
一种气动机械手爪.pdf

又珊****ck


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种气动机械手爪.pdf
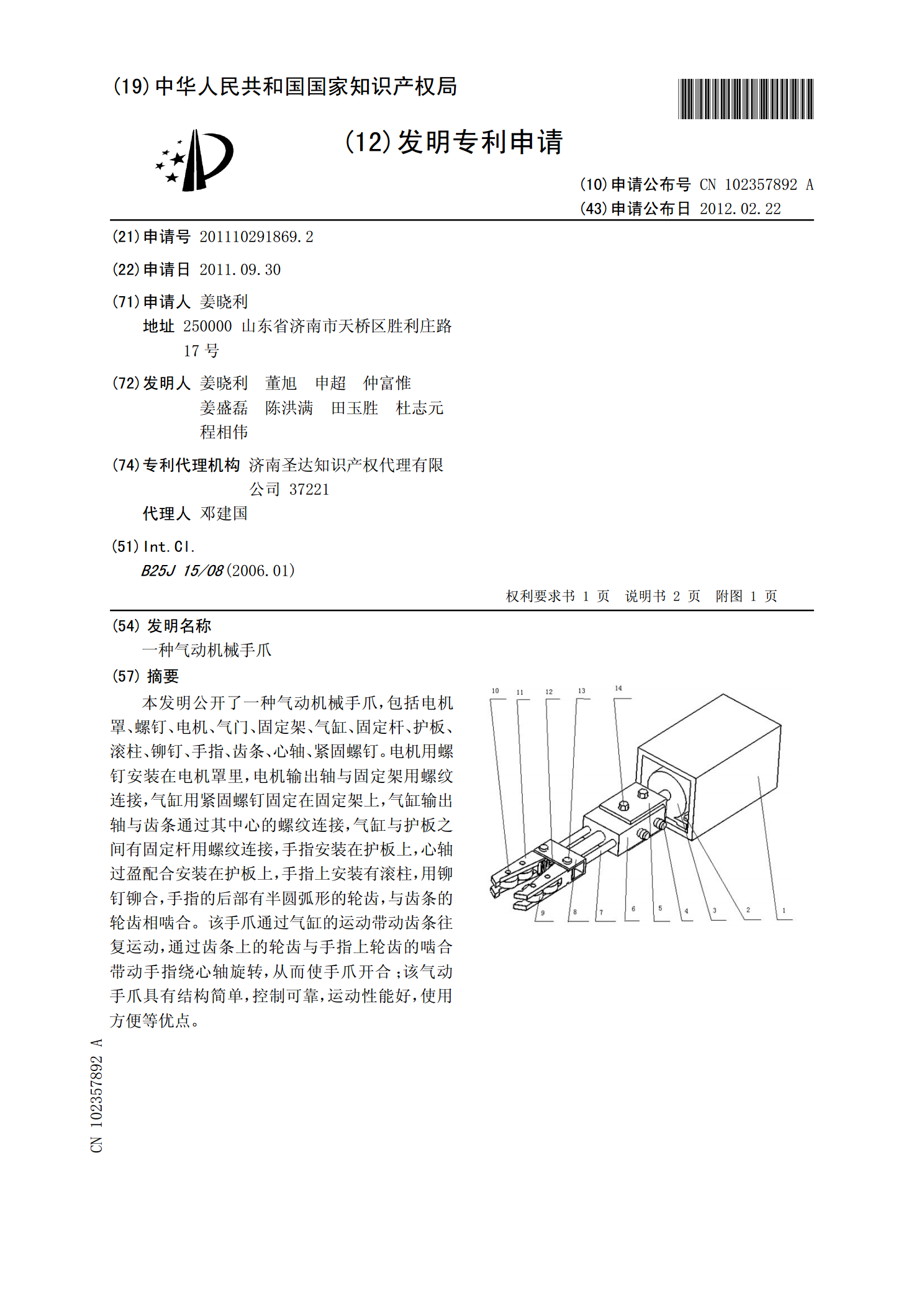
本发明公开了一种气动机械手爪,包括电机罩、螺钉、电机、气门、固定架、气缸、固定杆、护板、滚柱、铆钉、手指、齿条、心轴、紧固螺钉。电机用螺钉安装在电机罩里,电机输出轴与固定架用螺纹连接,气缸用紧固螺钉固定在固定架上,气缸输出轴与齿条通过其中心的螺纹连接,气缸与护板之间有固定杆用螺纹连接,手指安装在护板上,心轴过盈配合安装在护板上,手指上安装有滚柱,用铆钉铆合,手指的后部有半圆弧形的轮齿,与齿条的轮齿相啮合。该手爪通过气缸的运动带动齿条往复运动,通过齿条上的轮齿与手指上轮齿的啮合带动手指绕心轴旋转,从而使手爪
