
一种适用于自动驾驶车导航的环境建模方法.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种适用于自动驾驶车导航的环境建模方法.pdf
本发明为一种适用于自动驾驶车导航的环境建模方法。自动驾驶车的导航需解决的关键问题之一是建模车辆行驶的环境,辨识其中的景物;将环境信息转化为自动驾驶车智能避障、路径规划可用的参数化信息。本发明采取在自动驾驶车的前端装配激光传感器;测量激光传感器中心与车辆中心的空间距离等一系列步骤;利用车辆行驶过程中采集的激光点序列建模整个环境。通过配准激光传感器在相邻采样时刻的观测求取车辆的位移和航向角,是一种自包含的方案,可有效避免同类方法中所使用的基于星座系统的方案在极端环境中信号丢失的问题;基于概率图模型推理的方法处

车联网环境下自动驾驶交通流建模与分析.docx
车联网环境下自动驾驶交通流建模与分析车联网环境下自动驾驶交通流建模与分析引言:自动驾驶技术是近年来快速发展和广泛应用的领域之一。它将汽车与互联网技术相结合,实现了车辆之间的智能通信和协作。在自动驾驶的背景下,交通流状况的建模和分析变得更加重要。本文将探讨在车联网环境下,自动驾驶交通流的建模方法和分析技术。一、自动驾驶交通流的建模方法1.基于驾驶行为的建模方法自动驾驶车辆在交通流中的行为受到驾驶员的行为和决策的影响。因此,基于驾驶行为的建模方法是一种有效的模拟自动驾驶交通流的方法。这种方法将驾驶员的行为特征

