
电动车辆、电动车辆的主动安全控制系统及其控制方法.pdf

是你****盟主


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动车辆、电动车辆的主动安全控制系统及其控制方法.pdf
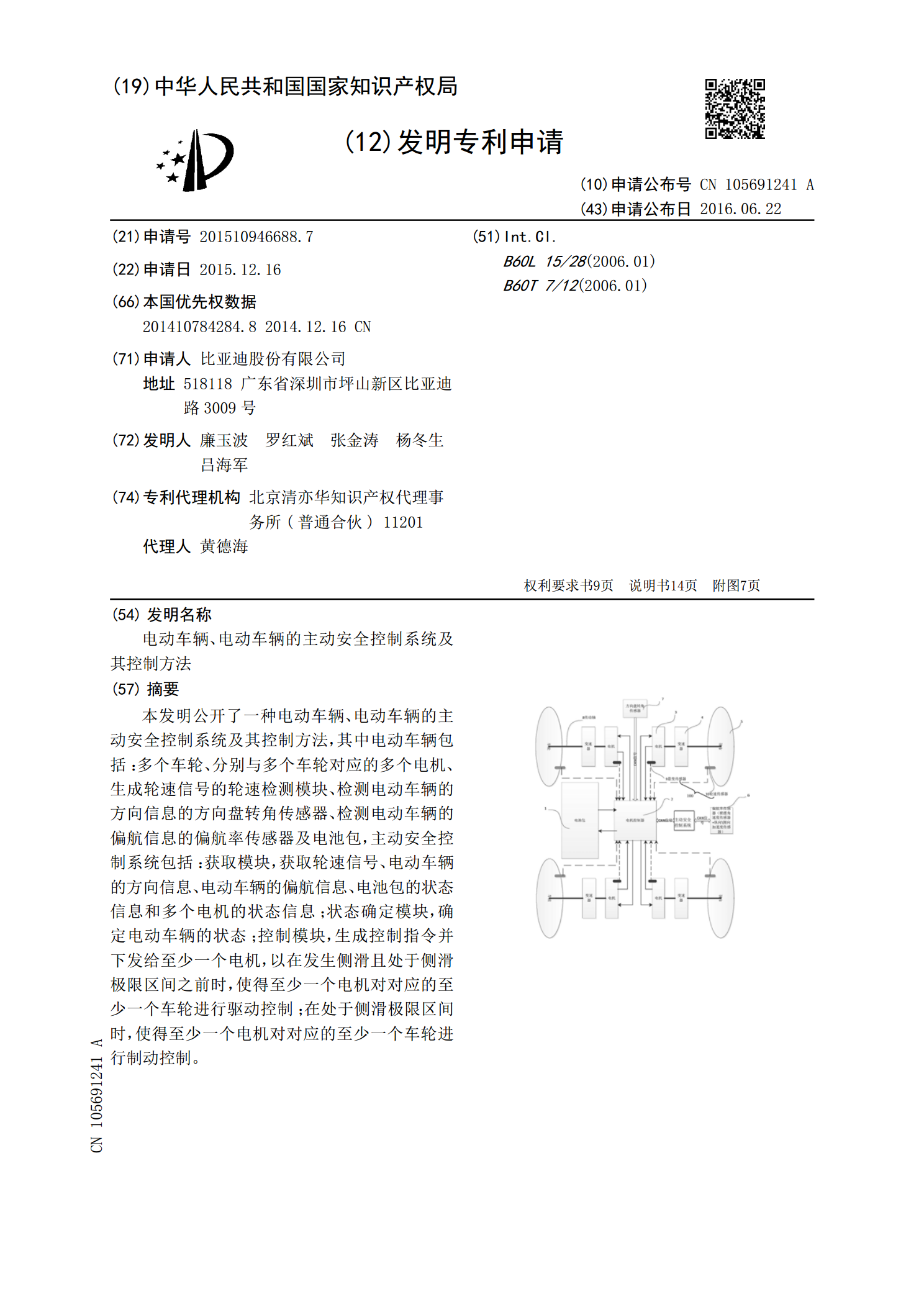
本发明公开了一种电动车辆、电动车辆的主动安全控制系统及其控制方法,其中电动车辆包括:多个车轮、分别与多个车轮对应的多个电机、生成轮速信号的轮速检测模块、检测电动车辆的方向信息的方向盘转角传感器、检测电动车辆的偏航信息的偏航率传