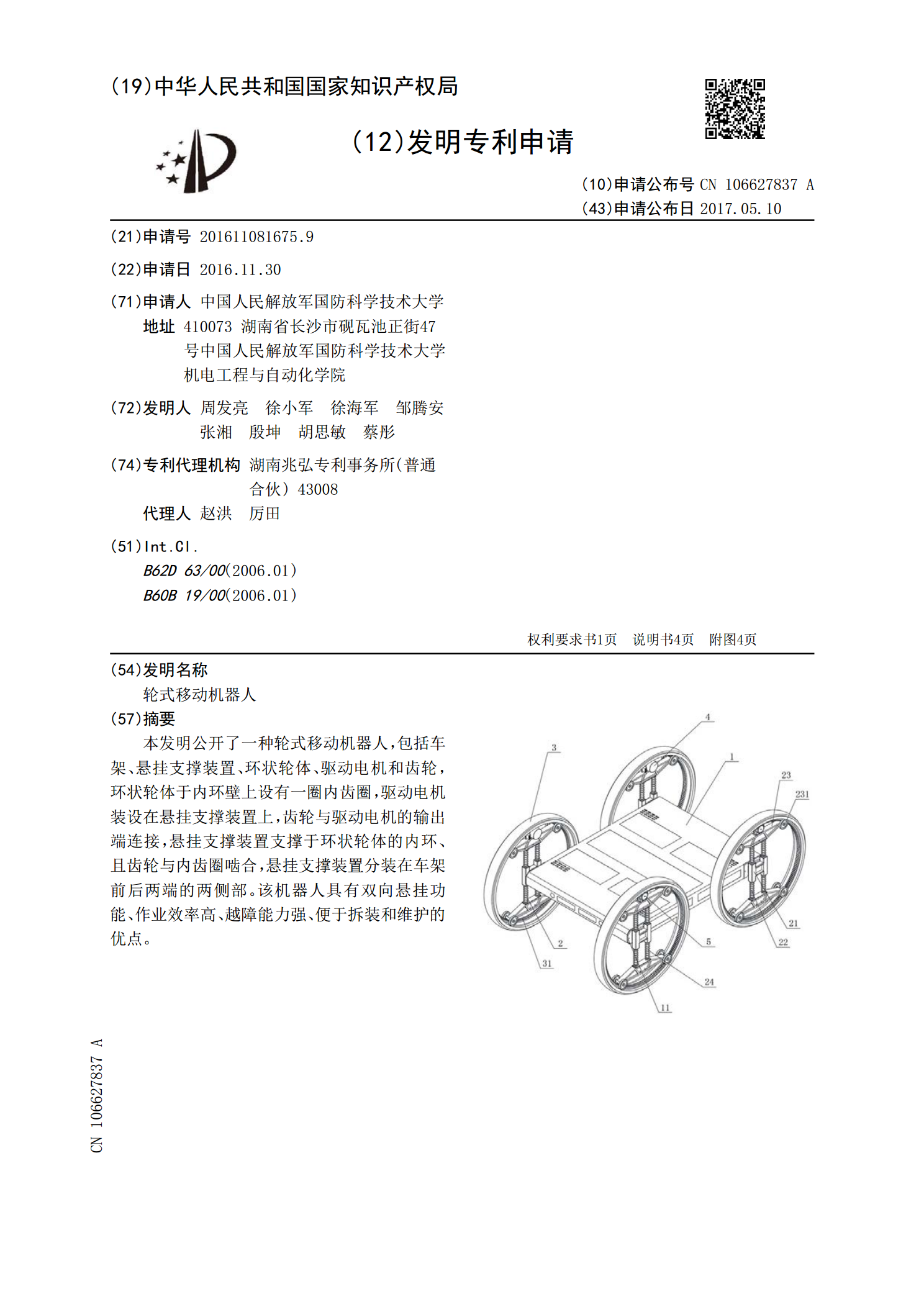
本发明公开了一种轮式移动机器人,包括车架、悬挂支撑装置、环状轮体、驱动电机和齿轮,环状轮体于内环壁上设有一圈内齿圈,驱动电机装设在悬挂支撑装置上,齿轮与驱动电机的输出端连接,悬挂支撑装置支撑于环状轮体的内环、且齿轮与内齿圈啮合,悬挂支撑装置分装在车架前后两端的两侧部。该机器人具有双向悬挂功能、作业效率高、越障能力强、便于拆装和维护的优点。
轮式可移动设备的车轮和轮式可移动设备.pdf
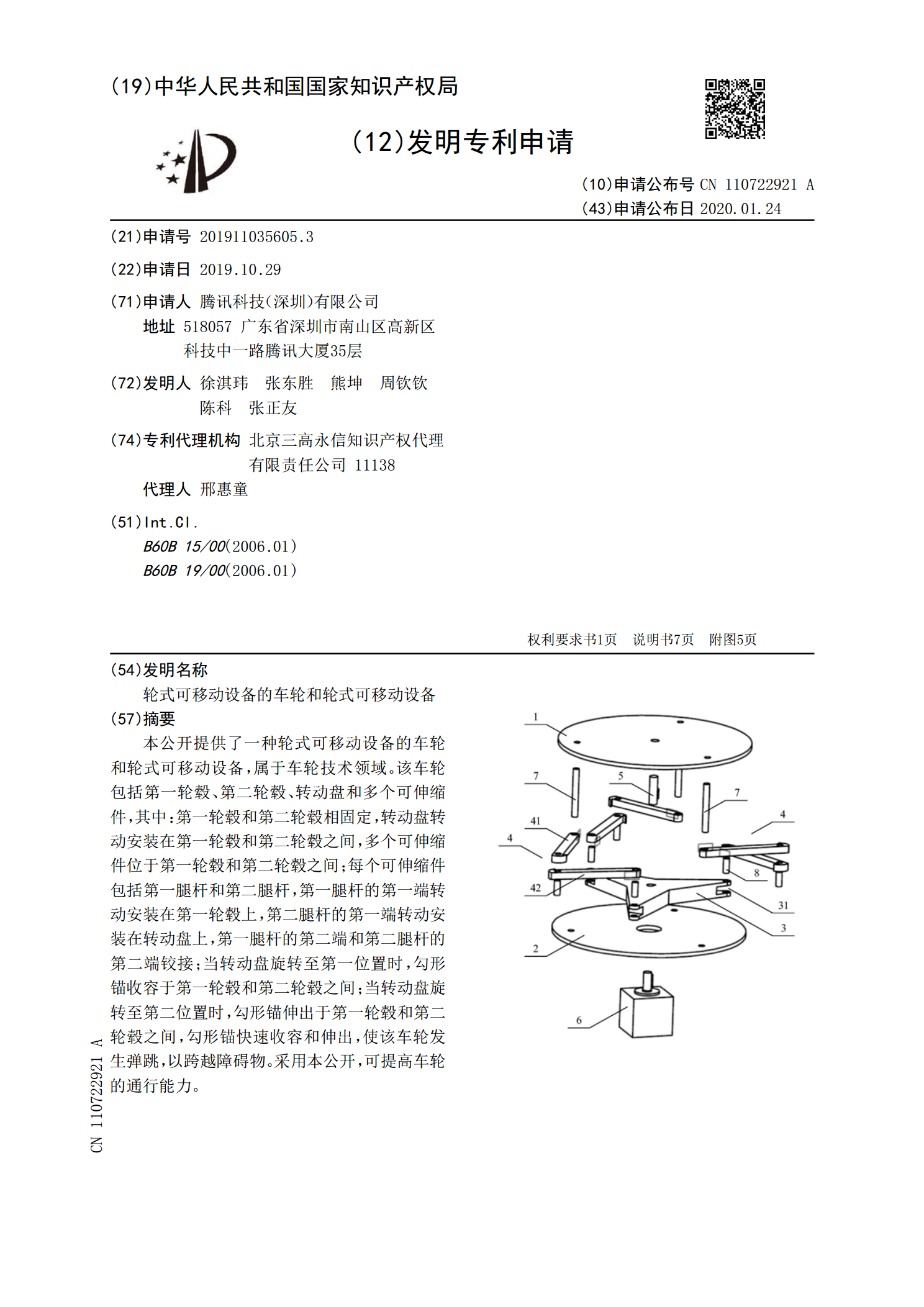
本公开提供了一种轮式可移动设备的车轮和轮式可移动设备,属于车轮技术领域。该车轮包括第一轮毂、第二轮毂、转动盘和多个可伸缩件,其中:第一轮毂和第二轮毂相固定,转动盘转动安装在第一轮毂和第二轮毂之间,多个可伸缩件位于第一轮毂和第二轮毂之间;每个可伸缩件包括第一腿杆和第二腿杆,第一腿杆的第一端转动安装在第一轮毂上,第二腿杆的第一端转动安装在转动盘上,第一腿杆的第二端和第二腿杆的第二端铰接;当转动盘旋转至第一位置时,勾形锚收容于第一轮毂和第二轮毂之间;当转动盘旋转至第二位置时,勾形锚伸出于第一轮毂和第二轮毂之间,

轮式移动机器人悬挂装置.pdf
本发明公开了轮式移动机器人悬挂装置,底盘(1)上开有用于穿过两个车轮(11)的两个第一通孔,两所述第一通孔之间的所述底盘(1)中部固定设置有两支撑座(2),两所述支撑座(2)相对设置且其上水平设置有用于穿过旋转轴(6)的两第二通孔,两所述旋转轴(6)分别与车轮支架(7)的一端固定连接,两所述车轮支架(7)的另一端分别与两所述车轮(11)相连,两所述车轮支架(7)之间设置有间隙,两所述车轮支架(7)的相对端均设置有板簧(4)。本发明提供的轮式移动机器人悬挂装置,缓解车轮振动引起的机器人颠簸,提高机器人行驶的

轮式移动机器人的运动控制.pdf