一种气动夹持机械手爪.pdf
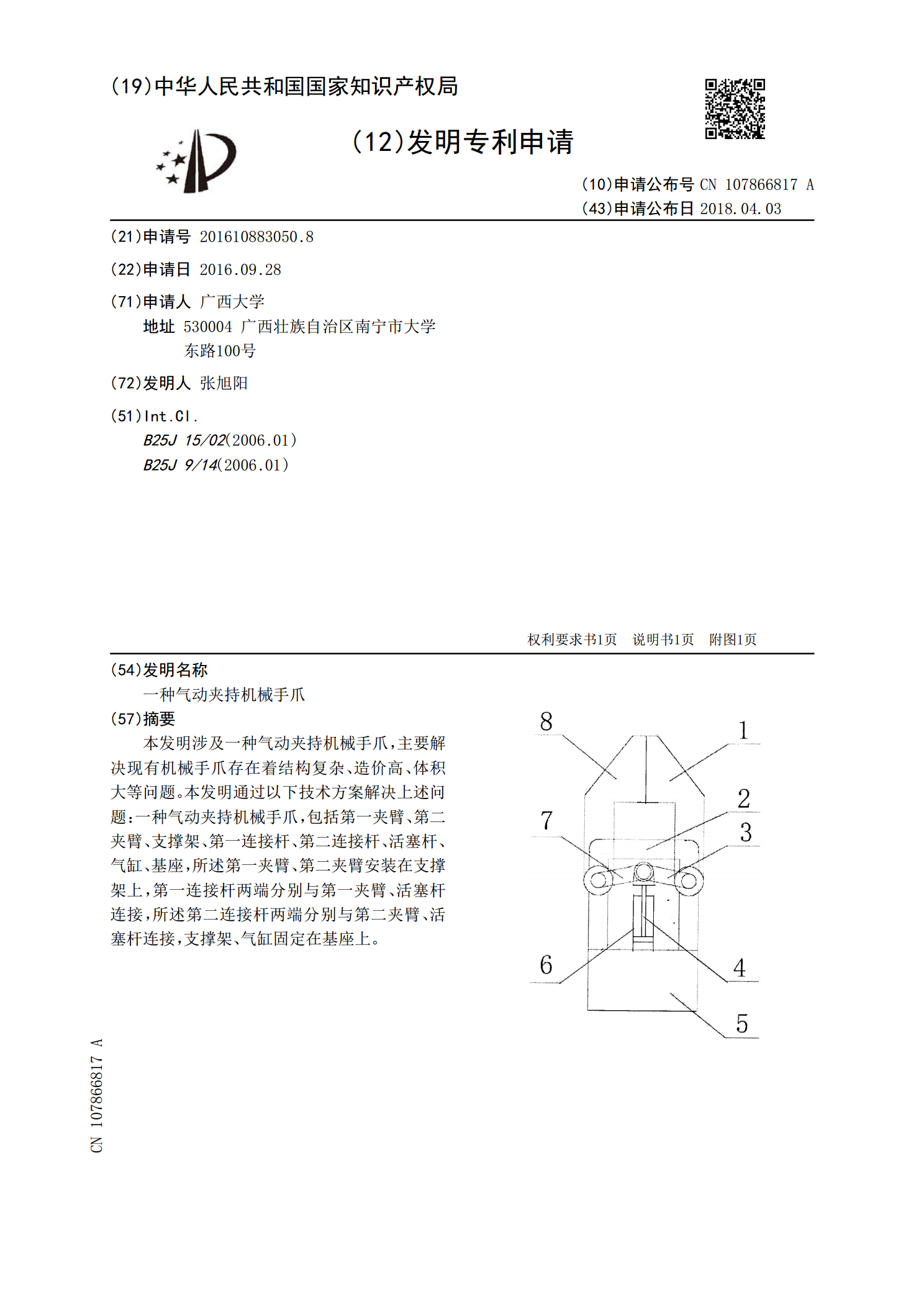
本发明涉及一种气动夹持机械手爪,主要解决现有机械手爪存在着结构复杂、造价高、体积大等问题。本发明通过以下技术方案解决上述问题:一种气动夹持机械手爪,包括第一夹臂、第二夹臂、支撑架、第一连接杆、第二连接杆、活塞杆、气缸、基座,所述第一夹臂、第二夹臂安装在支撑架上,第一连接杆两端分别与第一夹臂、活塞杆连接,所述第二连接杆两端分别与第二夹臂、活塞杆连接,支撑架、气缸固定在基座上。
一种新型气动机械手爪.pdf
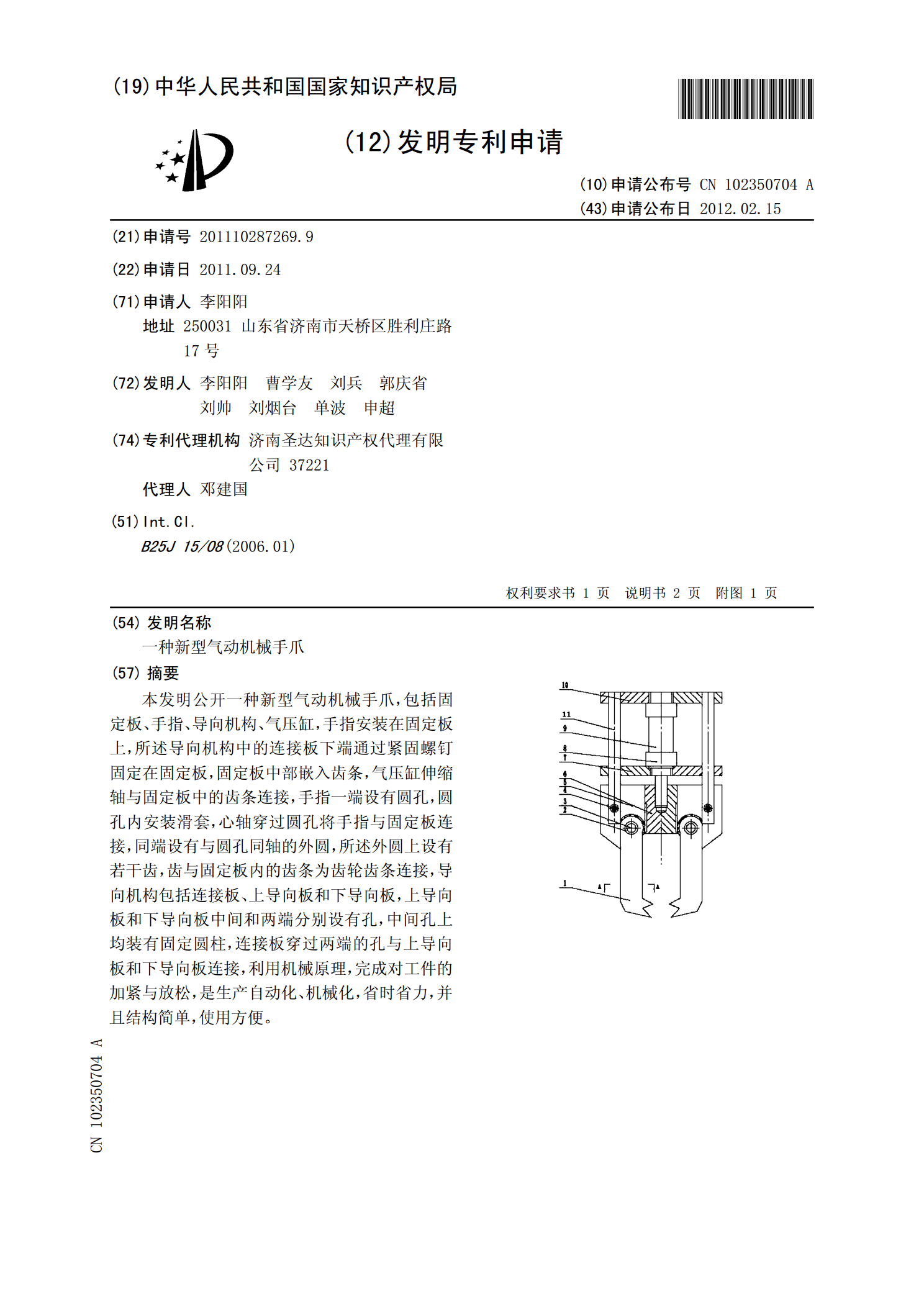
本发明公开一种新型气动机械手爪,包括固定板、手指、导向机构、气压缸,手指安装在固定板上,所述导向机构中的连接板下端通过紧