
履带与车轮复合式移动机器人.pdf

元容****少女


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
履带与车轮复合式移动机器人.pdf
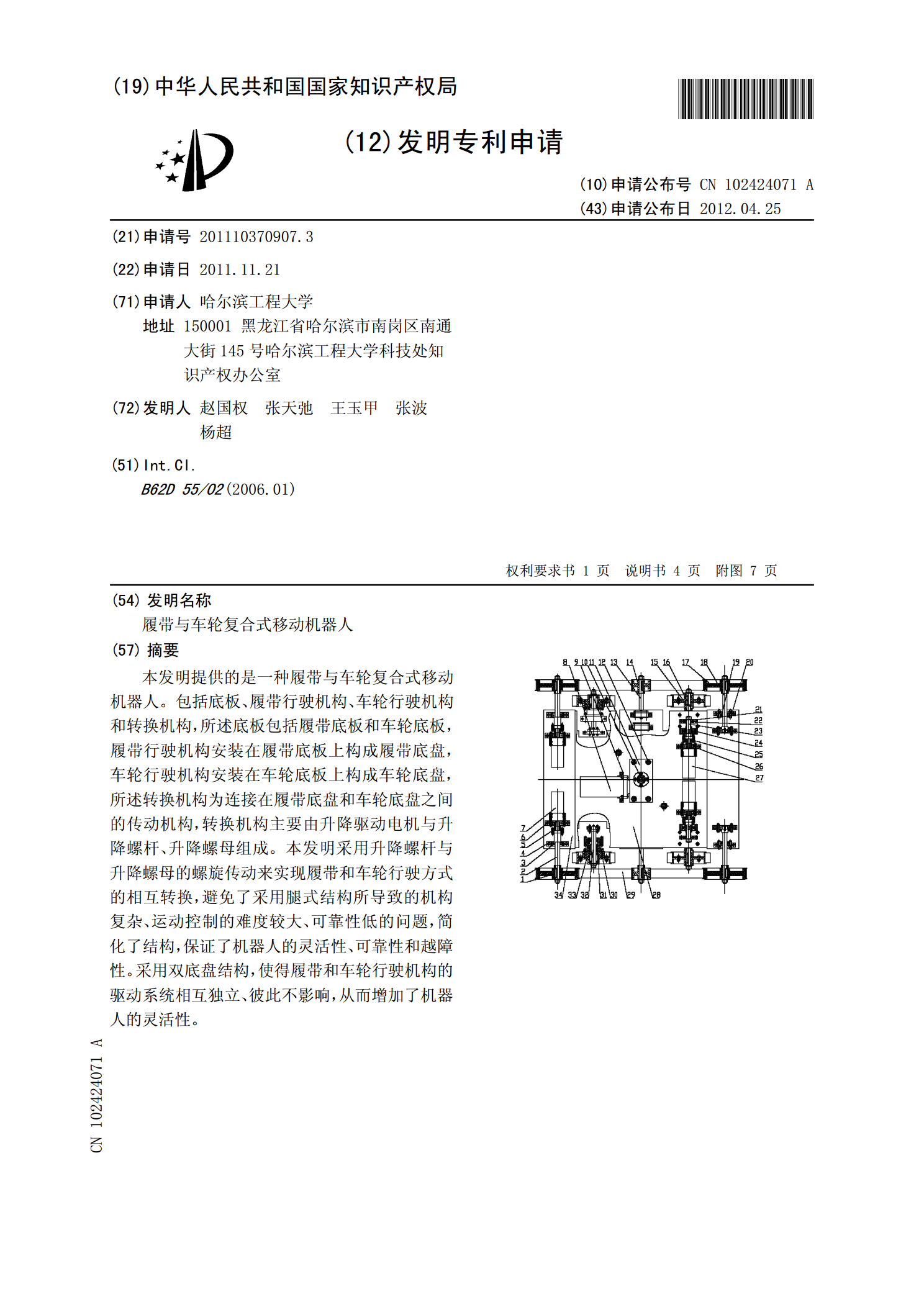
本发明提供的是一种履带与车轮复合式移动机器人。包括底板、履带行驶机构、车轮行驶机构和转换机构,所述底板包括履带底板和车轮底板,履带行驶机构安装在履带底板上构成履带底盘,车轮行驶机构安装在车轮底板上构成车轮底盘,所述转换机构为连接在履带底盘和车轮底盘之间的传动机构,转换机构主要由升降驱动电机与升降螺杆、升降螺母组成。本发明采用升降螺杆与升降螺母的螺旋传动来实现履带和车轮行驶方式的相互转换,避免了采用腿式结构所导致的机构复杂、运动控制的难度较大、可靠性低的问题,简化了结构,保证了机器人的灵活性、可靠性和越障性