感器及电池包,主动安全控制系统包括:获取模块,获取轮速信号、电动车辆的方向信息、电动车辆的偏航信息、电池包的状态信息和多个电机的状态信息;状态确定模块,确定电动车辆的状态;控制模块,生成控制指令并下发给至少一个电机,以在发生侧滑且处于侧滑极限区间之前时,使得至少一个电机对对应的至少一
电动车辆及其主动安全控制系统和方法.pdf
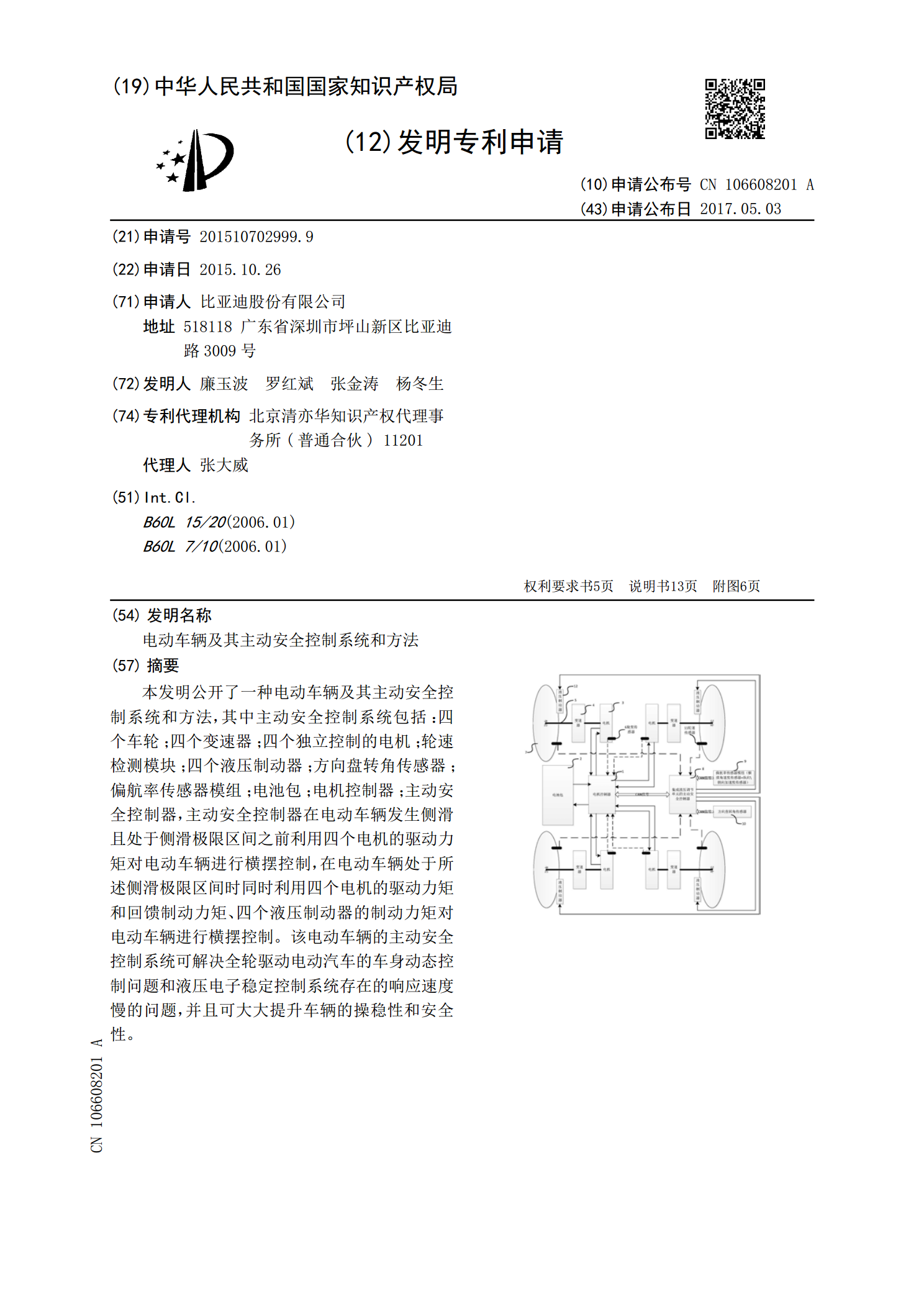
本发明公开了一种电动车辆及其主动安全控制系统和方法,其中主动安全控制系统包括:四个车轮;四个变速器;四个独立控制的电机;轮速检测模块;四个液压