
轮式可移动设备的车轮和轮式可移动设备.pdf

黛娥****ak


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮式可移动设备的车轮和轮式可移动设备.pdf
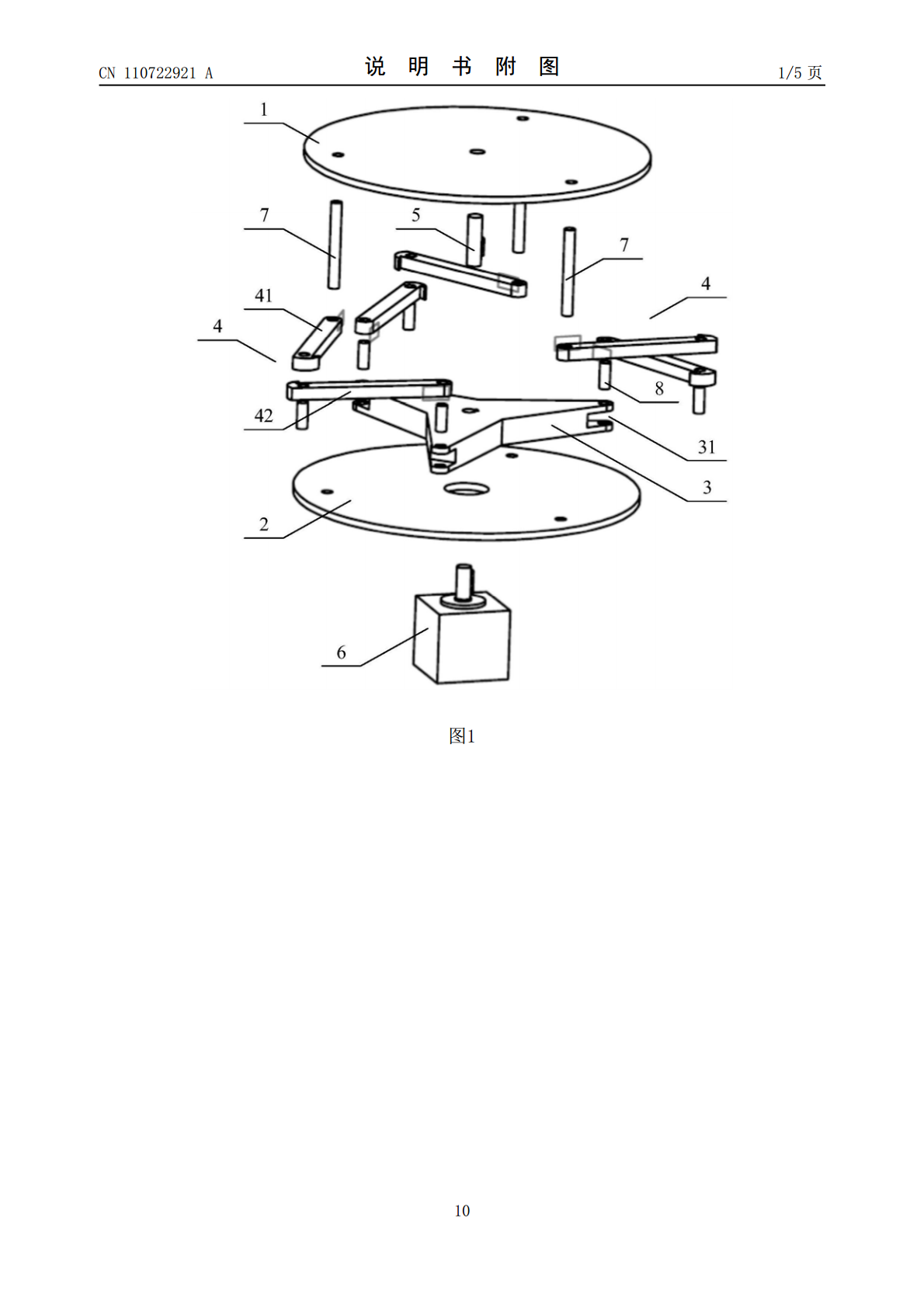
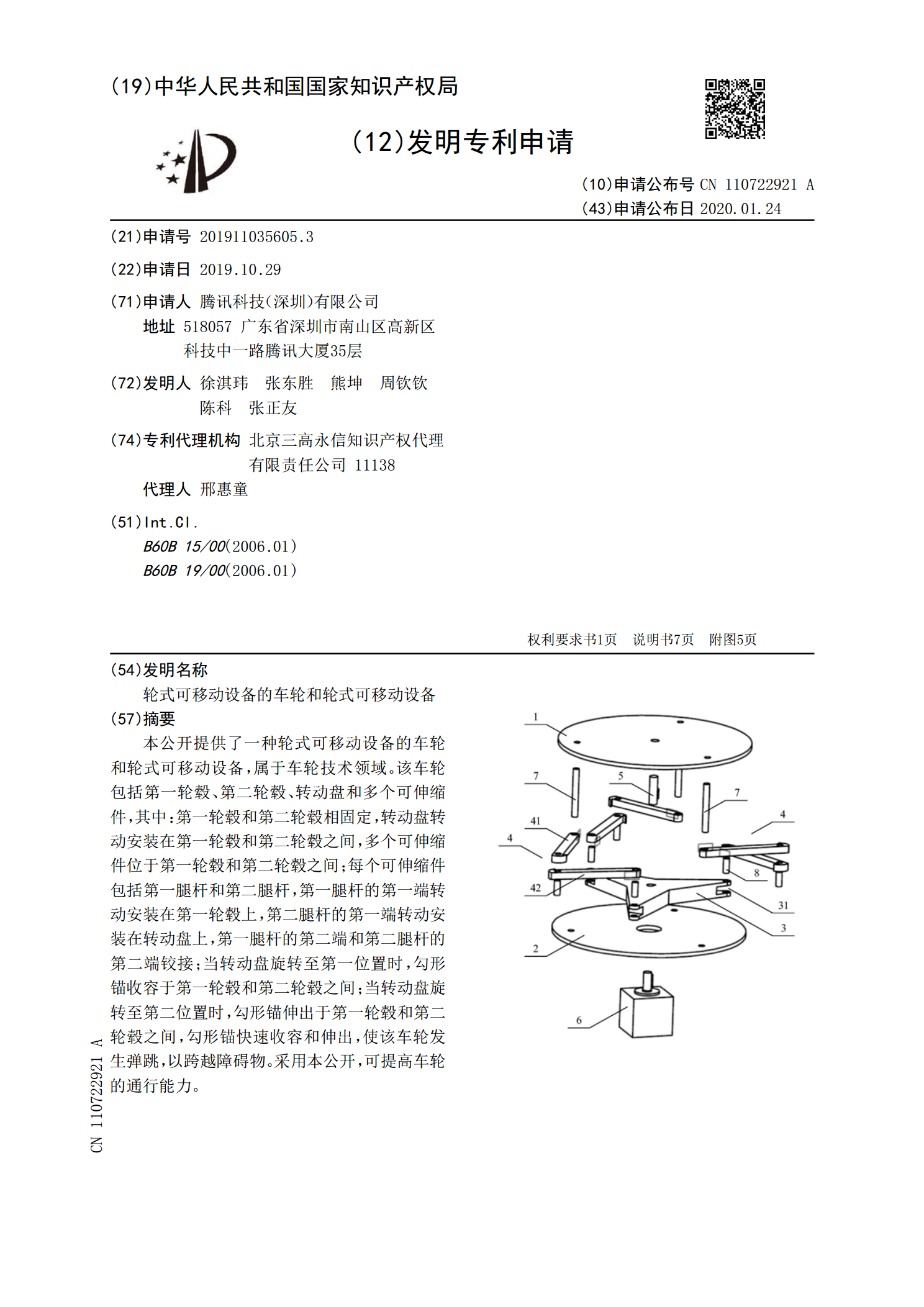
本公开提供了一种轮式可移动设备的车轮和轮式可移动设备,属于车轮技术领域。该车轮包括第一轮毂、第二轮毂、转动盘和多个可伸缩件,其中:第一轮毂和第二轮毂相固定,转动盘转动安装在第一轮毂和第二轮毂之间,多个可伸缩件位于第一轮毂和第二轮毂之间;每个可伸缩件包括第一腿杆和第二腿杆,第一腿杆的第一端转动安装在第一轮毂上,第二腿杆的第一端转动安装在转动盘上,第一腿杆的第二端和第二腿杆的第