
跨轨道自行底盘及其自动转向控制方法.pdf

朋兴****en


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

跨轨道自行底盘及其自动转向控制方法.pdf
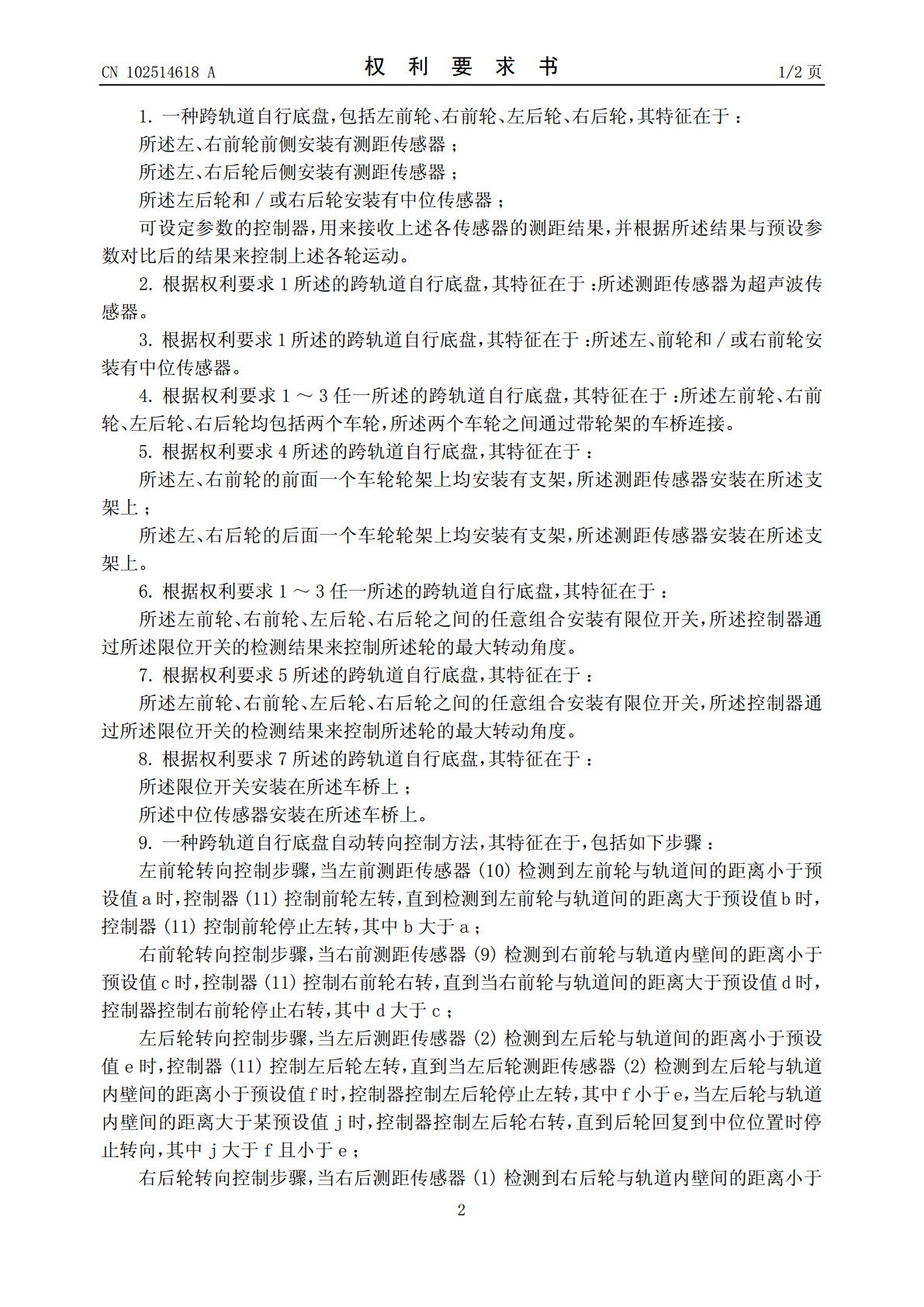
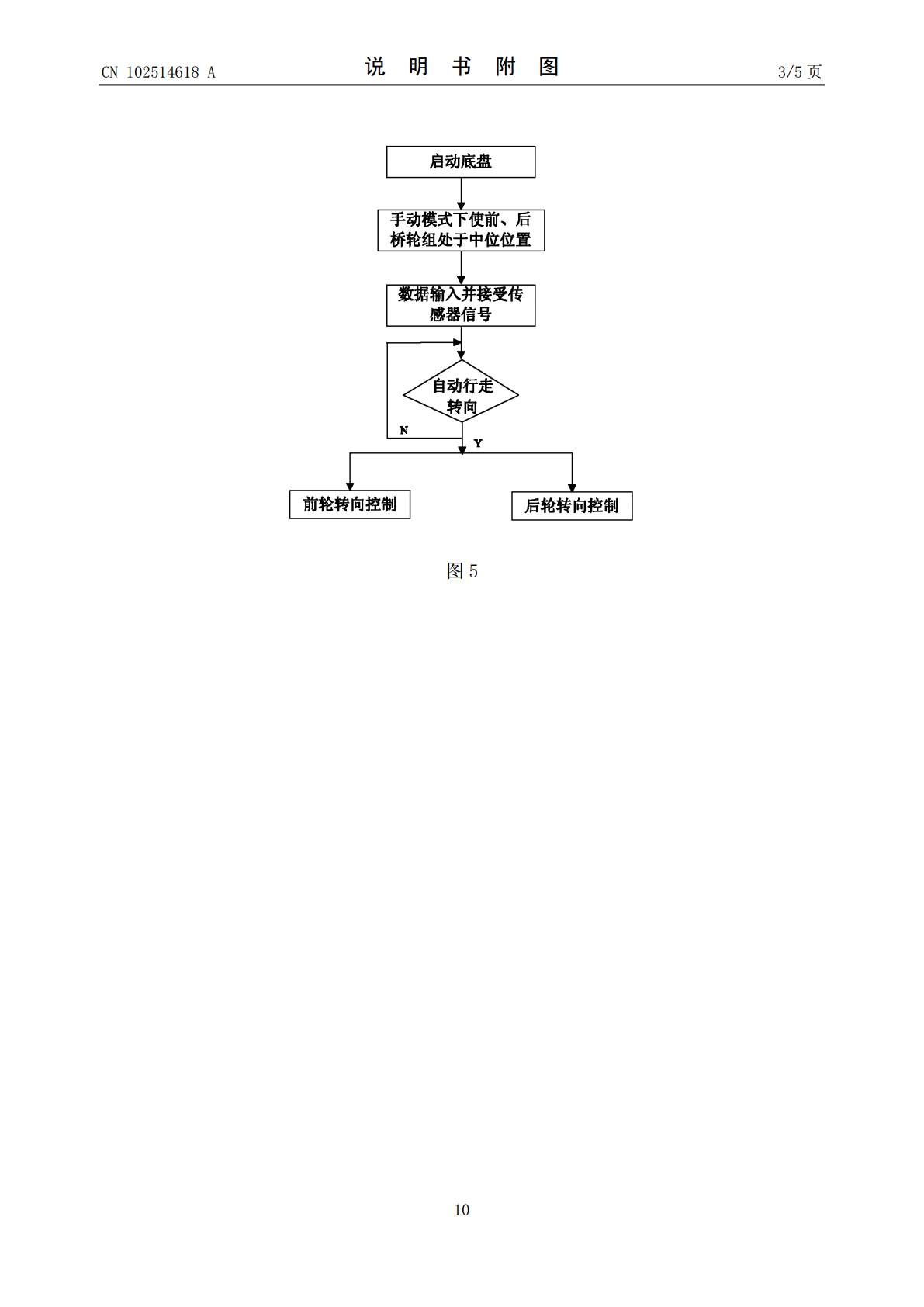
本发明提出了一种跨轨道自行底盘自动转向控制系统及方法。该系统包括控制器、左前测距传感器、右前测距传感器、左后测距传感器和右后测距传感器。左前测距传感器用于实时检测左前轮与轨道间的距离,右前测距传感器用于实时检测右前轮与轨道间的距离,左