
履带式车辆可行走和任意转向底盘及其控制方法.pdf

音景****ka


1/9

2/9
3/9
4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
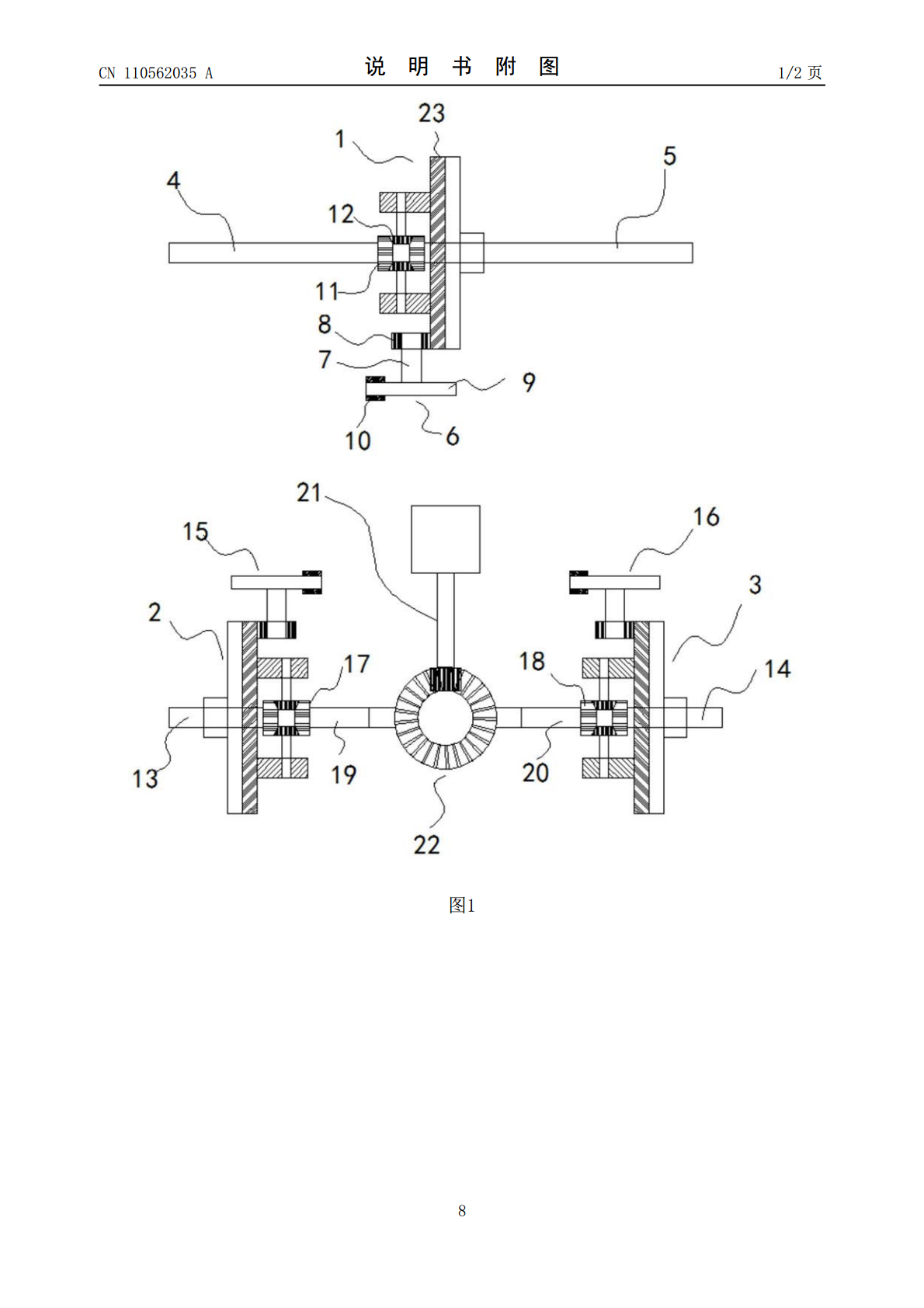
履带式车辆可行走和任意转向底盘及其控制方法.pdf
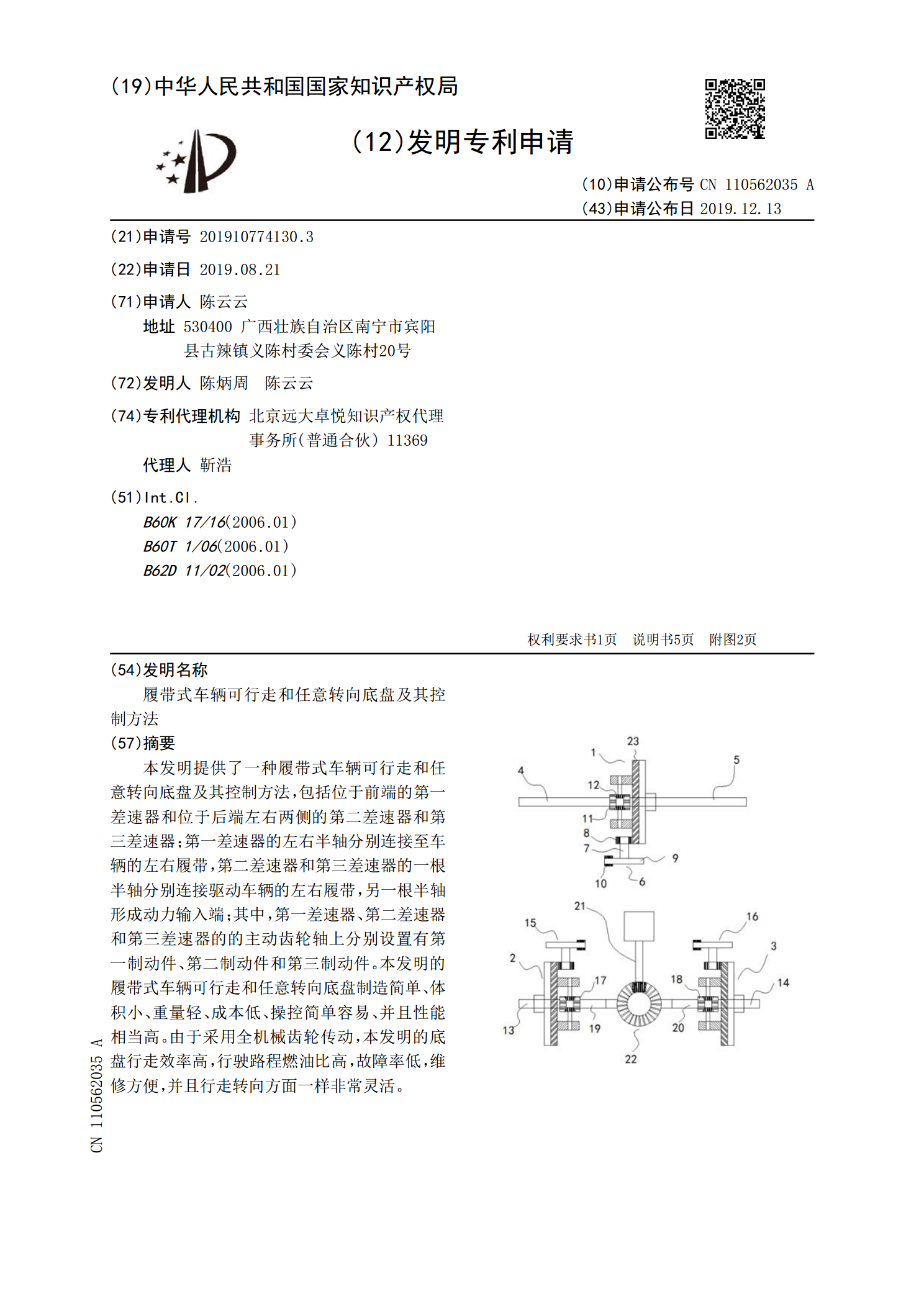
本发明提供了一种履带式车辆可行走和任意转向底盘及其控制方法,包括位于前端的第一差速器和位于后端左右两侧的第二差速器和第三差速器;第一差速器的左右半轴分别连接至车辆的左右履带,第二差速器和第