制动器;方向盘转角传感器;偏航率传感器模组;电池包;电机控制器;主动安全控制器,主动安全控制器在电动车辆发生侧滑且处于侧滑极限区间之前利用四个电机的驱动力矩对电动车辆进行横摆控制,在电动车辆处于所述侧滑极限区间时同时利用四个电机的驱动力矩和回馈制动力矩、四个液压制动器的制动力矩对电动车辆进行横摆控制。该电动车辆的主动安全控制系统可解决全轮驱动电动汽车的车身动态控制问
电动车辆的控制装置、电动车辆的控制系统及电动车辆的控制方法.pdf
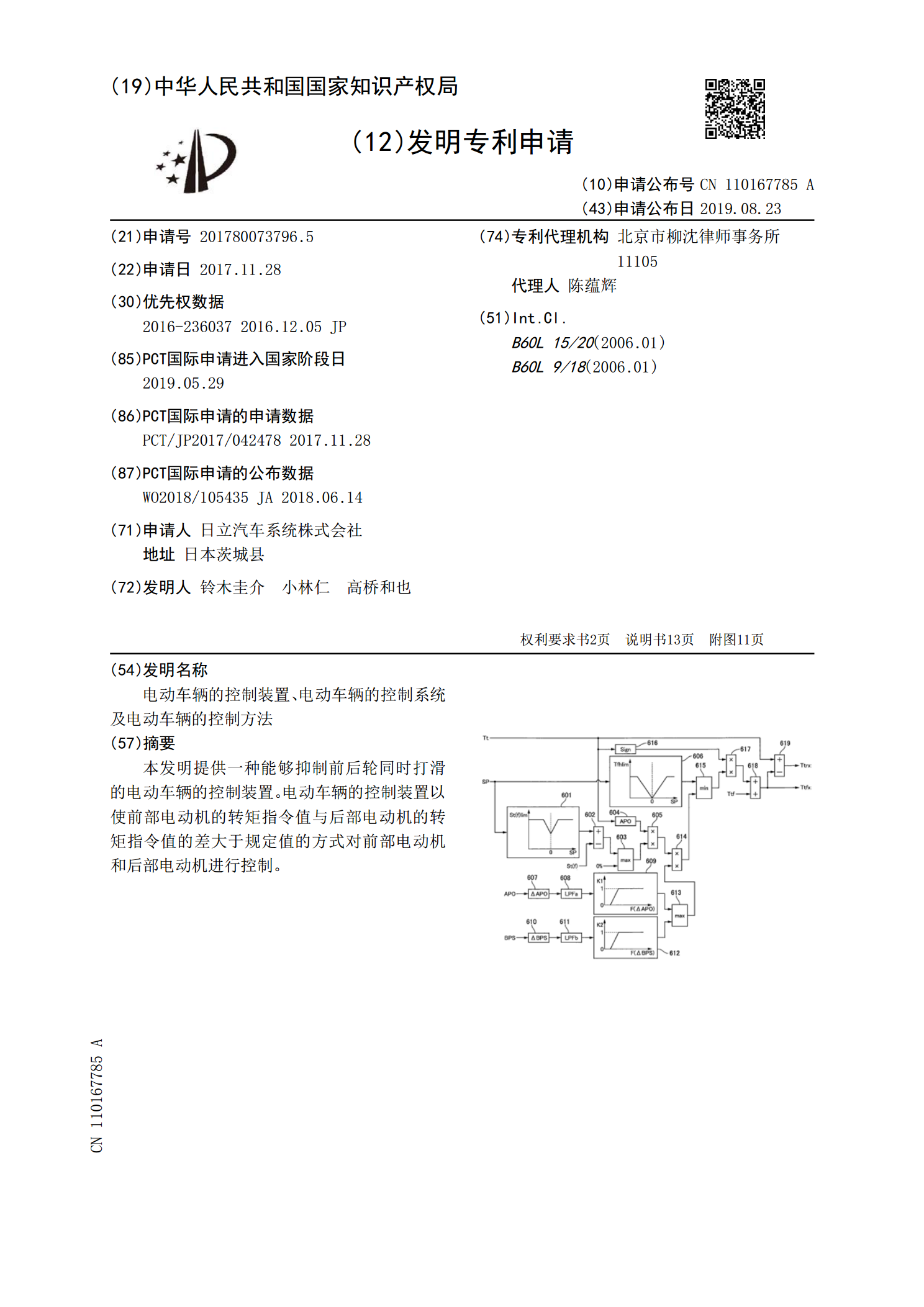