后测距传感器用于实时检测左后轮与轨道间的距离,右后测距传感器用于实时测量跨轨道自行底盘右后轮与轨道间的距离。控制器接收各传感器发送的检测结果,并根据各检测结果控制底盘行走。本发明能够自动引导底盘行走,控制方法简单,测距传感器少,不容易因传感器故障而产生误动作损坏路基和设备;另

可自动转向的跨轨道砂浆车底盘及砂浆车.pdf
本发明公开了一种可自动转向的跨轨道砂浆车底盘及砂浆车,该砂浆车底盘包括车架、控制组件以及固定于车架底部的一个以上的轮组,轮组包括行走支架、车轮、转向组件以及驱动组件,行走支架上装设有一个以上用来检测车轮与行走轨道内侧壁之间距离的测距传感器,控制组件接收测距传感器采集的距离信号并根据该距离信号判断是否安全后输出控制信号至转向组件。该砂浆车包括上述砂浆车底盘以及安装于砂浆车底盘上的砂浆上装。本发明具有结构简单紧凑、成本低廉、适用范围广、能够保证行走的安全性和可靠性等优点。
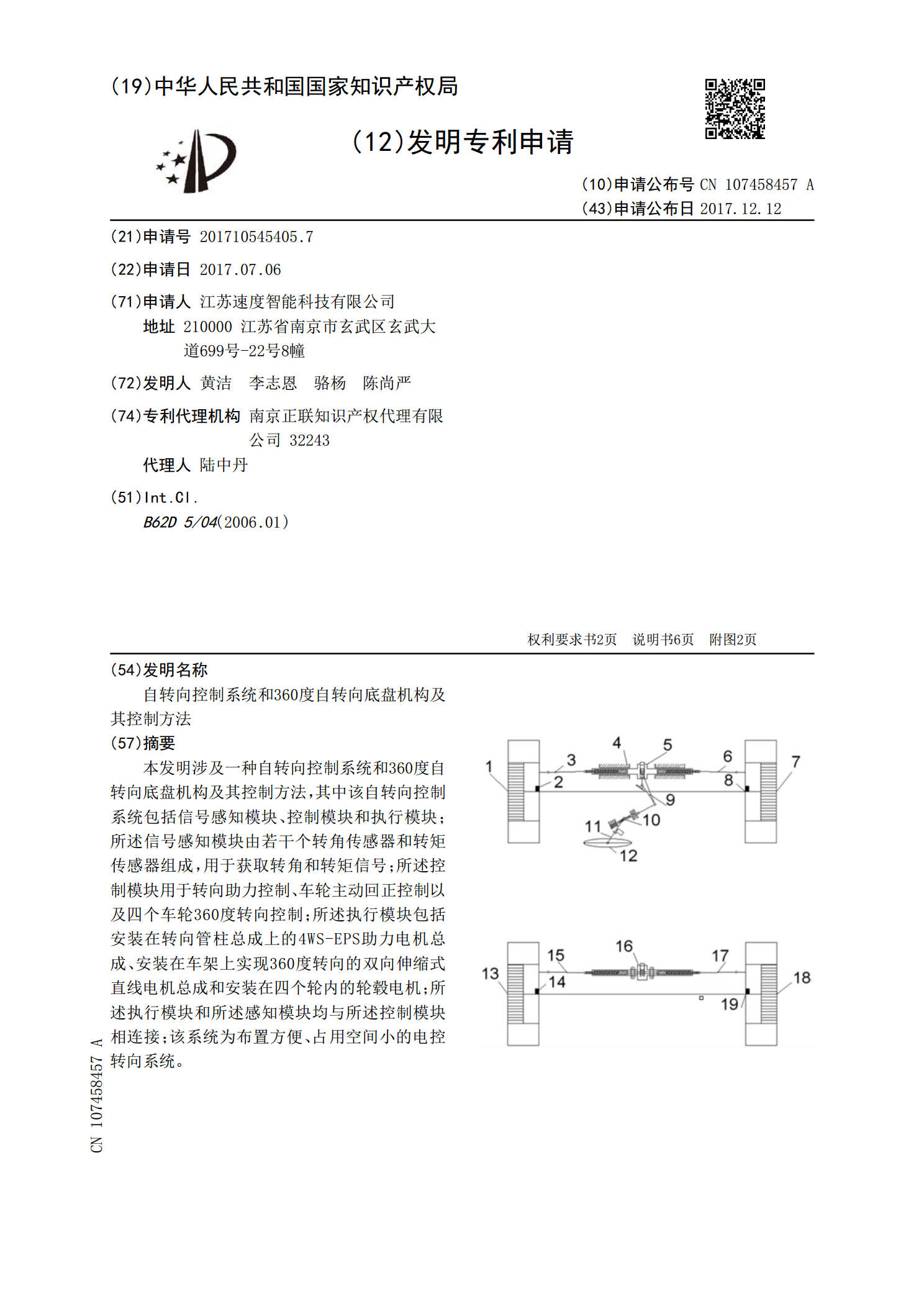
自转向控制系统和360度自转向底盘机构及其控制方法.pdf
本发明涉及一种自转向控制系统和360度自转向底盘机构及其控制方法,其中该自转向控制系统包括信号感知模块、控制模块和执行模块;所述信号感知模块由若干个转角传感器和转矩传感器组成,用于获取转角和转矩信号;所述控制模块用于转向助力控制、车轮主动回正控制以及四个车轮360度转向控制;所述执行模块包括安装在转