旋臂履带组合式爬楼车轮.pdf
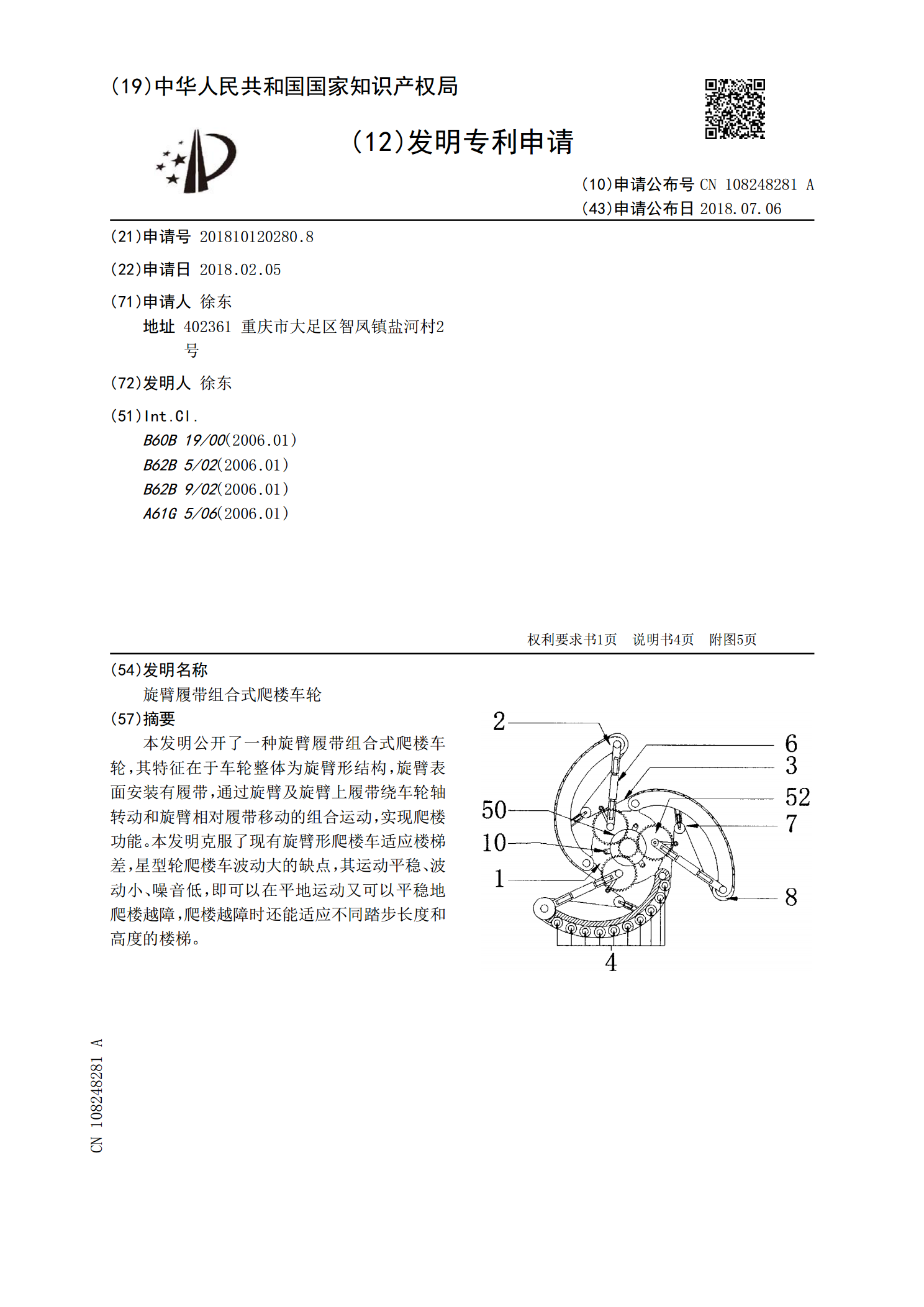
本发明公开了一种旋臂履带组合式爬楼车轮,其特征在于车轮整体为旋臂形结构,旋臂表面安装有履带,通过旋臂及旋臂上履带绕车轮轴转动和旋臂相对履带移动的组合运动,实现爬楼功能。本发明克服了现有旋臂形爬楼车适应楼梯差,星型轮爬楼车波动大的缺点,其运动平稳、波动小、噪音低,即可以在平地运动又可以平稳地爬楼越障,爬楼越障时还能适应不同踏步长度和高度的楼梯。

履带‑腿足复合式移动机器人.pdf
一种履带‑腿足复合式移动机器人,包括履带行走单元,在履带行走单元的前部两侧以及后部两侧均安装有大腿辅助越障单元,每条大腿辅助越障单元上连接一个小腿辅助越障单元。