
一种电动汽车多电机驱动控制系统及其工作方法.pdf

一吃****仕龙


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动汽车多电机驱动控制系统及其工作方法.pdf
一种电动汽车多电机驱动控制系统及其工作方法,解决电动汽车中的行走轮的转向差速问题,通过设置调节盘和左、右加减速信号采集器,以及通过转向传动机构形成同步反相触发结构,当需要转向时,调节盘可以根据汽车的转向触发两个采集器同步控制两个汽车后轮轴上的电机,实现一个电机加速、一个电机减速,以可靠、平稳地实现转弯,结构简单,对电动汽车多电机驱动的控制技术领域有巨大的推动作用。

一种电动汽车多电机驱动控制系统及其工作方法.pdf
本发明公开了一种电动汽车多电机驱动控制系统及其工作方法,包括:左加减速信号采集器与右加减速信号采集器固定在滑块上,可沿固定在控制箱上的滑道滑行。左加减速拉线和右加减速拉线与固定在控制箱上的可按轴心旋转摆动的调节盘不滑动定位连接,并预留驻车方向死角松度间隙。控制箱固定在车体上。左信号输出线连接车辆左侧各电机控制器,右信号输出线连接车辆右侧各电机控制器。车辆加减速拉线连接拉动滑块沿滑道运动,给整车加速。归位簧一端固定在控制箱上,另一端连接滑块上,回拉滑块为整车减速。调节盘是由车辆转向机构的旋转柱连接减速齿连接
轮毂电机电动汽车的多连杆驱动系统及其工作方法.pdf
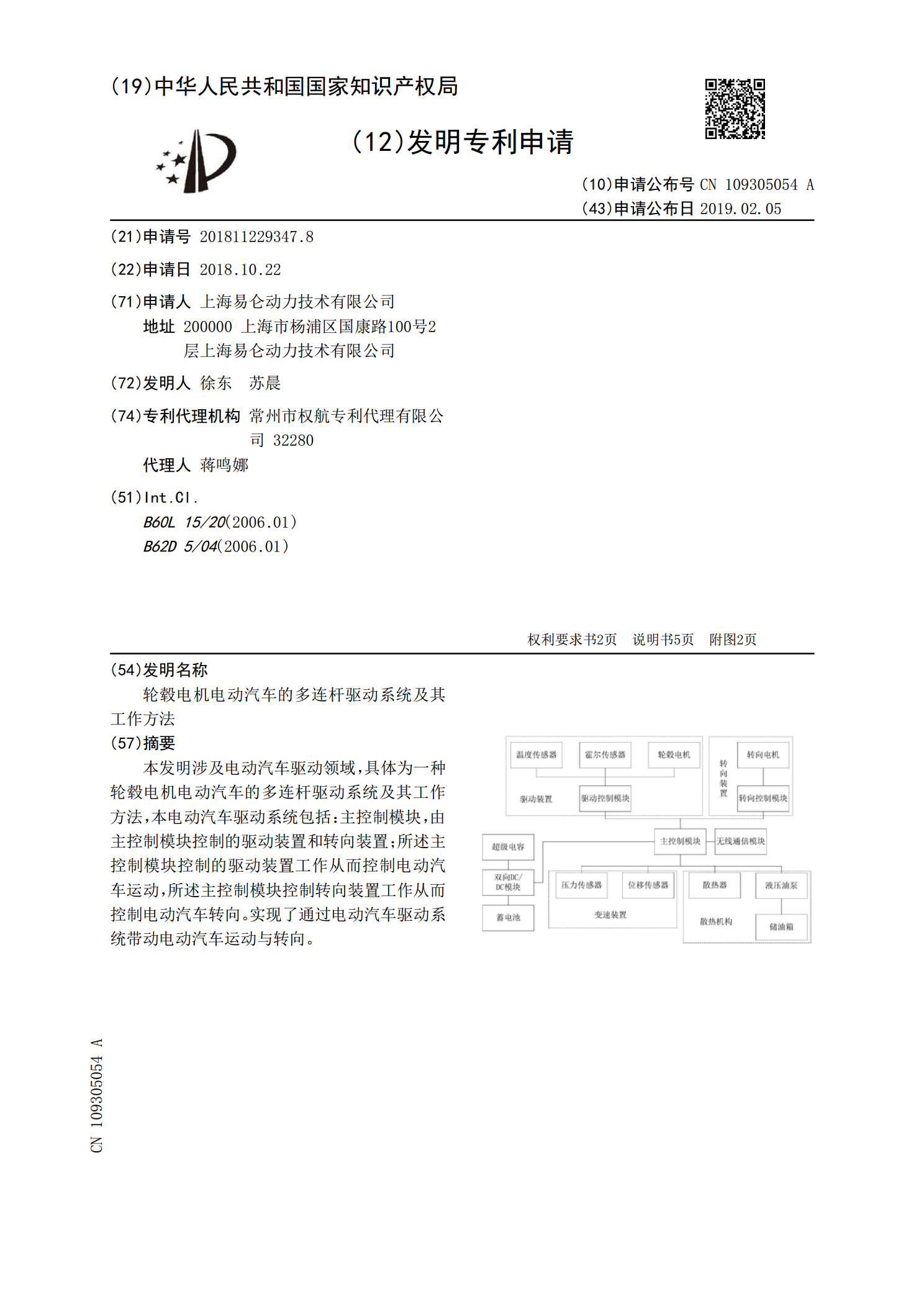