向管柱总成上的4WS‑EPS助力电机总成、安装在车架上实现360度转向的双向伸缩式直线电机总成和安装在四个轮内的轮毂电机;所述执行模块和所述感知模块均与所述控制模块相连接;该系统为布置方便、占用空间小的电控转向
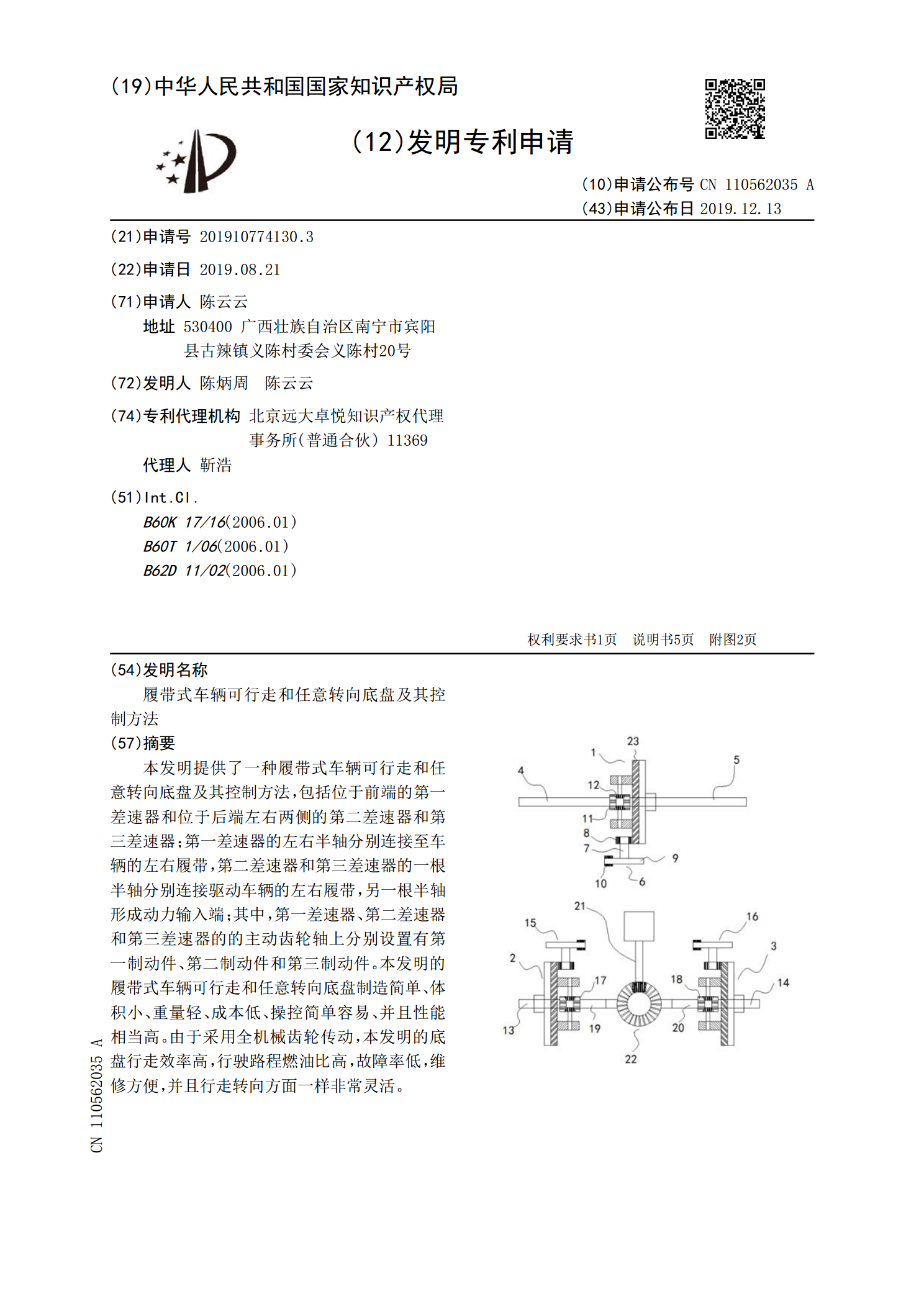
履带式车辆可行走和任意转向底盘及其控制方法.pdf
本发明提供了一种履带式车辆可行走和任意转向底盘及其控制方法,包括位于前端的第一差速器和位于后端左右两侧的第二差速器和第三差速器;第一差速器的左右半轴分别连接至车辆的左右履带,第二差速器和第三差速器的一根半轴分别连接驱动车辆的左右履带,另一根半轴形成动力输入端;其中,第一差速器、第二差速器和第三差速器的的主动齿轮轴上分别设置有第一制动件、第二制动件和第三制动件。