导航车及导航方法.pdf
本发明公开了一种导航车及导航方法,目的在于解决现有的自动导航车,普遍采用双轮差速或麦克纳姆轮驱动,采用磁条或激光配合折弯的钣金件进行导航定位,定位精度差的问题。其包括车架单元、驱动单元、电力单元、控制系统,所述驱动单元、电力单元分别与车架单元相连。本发明中,采用上端车架与辅助支撑架的结构设计,其有利于降低车体的制造难度和生产成本。基于分体式设计,使得导航车的制造更加简单。而上端车架则能作为上端支撑部分,提供更好的承载能力。同时,基于驱动单元的设计,使本发明的导航车具有全向移动的能力,且具有较好的越障过坑能
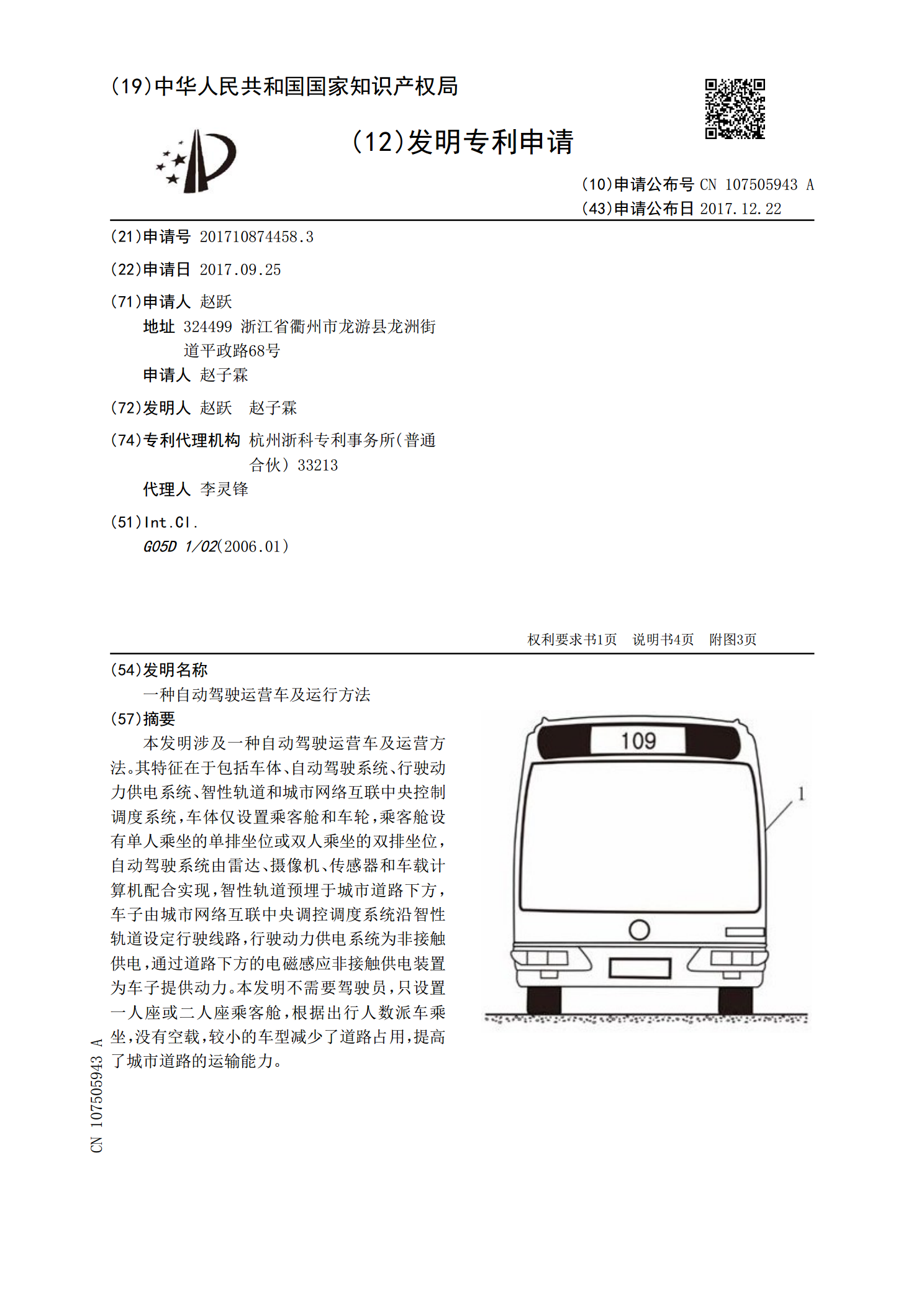
一种自动驾驶运营车及运行方法.pdf
本发明涉及一种自动驾驶运营车及运营方法。其特征在于包括车体、自动驾驶系统、行驶动力供电系统、智性轨道和城市网络互联中央控制调度系统,车体仅设置乘客舱和车轮,乘客舱设有单人乘坐的单排坐位或双人乘坐的双排坐位,自动驾驶系统由雷达、摄像机、传感器和车载计算机配合实现,智性轨道预埋于城市道路下方,车子由城市网络互联中央调控调度系统沿智性轨道设定行驶线路,行驶动力供电系统为非接触供电,通过道路下方的电磁感应非接触供电装置为车子提供动力。本发明不需要驾驶员,只设置一人座或二人座乘客舱,根据出行人数派车乘坐,没有空载,

导航装置、自动驾驶控制装置以及导航方法.pdf
一种导航装置,其具备:路线设定单元,其能够基于包含行驶路径的信息的第一地图和本车辆的位置信息来设定将本车辆引导至目的地的引导路线;以及匹配单元,其基于本车辆的位置信息,来将本车辆的位置设为第一自身位置匹配到第一地图中的本车辆正在行驶的行驶路径上,该导航装置还具备:行驶车道检测单元,其基于包含行驶路径内的行驶车道的信息的第二地图和本车辆的位置信息,来将本车辆的位置设为第二自身位置匹配到第二地图中的本车辆正在行驶的行驶车道上;以及判定单元,其判定第一自身位置中是否包含第二自身位置,其中,在设定了引导路线的情况