本发明涉及电动汽车驱动领域,具体为一种轮毂电机电动汽车的多连杆驱动系统及其工作方法,本电动汽车驱动系统包括:主控制模块,由主控制模块控制的驱动装置和转向装置;所述主控制模块控制的驱动装置工作从而控制电动汽车运动,所述主控制模块控制转向装置工作从而控制电动汽车转向。实现了通过电动汽车驱动系统带动电动汽车运动与转向。
多电机驱动的电动汽车及电动汽车进行多电机驱动的方法.pdf
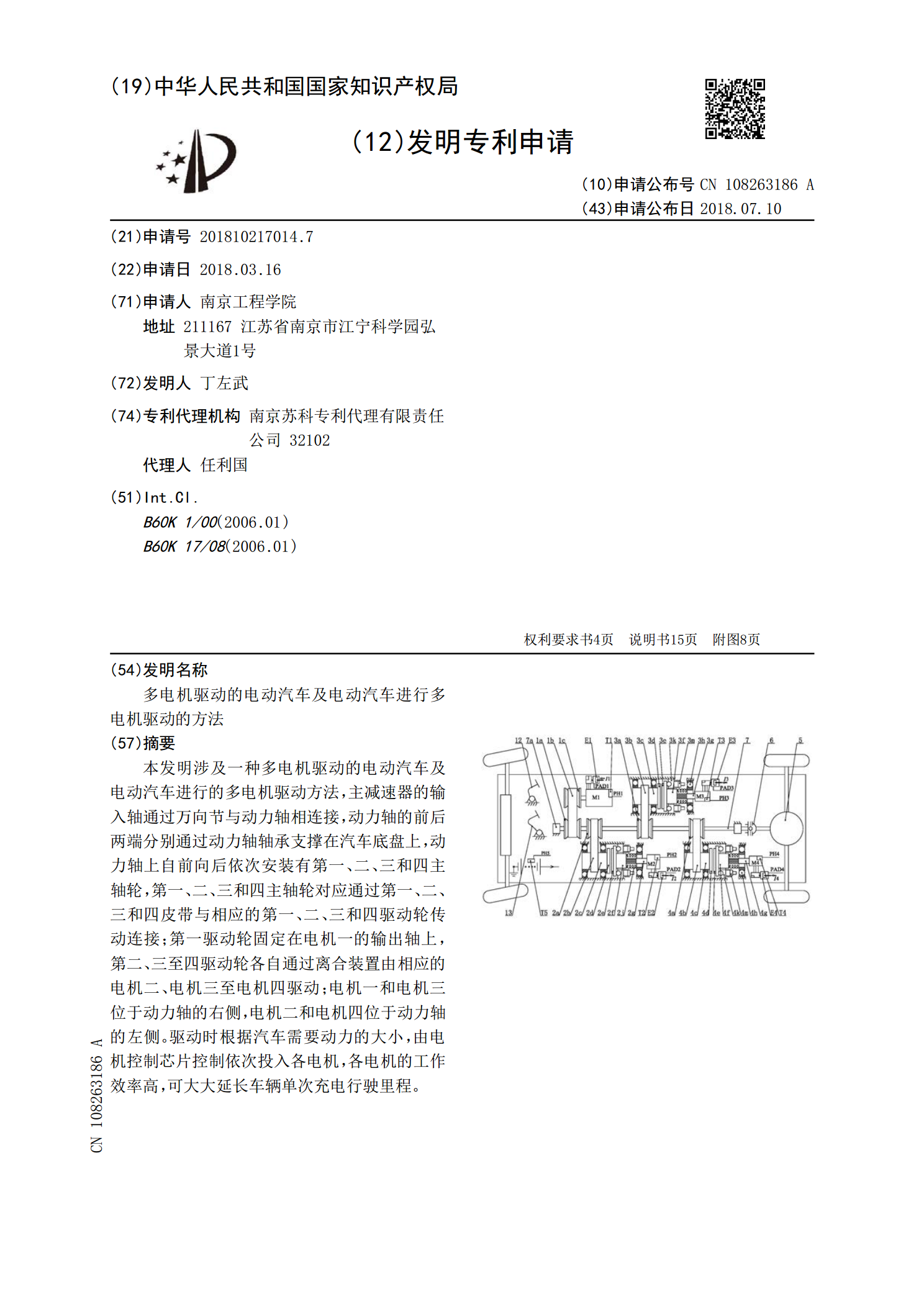
本发明涉及一种多电机驱动的电动汽车及电动汽车进行的多电机驱动方法,主减速器的输入轴通过万向节与动力轴相连接,动力轴的前后两端分别通过动力轴轴承支撑在汽车底盘上,动力轴上自前向后依次安装有第一、二、三和四主轴轮,第一、二、三和四主轴轮对应通过第一、二、三和四皮带与相应的第一、二、三和四驱动轮传动连接;第一驱动轮固定在电机一的输出轴上,第二、三至四驱动轮各自通过离合装置由相应的电机二、电机三至电机四驱动;电机一和电机三位于动力轴的右侧,电机二和电机四位于动力轴的左侧。驱动时根据汽车需要动力的大小,由电机控制芯

电动汽车多电机驱动系统及其控制方法.pdf
本发明涉及一种电动汽车多电机驱动系统及其控制方法。多电机驱动系统包括控制单元、通信单元、驱动单元和电机及采集电机运行状态的信号传感器,控制单元只有一个,驱动单元至少有两个,控制单元经通信单元和驱动单元相连,驱动单元和电机一一对应相连,信号传感器的输出端和控制单元相连。控制方法为:控制单元接收电动汽车驾驶员操作指令,再发出控制信号通过通信单元传输给驱动单元,驱动单元驱动电机运行,信号传感器实时采集电机运转状态并回传信息给控制单元,实现电机的实时监控。本发明实现一个控制单元对多个电机的控制,方便实现电动汽车中