
电动车辆及其控制方法.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电动车辆及其控制方法.pdf
电动车辆(100)具有:电动发电机(MG),构成为能够在该电动发电机和与驱动轮(80)联结的驱动轴(60)之间相互传递转矩;包括蓄电装置(B)的直流电源(10#);和变换器(14),用于在直流电源和电动发电机之间进行双向的直流/交流电力变换。MG-ECU(35)按照电动发电机的转矩指令值(Trqcom)和状态值来控制多个电力用半导体开关元件(Q3-Q8)的接通断开。MG-ECU(35)在加速踏板(51)释放时,根据蓄电装置(B)的充电状态来控制变换器(14),以在电动发电机(MG)的各相交流电流上叠加直流

电动车辆及其控制方法.pdf
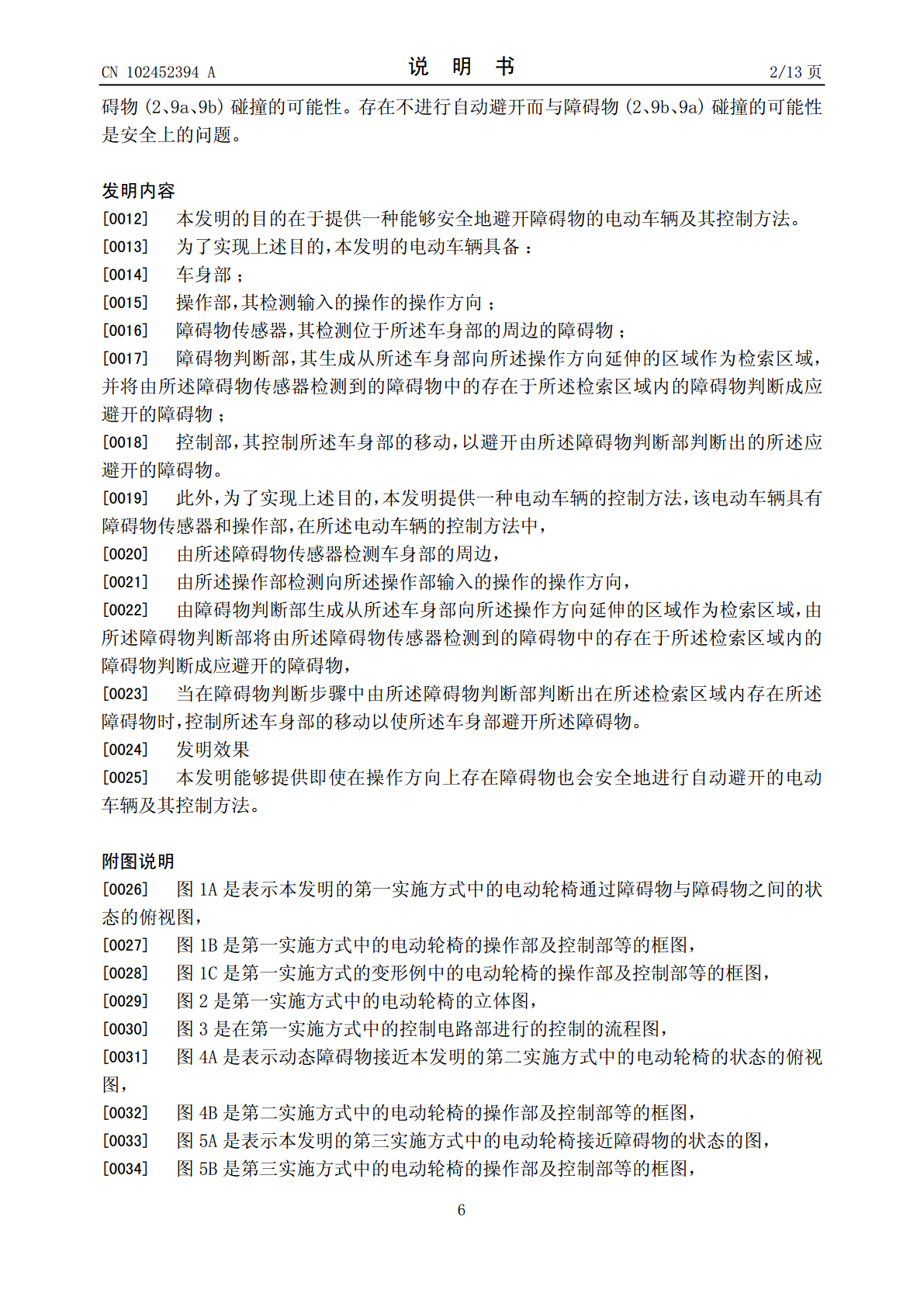
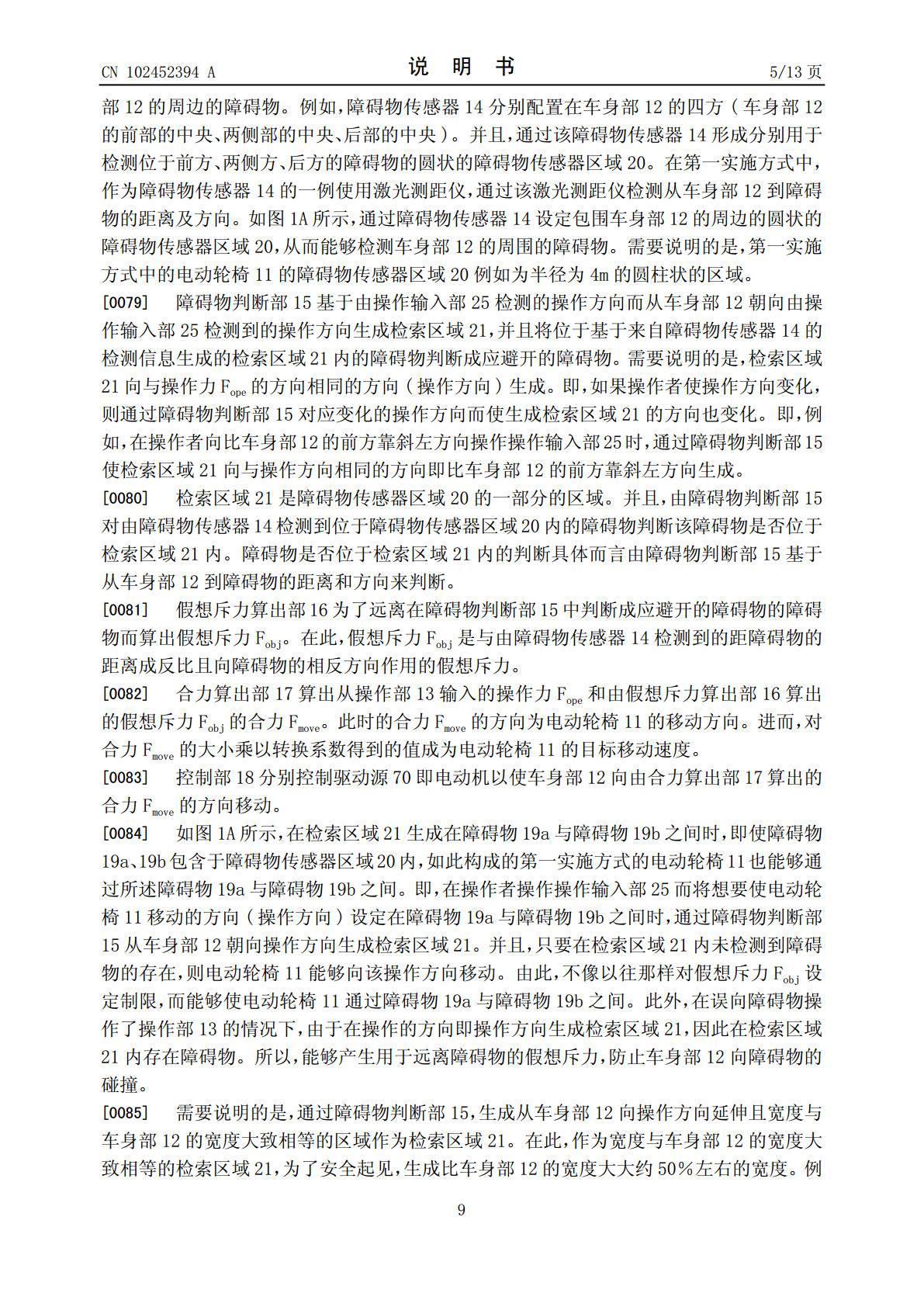