本发明提供一种能够抑制前后轮同时打滑的电动车辆的控制装置。电动车辆的控制装置以使前部电动机的转矩指令值与后部电动机的转矩指令值的差大于规定值的方式对前部电动机和后部电动机进行控制。
电动车辆的控制装置、电动车辆的控制系统及电动车辆的控制方法.pdf
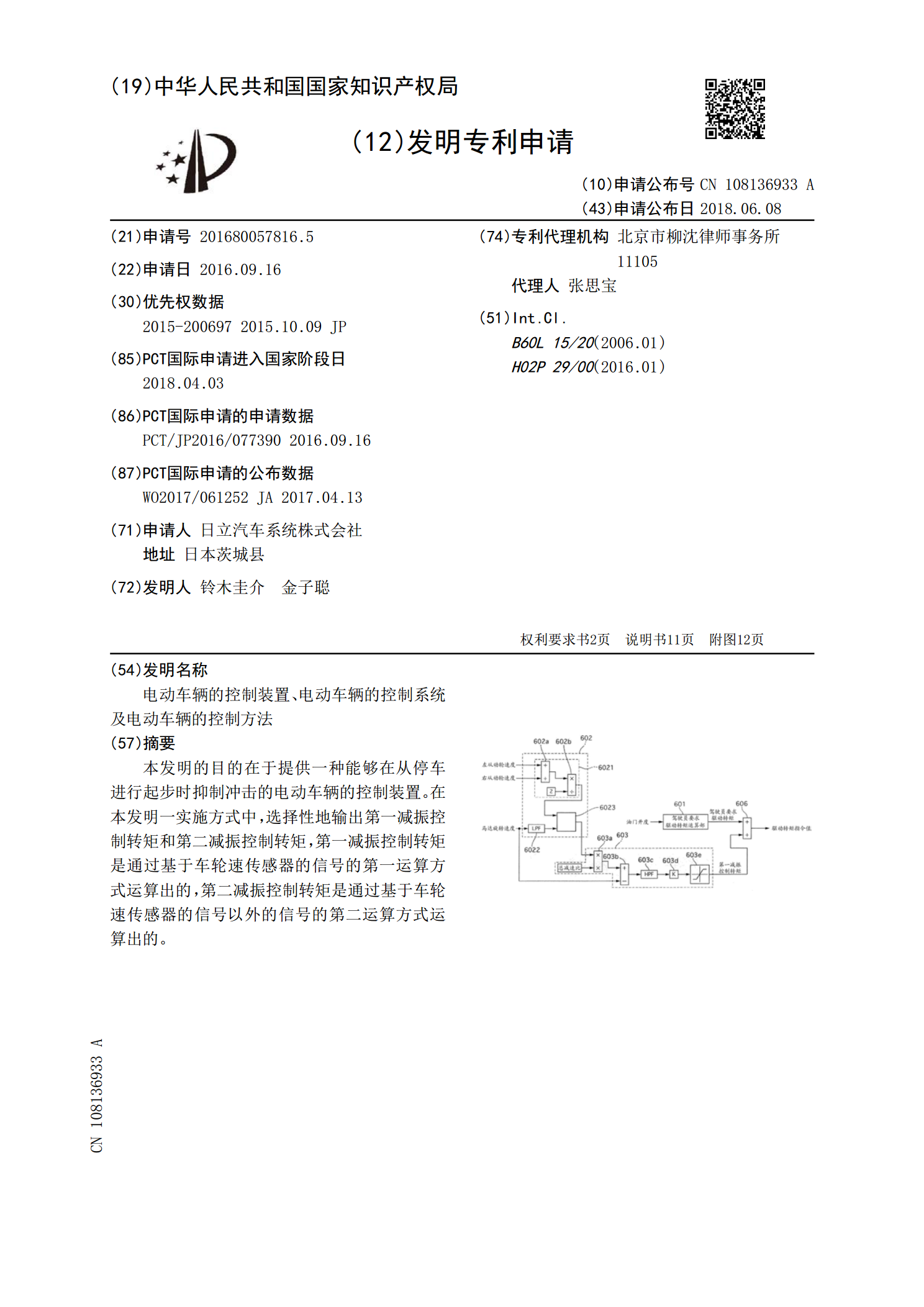
本发明的目的在于提供一种能够在从停车进行起步时抑制冲击的电动车辆的控制装置。在本发明一实施方式中,选择性地输出第一减振控制转矩和第二减振控制转矩,第一减振控制转矩是通过基于车轮速传感器的信号的第一运算方式运算出的,第二减振控制转矩是通过基于车轮速传感器的信号以外的信号的第二运算方式运算出的。
