
自转向控制系统和360度自转向底盘机构及其控制方法.pdf

海昌****姐淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自转向控制系统和360度自转向底盘机构及其控制方法.pdf
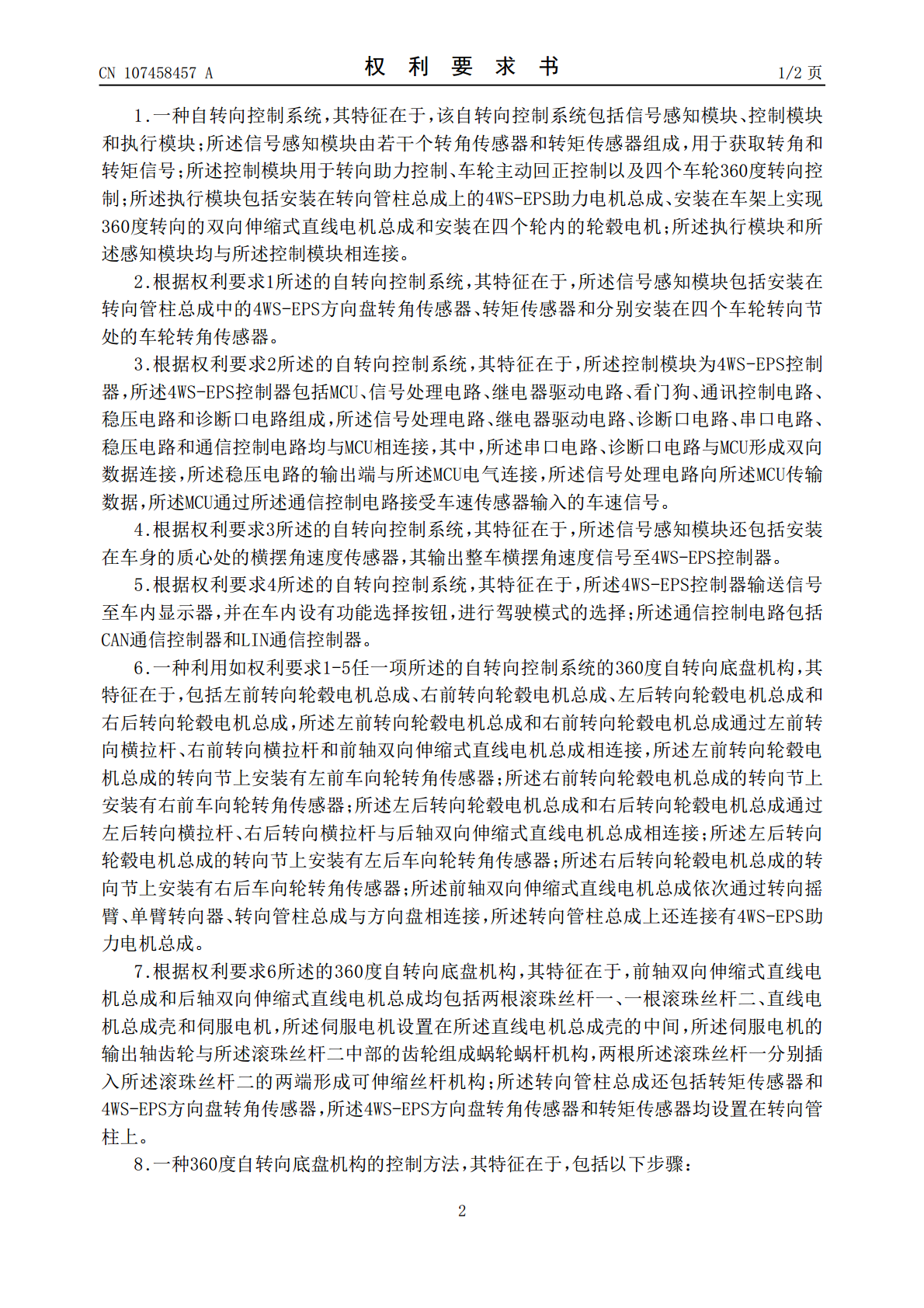
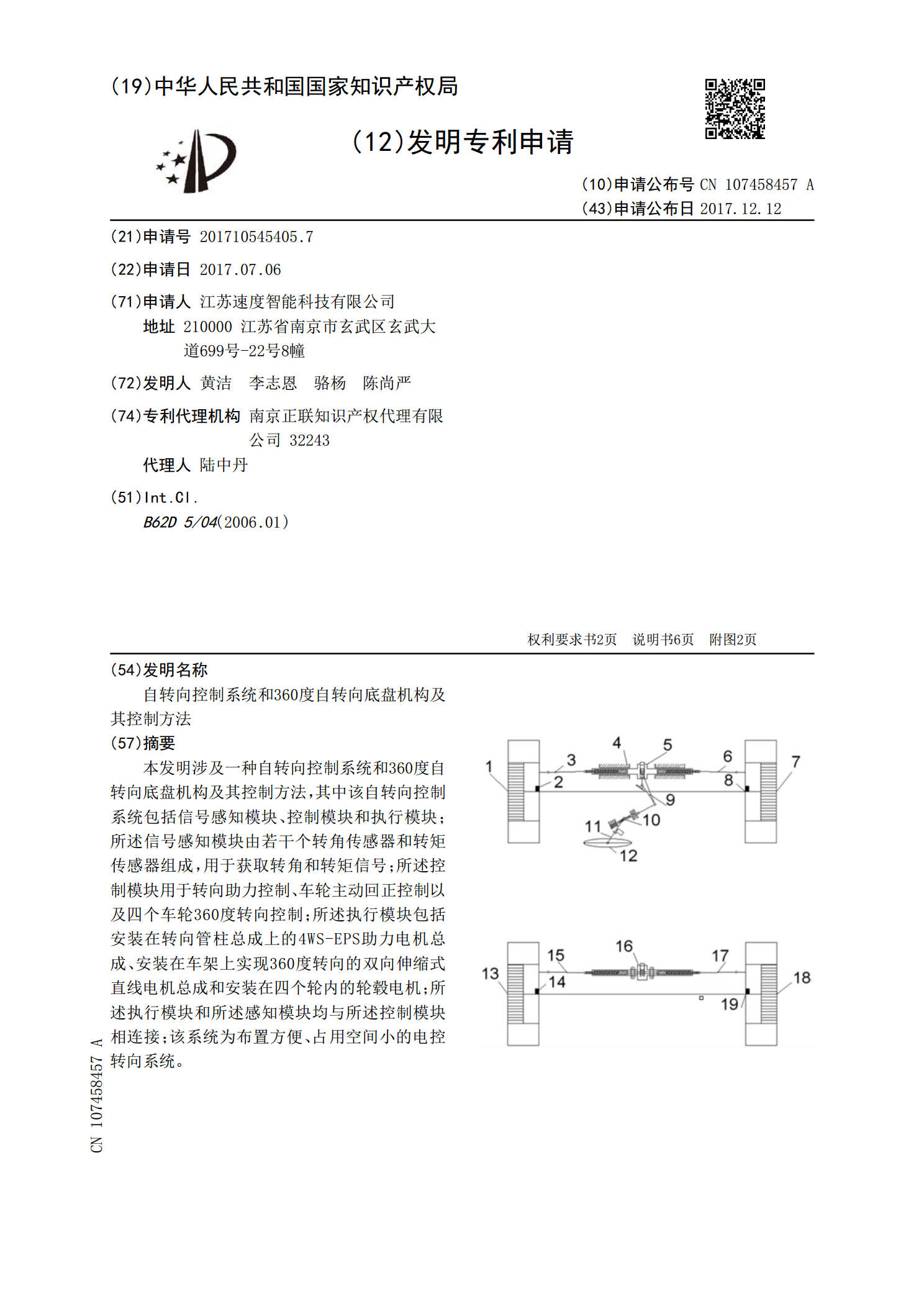
本发明涉及一种自转向控制系统和360度自转向底盘机构及其控制方法,其中该自转向控制系统包括信号感知模块、控制模块和执行模块;所述信号感知模块由若干个转角传感器和转矩传感器组成,用于获取转角和转矩信号;所述控制模块用于转向助力控制、车轮主动回正控制以及四个车轮360度转向控制;所述执行模块包括安装在转向管柱总成上的4WS‑EPS助力电机总成、安装在车架上实现360度转向的双向伸缩式直线电机总成和安装在四个轮内的轮毂电机;所述执行模块和所述感知模块均与所述控制模块相连接;该系统为布置方便、占用空间小的电控转向
转向控制系统和用于控制转向的方法.pdf
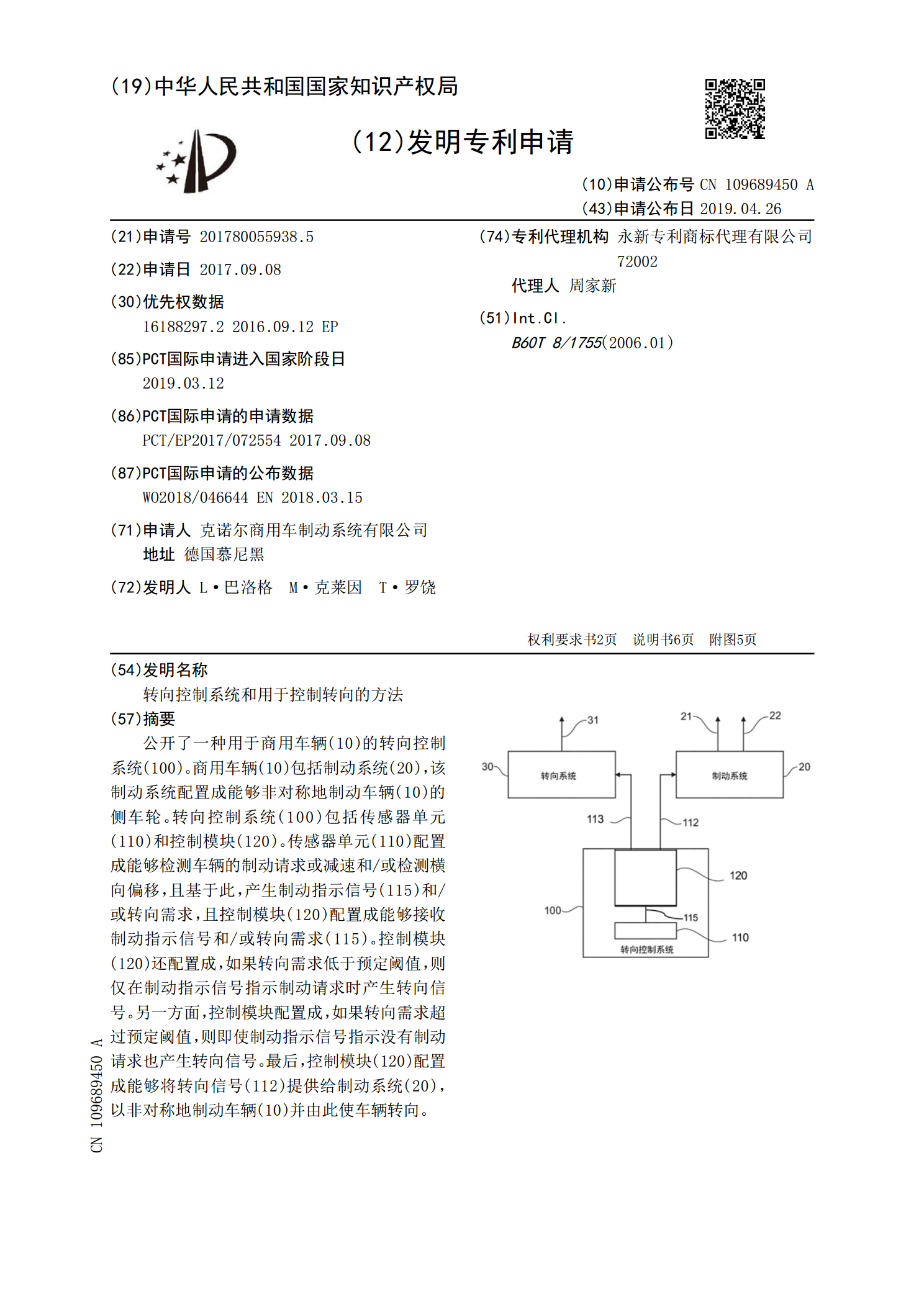