常规履带行进模式下,大腿可辅助越障,小腿可以收缩不用;大腿伸展辅助越过较低的障碍物;小腿参与的模式下可以变为四足运动的模式。两侧大小腿都有独立的动力系统驱动,可以在控制系统的控制下,独立摆动,帮助越过障碍或者像四足一样行进。该机器人在常规履带式机器人的基础上增加了大腿和小腿,既可以用传统履带的模式行进,也可以在越障时采用四足的模式辅助越障,既保留了
复合履带车轮变形机构.pdf
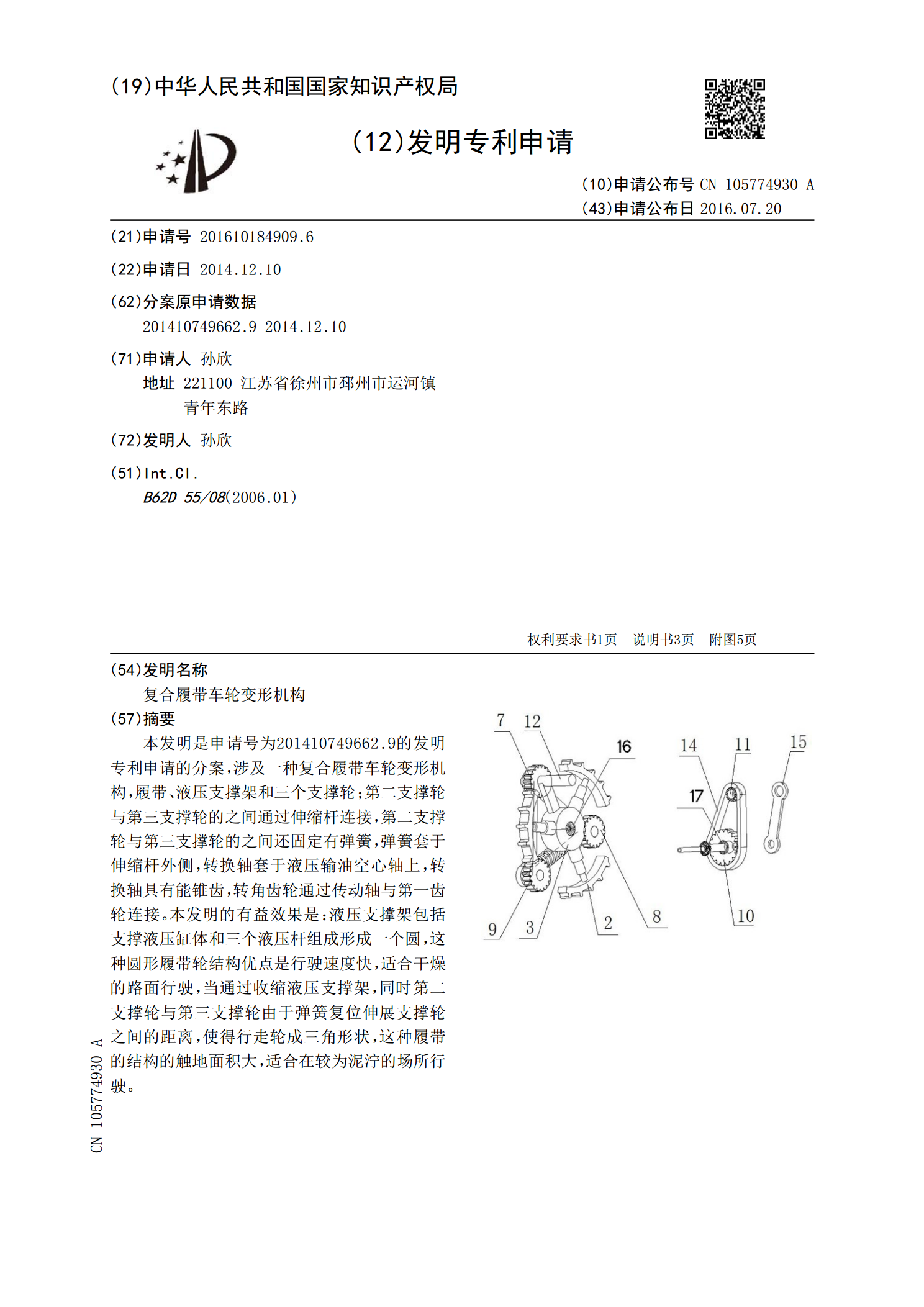
本发明是申请号为201410749662.9的发明专利申请的分案,涉及一种复合履带车轮变形机构,履带、液压支撑架和三个支撑轮;第二支撑轮与第三支撑轮的之间通过伸缩杆连接,第二支撑轮与第三支撑轮的之间还固定有弹簧,弹簧套于伸缩杆外侧,转换轴套于液压输油空心轴上,转换轴具有能锥齿,转角齿轮通过传动轴与第一齿轮连接。本发明的有益效果是:液压支撑架包括支撑液压缸体和三个液压杆组成形成一个圆,这种圆形履带轮结构优点是行驶速度快,适合干燥的路面行驶,当通过收缩液压支撑架,同时第二支撑轮与第三支撑轮由于弹簧复位伸展支撑

冲压式复合履带车轮.pdf
本发明公开了一种冲压式复合履带车轮,旨在提供一种结构简单,加工方便、重量轻、可靠性好的冲压式复合履带车轮。它包括有盘形的轮辐,轮辐的中心制有供与驱动轴连接的定位孔和连接孔,其特征是在轮辐两端面的四周分别均布固定有多个与轮辐端面垂直的V形连接架,连接架V形的底部露出轮辐的外缘组成定位齿轮,并且该定位齿轮是以定位孔为中心的外接圆,在定位齿轮上包裹有环形的柔性履带,履带的内表面制有与定位齿轮上轮齿相配的凹槽,由凹槽将履带与定位齿轮连接。该发明轮辐和连接架均可通过冷冲压成型获得,生产效率比传统驱动轮或履带高许多,