固螺钉固定在固定板,固定板中部嵌入齿条,气压缸伸缩轴与固定板中的齿条连接,手指一端设有圆孔,圆孔内安装滑套,心轴穿过圆孔将手指与固定板连接,同端设有与圆孔同轴的外圆,所述外圆上设有若干齿,齿与固定板内的齿条为齿轮齿条连接,导向机构包括连接板、上导向板和下导向板,上导向板和下导向板中间和两端分别设有孔,中间孔上均装有固定圆柱,连接板穿过两端的孔与上导向板和下导向板连接,利用机械原理,完成对

轴类两工位气动抓取手爪.pdf
本发明涉及一种轴类两工位气动抓取手爪。其特别之处:包括壳体(6)和旋转轴(2),该旋转轴(2)的一端固定在壳体(6)上,在该旋转轴(2)上还固定安装有旋转齿轮,该旋转齿轮与一单面齿条(11)啮合,而该单面齿条(11)还与一旋转气缸(10)的活塞固定连接;在前述壳体(6)上还分别安装有两个松紧气缸(1),每个松紧气缸(1)的活塞分别与一双面齿条(3)固定连接,在该双面齿条(3)两侧分别安装有两个驱动齿轮(4)。本发明的手爪是一种用于数控车床在加工长轴类零件时,在桁架式机械手加工单元中的可以在机床内实现卸料、

一种气动的鸡蛋防碎抓取手爪及其抓取方法.pdf
一种气动的鸡蛋防碎抓取手爪及其抓取方法,采用圆柱形中空的抓取手爪,空腔的入口边缘处设有缓冲垫圈,抓取手爪的尾端外接真空负压源,抓取手爪通过真空连接管路连接蛋液收集盒,蛋液收集盒能够在负压作用下将破碎的鸡蛋吸入并使蛋液与空气分离,蛋液滞留在蛋液收集盒当中,空气进入真空负压源;所述的抓取手爪安装在支架板上,支架板与蛋液收集盒的一侧固定,蛋液收集盒的另一侧连接机械臂;所述的支架板上安装光电传感器,通过光电传感器检测鸡蛋位置。本发明针对鸡蛋自动化雕刻时存在的装夹过程中易碎、无定位面、刚性定位比较困难等问题,实现了