公开了一种用于商用车辆(10)的转向控制系统(100)。商用车辆(10)包括制动系统(20),该制动系统配置成能够非对称地制动车辆(10)的侧车轮。转向控制系统(100)包括传感器单元(110)和控制模块(120)。传感器单元(110)配置成能够检测车辆的制动请求或减速和/或检测横向偏移,且基于此,产生制动指示信号(115)和/或转向需求,且控制模块(120)配置成能够接收制动指示信号和/或转向需求(115)。控制模块(120)还配置成,如果转向需求低于预定阈值,则仅在制动指示信号指示制动请求时产生转向信

转向控制系统及和用于控制转向的方法.pdf
公开了一种用于商用车辆(10)的转向控制系统(100)。商用车辆(10)包括制动系统(20)和转向系统(30),制动系统(20)配置成能够非对称地制动车辆(10)的侧车轮,转向系统配置成能够响应于转向信号(112,113)使车辆转向(10)。转向控制系统(100)包括选择模块(110)和控制模块(120)。选择模块配置成能够在第一转向模式和第二转向模式之间切换,其中,第一转向模式指示通过转动车轮使车辆(10)转向,第二转向模式指示通过产生用于至少一个车轮的制动信号、从而导致施加到车辆(10)的横摆力矩而使

跨轨道自行底盘及其自动转向控制方法.pdf
本发明提出了一种跨轨道自行底盘自动转向控制系统及方法。该系统包括控制器、左前测距传感器、右前测距传感器、左后测距传感器和右后测距传感器。左前测距传感器用于实时检测左前轮与轨道间的距离,右前测距传感器用于实时检测右前轮与轨道间的距离,左后测距传感器用于实时检测左后轮与轨道间的距离,右后测距传感器用于实时测量跨轨道自行底盘右后轮与轨道间的距离。控制器接收各传感器发送的检测结果,并根据各检测结果控制底盘行走。本发明能够自动引导底盘行走,控制方法简单,测距传感器少,不容易因传感器故障而产生误动作损坏路基和设备;另

带有转向限制机构的车辆和车辆的转向控制方法.pdf
一种车辆,包括:行走机构;转向机构,控制所述行走机构的行进方向;转向限制启动机构;以及转向限制机构,其中,所述转向限制启动机构致动所述转向限制机构以限制行驶中的所述车辆的转向。有利地,所述行走机构包括左侧驱动轮和右侧驱动轮;所述转向限制机构通过调节两侧驱动轮的旋转速度差控制所述行走机构相对于当前行进方向的转向角度。