
四轮驱动车辆的驱动力分配控制装置.pdf

哲妍****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四轮驱动车辆的驱动力分配控制装置.pdf
一种四轮驱动车辆的驱动力分配控制装置,在步骤(S14)中判定为过转向时,在步骤(S17)中将后轮合计驱动力用的反馈控制系数(K1)设为0,将后轮驱动力差用的反馈控制系数(K2)也设为0,由此形成为二轮驱动状态。因此,能够避免在过转向状态下进行四轮驱动行驶带来的转弯行驶不稳定。在步骤(S15)中判定为转向不足时,在步骤(S18)设为K1=1,且设为K2=0,由此,即使进行四轮驱动行驶在左右后轮间也不设定驱动力差。因此,能够在转向不足状态下享受四轮驱动行驶带来的优异的驾驶性,能够避免在左右后轮间设定驱动力差带

四轮驱动车辆的驱动力分配控制装置.pdf
一种四轮驱动车辆的驱动力分配控制装置,在后轮合计驱动力(TcLR)不足后轮驱动力差(ΔTcLR),通过后轮合计驱动力(TcLR)的左右分配不能实现后轮驱动力差(ΔTcLR)的情况下,在内轮侧目标驱动力(TcIN)中无条件地设定防止三轮驱动行驶状态所需的最小限度的初期驱动力(TcMIN),再如(c)所示,将外轮侧目标驱动力(TcOUT)设定为在内轮侧目标驱动力(TcIN)=初期驱动力(TcMIN)下能够实现后轮驱动力差(ΔTcLR)的值、即决定初期驱动力(TcMIN)及后轮驱动力差(ΔTcLR)的和值。于是
四轮驱动车辆的驱动力控制装置.pdf
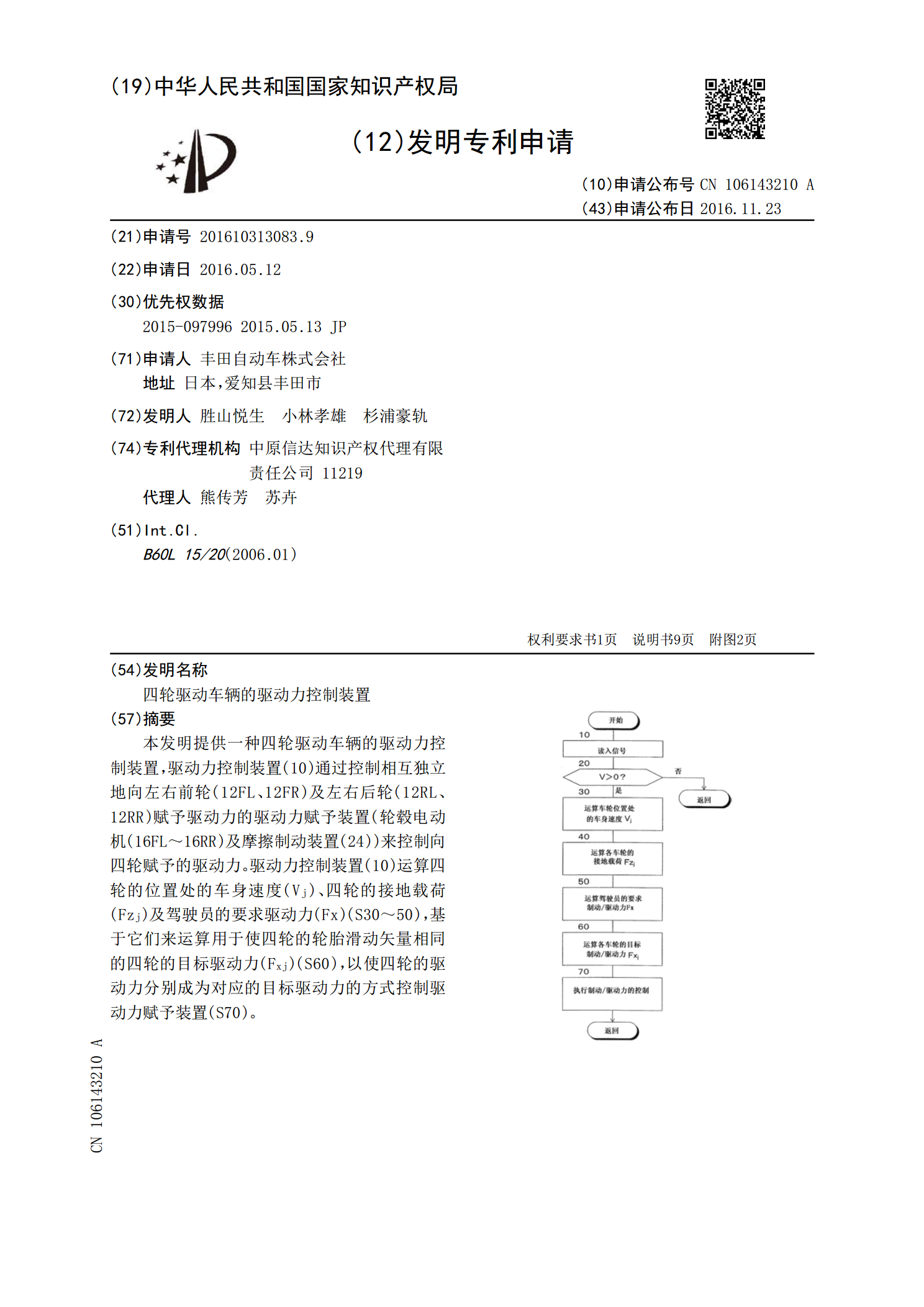
本发明提供一种四轮驱动车辆的驱动力控制装置,驱动力控制装置(10)通过控制相互独立地向左右前轮(12FL、12FR)及左右后轮(12RL、12RR)赋予驱动力的驱动力赋予装置(轮毂电动机(16FL~16RR)及摩擦制动装置(24))来控制向四轮赋予的驱动力。驱动力控制装置(10)运算四轮的位置处的车身速度(V

四轮驱动车辆的驱动力控制装置.pdf
本发明提供一种四轮驱动车辆的驱动力控制装置,其通过恰当地控制向副驱动轮分配的驱动力,能够避免在驾驶者意料之外的状况下发生转向过小或转向过大。该四轮驱动车辆的驱动力控制装置进行以下控制:通过控制由前后扭矩分配用离合器(10)分配给后轮(Wr、Wr)的驱动力,来将前轮(Wf、Wf)作为主驱动轮,将后轮(Wr、Wr)作为副驱动轮,其中,在计算供驱动分配装置(10)分配给后轮(Wr、Wr)的四轮驱动扭矩时,进行以下控制:根据车辆的推定驱动力和车辆的转向角来限制该四轮驱动扭矩的上限值。由此,能够避免在驾驶者意料之外

四轮驱动车辆的驱动力控制装置.pdf
在不导致四轮驱动机构的大型化、重量增加以及成本增加等的情况下,以比较简单的控制在从动轮之间的差动旋转变得过大的状况下有效保护差速器等机构。一种四轮驱动车辆的驱动力控制装置,其通过由设置于传动轴(7)与后差速器(11)之间的前后扭矩分配用离合器(10)控制分配到后轮(W3、W4)的驱动力,进行将前轮(W1、W2)作为主驱动轮、后轮(W3、W4)作为副驱动轮的控制,在由车速传感器(S8)检测出的车体速度为120km以下的状态下,由左右后轮速度传感器(S3、S4)检测出的后轮车轮速度左右差为80km以上的状态持