本发明的履带式车辆可行走和任意转向底盘制造简单、体积小、重量轻、成本低、操控简单容易、并且性能相当高。由于采用全机械齿轮传动,本发明的底盘行走效率高
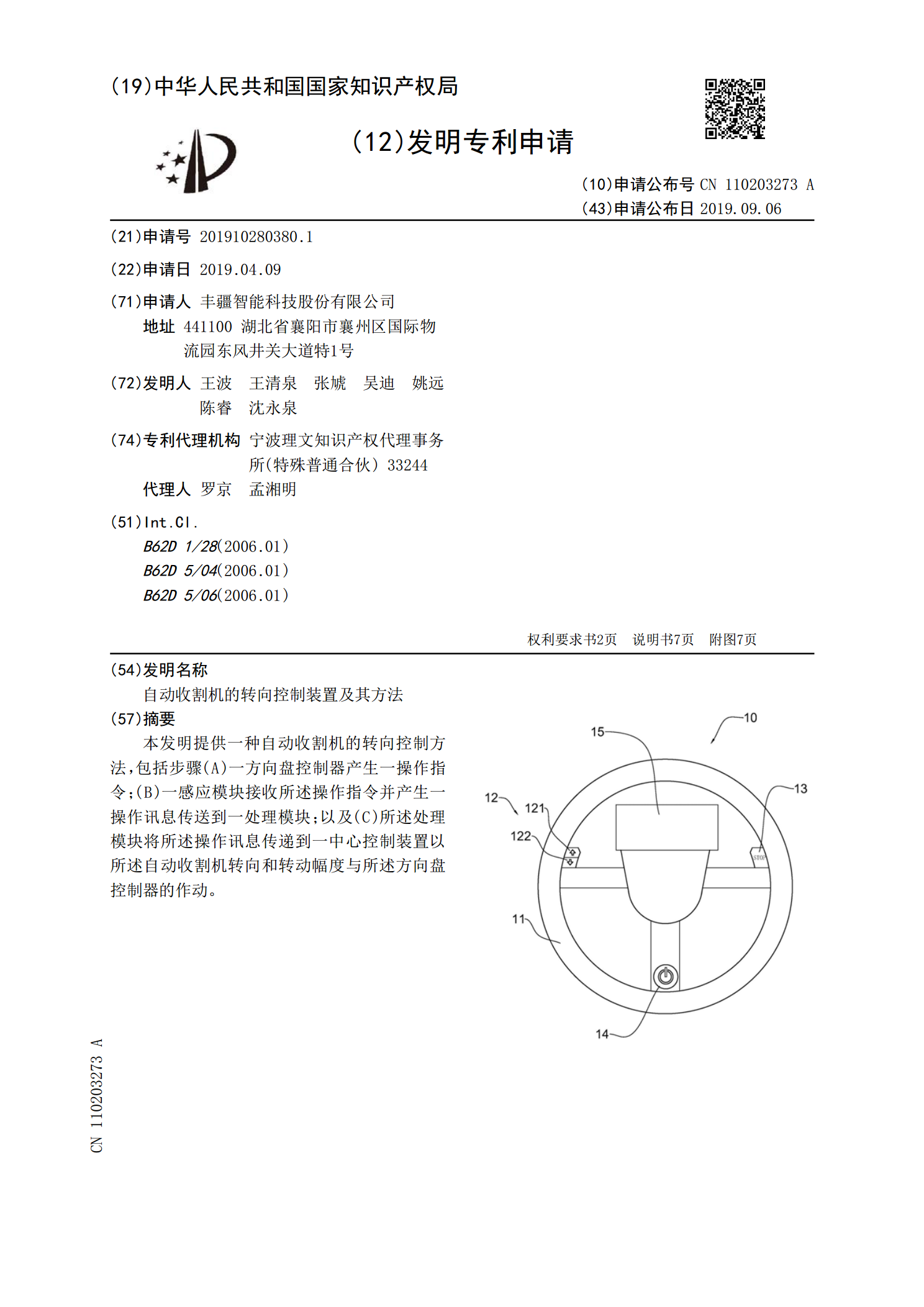
自动收割机的转向控制装置及其方法.pdf
本发明提供一种自动收割机的转向控制方法,包括步骤(A)一方向盘控制器产生一操作指令;(B)一感应模块接收所述操作指令并产生一操作讯息传送到一处理模块;以及(C)所述处理模块将所述操作讯息传递到一中心控制装置以所述自动收割机转向和转动幅度与所述方向盘控制器的作动。