二端铰接;当转动盘旋转至第一位置时,勾形锚收容于第一轮毂和第二轮毂之间;当转动盘旋转至第二位置时,勾形锚伸出于第一轮毂和第二轮毂之间,
机械腿和轮式移动设备.pdf
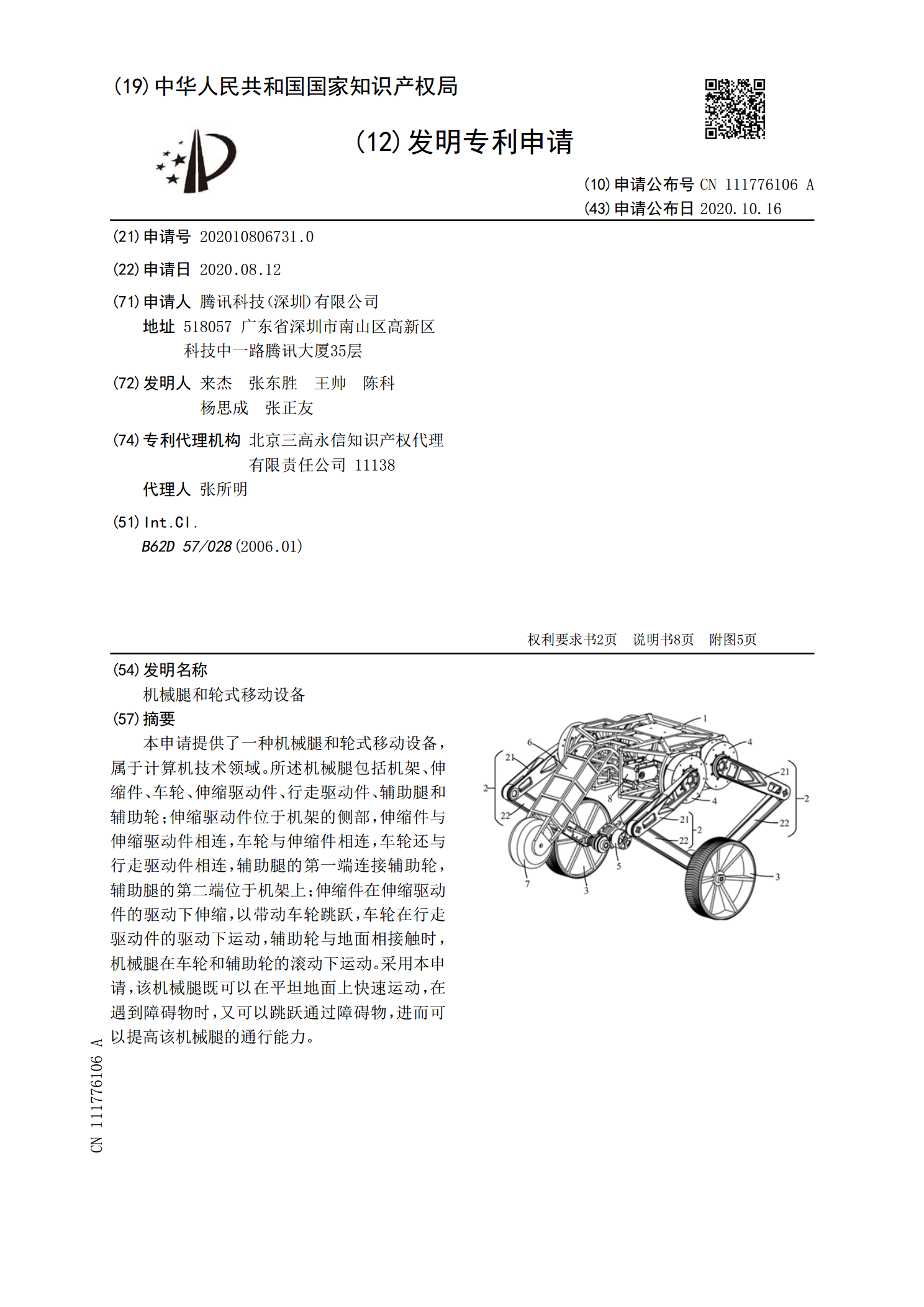
本申请提供了一种机械腿和轮式移动设备,属于计算机技术领域。所述机械腿包括机架、伸缩件、车轮、伸缩驱动件、行走驱动件、辅助腿和辅助轮;伸缩驱动件位于机架的侧部,伸缩件与伸缩驱动件相连,车轮与伸缩件相连,车轮还与行走驱动件相连,辅助腿的第一端连接辅助轮,辅助腿的第二端位于机架上;伸缩件在伸缩驱动件的驱动下伸缩,以带动车轮跳跃,车轮在行走驱动件的驱动下运动,辅助轮与地面相接触时,机械腿在车轮和辅助轮的滚动下运动。采用本申请,该机械腿既可以在平坦地面上快速运动,在遇到障碍物时,又可以跳跃通过障碍物,进而可以提高该

