
使用推算定位法追踪车辆位置和车辆方位角的方法以及实现该方法的追踪装置.pdf

元枫****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

使用推算定位法追踪车辆位置和车辆方位角的方法以及实现该方法的追踪装置.pdf
通过使用来自于安装在前轮(3a,3b)处的轮标记单元(5a,5b)的轮标记次数,来追踪车辆的位置(xref)和方位角(H)。由所述车辆的位置(xref)和方位角(H)计算出速度(v)和转首角速度(h)。上述计算基于中间轮偏转角(δ)。根据方程其中使用精确解完成上述计算取决于左、右轮速vl,vr。根据更为简单的方程计算出近似解δapp。并在近似解δapp没有明显偏离精确解δex的任何情况下使用近似解δapp,即:δapp不大于轮偏转角的阀值δthr。仅当δapp>δthr,其中偏离程度大于2°或优选为1°时
一种车辆定位追踪装置以及方法、车辆.pdf
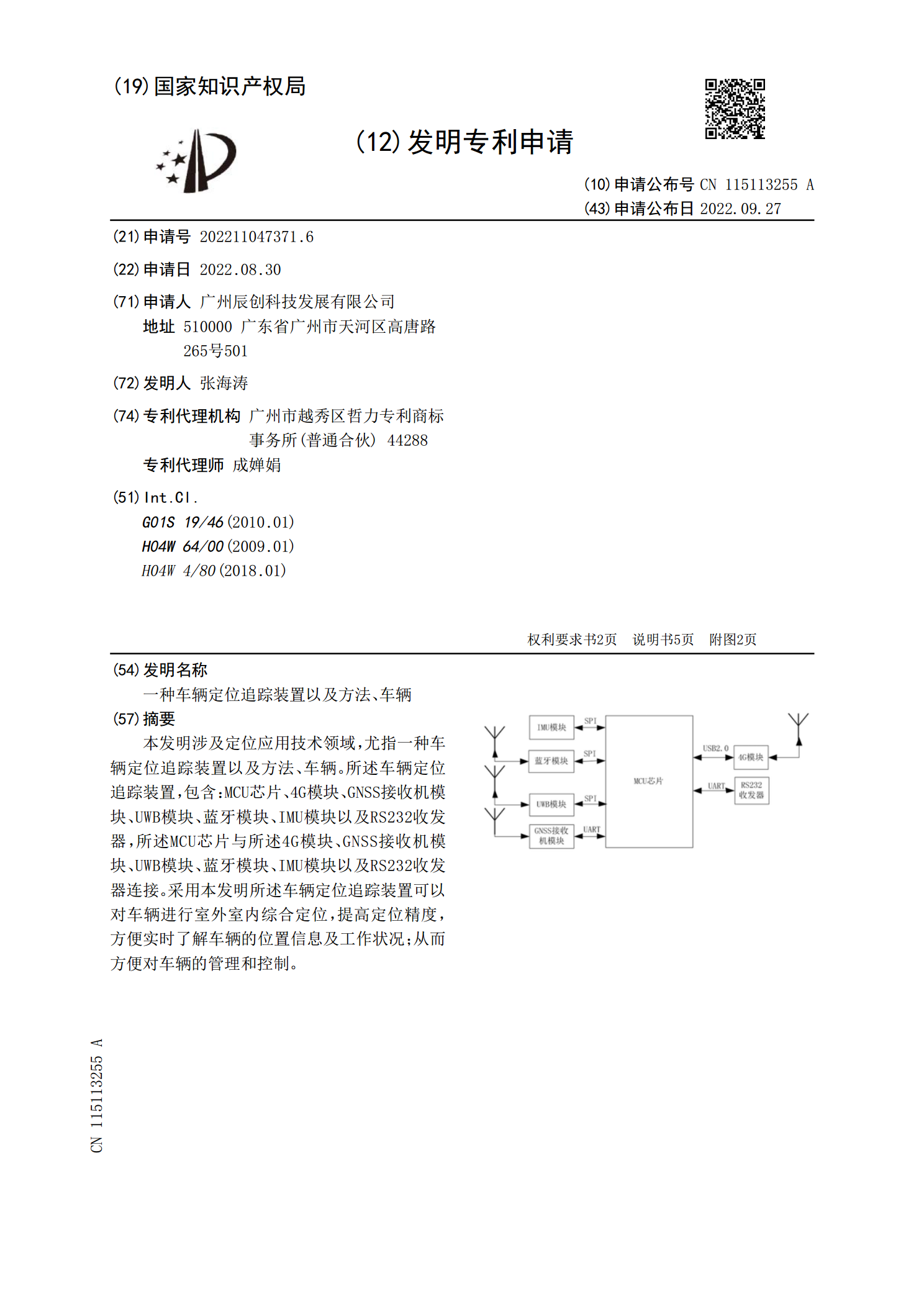
本发明涉及定位应用技术领域,尤指一种车辆定位追踪装置以及方法、车辆。所述车辆定位追踪装置,包含:MCU芯片、4G模块、GNSS接收机模块、UWB模块、蓝牙模块、IMU模块以及RS232收发器,所述MCU芯片与所述4G模块、GNSS接收机模块、UWB模块、蓝牙模块、IMU模块以及RS232收发器连接。采用本发明所述车辆定位追踪装置可以对车辆进行室外室内综合定位,提高定位精度,方便实时了解车辆的位置信息及工作状况;从而方便对车辆的管理和控制。

用于追踪外围车辆位置的装置和方法.pdf
本发明提供一种用于追踪外围车辆位置的装置和方法。该装置包括:处理器;存储器;图像获取单元,被配置成接收来自于布置在车辆上的一个或多个摄像机的一个或多个图像;外围车辆检测单元,被配置成分析一个或多个图像以检测在一个或多个图像中的外围车辆;位置追踪单元,被配置成追踪在一个或多个图像中检测到的外围车辆的位置;视角转换单元,被配置成通过基于所述外围车辆的追踪位置对外围图像的视角进行转换,从而生成视角转换图像;以及输出控制单元,被配置成将视角转换图像输出到设置在该车辆中的显示器。

一种车辆位置追踪定位系统及其方法.pdf
本发明涉及车辆定位系统技术领域,尤其涉及一种车辆位置追踪定位系统及其方法,包括车载娱乐系统、装设于所述车载娱乐系统内的且带有定位功能的无线通讯模块、以及装设有导航APP的移动电子设备;所述车载娱乐系统获取ACCOFF信号后启动无线通讯模块;所述无线通讯模块获取车辆位置信息,并通过无线通讯网络传输至所述移动电子设备;所述移动电子设备接收到车辆位置信息,根据所述车辆位置信息启动导航。本发明的发明目的在于提供一种车辆位置追踪定位系统及其方法,采用本发明提供的技术方案解决了现有汽车在GPS信号弱的地方无法精确定

违法车辆追踪方法及装置.pdf
本发明公开了一种违法车辆追踪方法,包括:建立车辆外型数据库,在车辆外型数据库中储存所有车辆出厂时的车型及颜色;获取违法车辆照片,经图像分析得到该违法车辆的外型轮廊和颜色、参照车型、参照颜色、车型变形特征、颜色变化特征;经图像分析得到与所有车辆照片对应的外型轮廊和颜色、车型和颜色,筛选得到一个或多个嫌疑车辆;车型变形特征和颜色变化特征比较,得到对应的嫌疑车辆目前所在的监控区域,跟踪定位该嫌疑车辆;从正面照片和/或背面照片中获取嫌疑车辆的车牌号。具有减少数据处理量,精准追踪违法车辆的有益效果。本发明还公开了基