电动车辆的控制装置、电动车辆的控制系统及电动车辆的控制方法.pdf
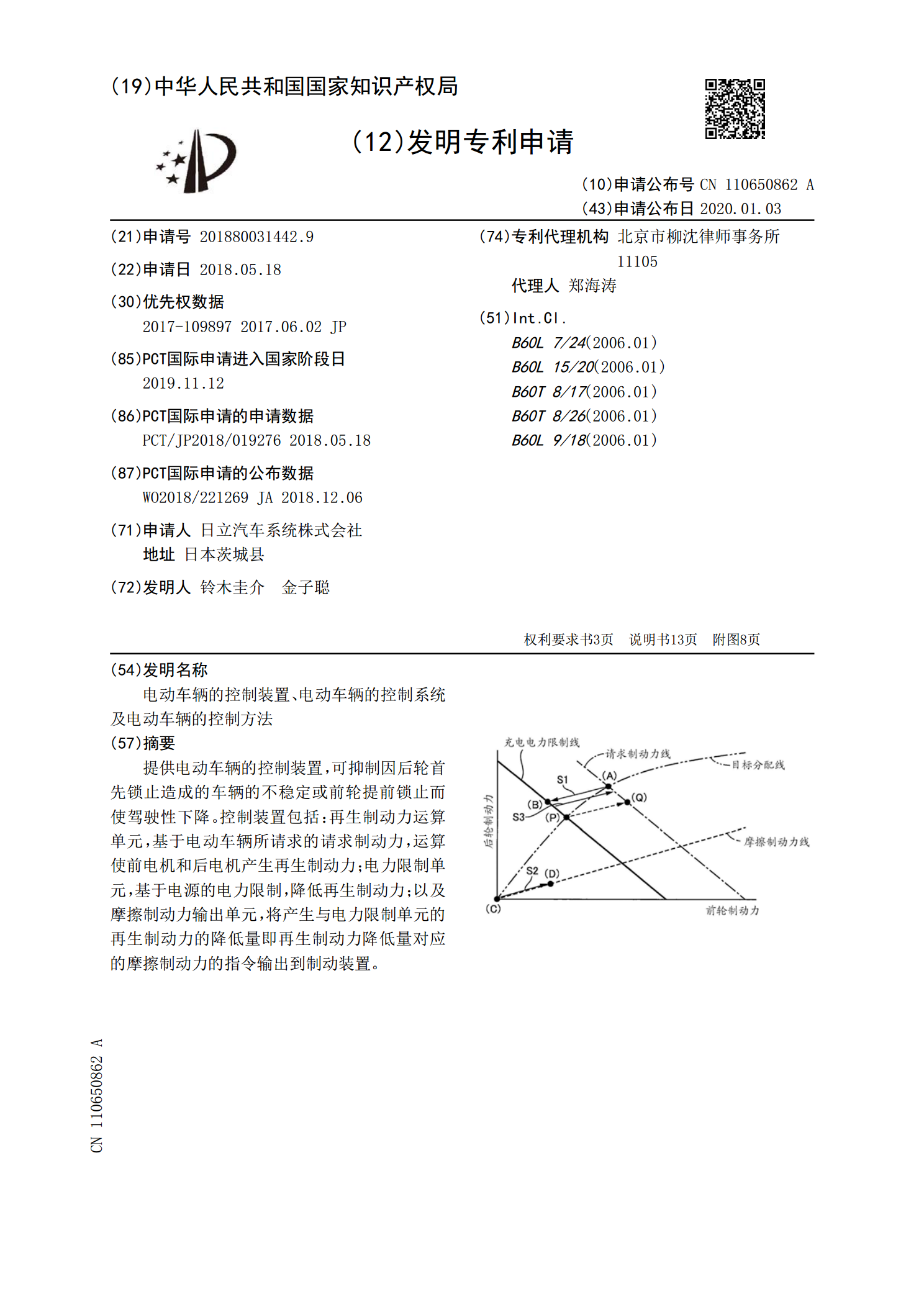
提供电动车辆的控制装置,可抑制因后轮首先锁止造成的车辆的不稳定或前轮提前锁止而使驾驶性下降。控制装置包括:再生制动力运算单元,基于电动车辆所请求的请求制动力,运算使前电机和后电机产生再生制动力;电力限制单元,基于电源的电力限制,降低再生制动力;以及摩擦制动力输出单元,将产生与电力限制单元的再生制动力的降低量即再生制动力降低量对应的摩擦制动力的指令输出到制动装置。