本发明的目的在于提供一种能够安全地避开障碍物的电动车辆。电动轮椅(11)构成为具备:车身部(12);检测操作者的操作的操作部(13);检测存在于车身部(12)的周边的障碍物的障碍物传感器(14);将从车身部(12)向操作方向生成的区域作为检索区域(21),将存在于检索区域(21)内的障碍物判断成应避开的障碍物的障碍物判断部(15);算出用于远离由障碍物判断部判断出的障碍物的假想斥力的假想斥力算出部(16);算出操作力及假想斥力的合力的合力算出部(17);进行控制以使车身部向合力的方向移动的控制部(18)。

电动车辆及其控制方法.pdf
电动车辆具备:电动机,其用于产生与驾驶员的加速器操作量相应的车辆驱动力;和报知部,其用于在车轮抵接于行进阻碍物时,以与该车轮没有抵接于行进阻碍物时相比驾驶员更容易感知加速器操作量的方式,报知与驾驶员的加速器操作相关的信息。

电动车辆及其控制方法.pdf
本发明提供电动车辆及其控制方法。混合动力车辆(20)具备用于产生车辆驱动力的多个电动发电机(MG1、MG2)以及发动机(22)。马达ECU(45)对电动发电机(MG1、MG2)根据各自的扭矩指令值加以控制。