全向轮式可移动重载铸造机器人.pdf
本发明公开了一种全向轮式可移动重载铸造机器人,包括四驱轮式移动平台、回转装置、升降装置、并联工作臂、配重装置、末端执行器和双目视觉系统。本发明的四驱轮式移动平台采用四轮全向移动加四角驻点自平衡支撑的方式,实现长距离灵活稳定行走和驻点自平衡支撑,提高作业的支撑稳定性,机器人本体还具有空间三个移动和两个转动共五个运动自由度;回转装置、升降装置可分别实现回转和升降调节,四自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸

一种可越障的悬挂轮式移动平台.pdf
本发明公开了一种可越障的悬挂轮式移动平台,包括安装在车身主体上端面的监测感知周围环境的激光雷达、安装在车身主体内部用于控制整车的工控机;还包括安装在车身主体下方的车轮,且车轮连接在轮座上,所述轮座通过减震装置连接短支撑杆,该移动平台能够主动调整车身离地高度和倾斜角度,提高狭小空间和倾斜路面的通过能力,满足不同功能需求。

可展轮式移动机器人.pdf
一种可展轮式移动机器人,包括车架、能相对车架摆动的摆动悬架组件、分别可转动地连接于摆动悬架组件两端的四个驱动轴组件、分别固定连接于四个驱动轴组件,使车轮组相对于车架可转动的四个车轮组。每个车轮组包括圆柱形的正常车轮、三个可展轮缘、三个二叉杆及驱动件。每个可展轮缘为弓形,且具有两个轴承孔。三个二叉杆围绕正常车轮的轴心设置,每个二叉杆具有两个自由端及一个弯折部,弯折部可转动地连接于正常车轮的外侧,每个二叉杆的两个自由端分别与其中一个可展轮缘中间轴承孔及相邻可展轮缘的边缘轴承孔可转动地连接。驱动件驱动三个二叉杆