马达ECU(45)基于电动发电机(MG1、MG2)的运转状态选择执行减振控制的电动发电机。对执行减振控制的电动发电机的输出扭矩进行控制,以使得与用于消除驱动轮(39a、39b)的转速的周期性的变动成分的周期性的减振扭矩成分对应的补偿扭矩和用于产生车辆驱动力的扭矩重叠。
电动车辆、电动车辆的主动安全控制系统及其控制方法.pdf
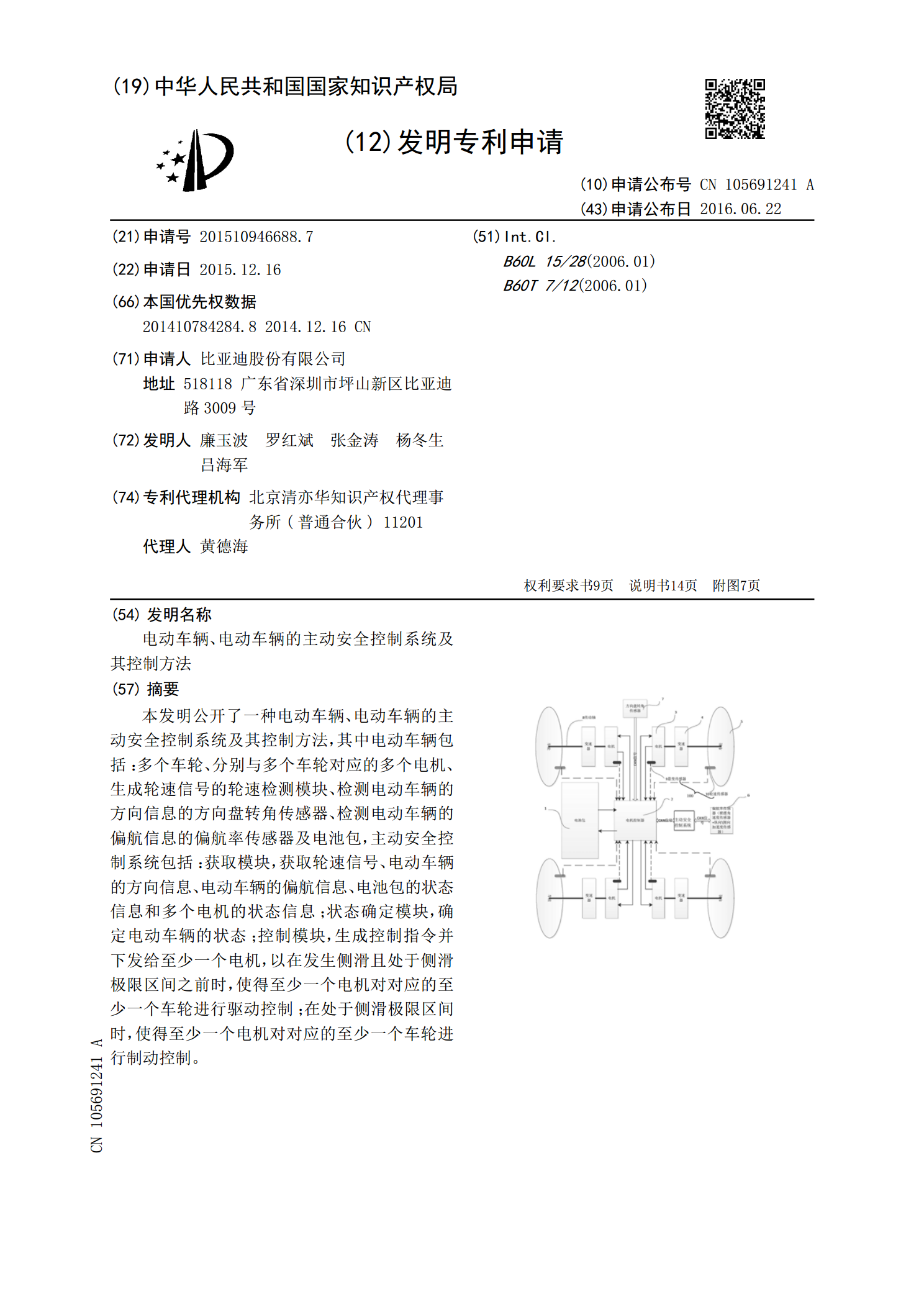
本发明公开了一种电动车辆、电动车辆的主动安全控制系统及其控制方法,其中电动车辆包括:多个车轮、分别与多个车轮对应的多个电机、生成轮速信号的轮速检测模块、检测电动车辆的方向信息的方向盘转角传感器、检测电动车辆的偏航信息的偏航率传感器及电池包,主动安全控制系统包括:获取模块,获取轮速信号、电动车辆的方向信息、电动车辆的偏航信息、电池包的状态信息和多个电机的状态信息;状态确定模块,确定电动车辆的状态;控制模块,生成控制指令并下发给至少一个电机,以在发生侧滑且处于侧滑极限区间之前时,使得至少一个电机对对应的至少一