三差速器的一根半轴分别连接驱动车辆的左右履带,另一根半轴形成动力输入端;其中,第一差速器、第二差速器和第三差速器的的主动齿轮轴上分别设置有第一制动件、第二制动件和第三制动件。本发明的履带式车辆可行走和任意转向底盘制造简单、体积小、重量轻、成本低、操控简单容易、并且性能相当高。由于采用全机械齿轮传动,本发明的底盘行走效率高

可转向车辆及其控制方法.pdf
一种用于单独地控制可转向车辆(1、21、31、85)内的每个从动轮(3、6、7、23、27、26、32、33、34)的车轮速度的方法和装置,所述车辆包括前桥(2、22、81)和至少两个后桥(4、5、25、82、83),且具有全轮驱动,所述方法包括如下步骤:记录如下参数和所述参数的值:a.车辆的转向角度,b.车辆的轴距,和c.车辆的轮距;基于车辆行驶期间连续记录的所述参数值来计算每个所述从动轮的、使该从动轮的车轮滑移最小的车轮速度;根据所述计算出的车轮速度单独地控制每个所述从动轮的车轮速度;以及,如果所述轴
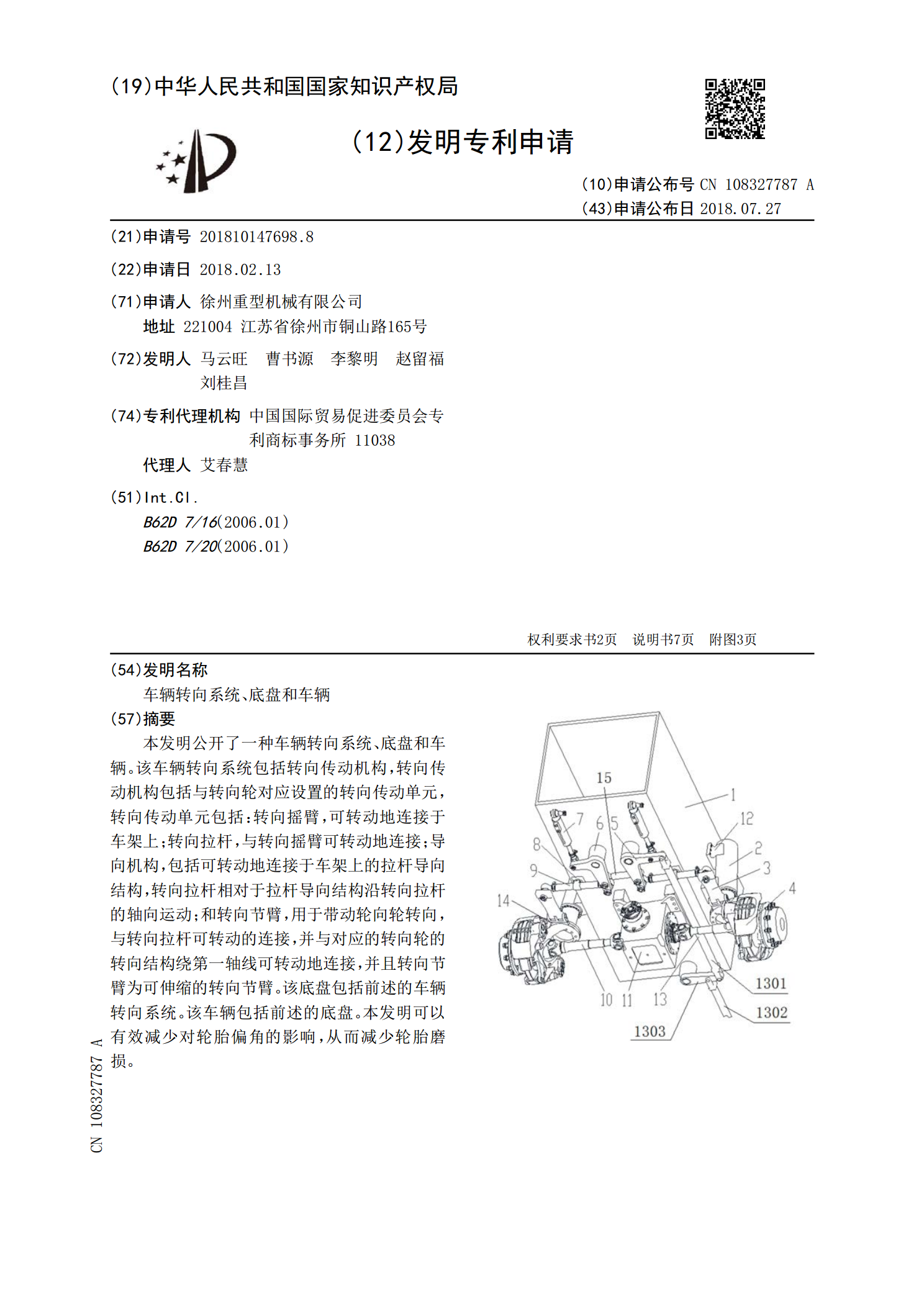
车辆转向系统、底盘和车辆.pdf
本发明公开了一种车辆转向系统、底盘和车辆。该车辆转向系统包括转向传动机构,转向传动机构包括与转向轮对应设置的转向传动单元,转向传动单元包括:转向摇臂,可转动地连接于车架上;转向拉杆,与转向摇臂可转动地连接;导向机构,包括可转动地连接于车架上的拉杆导向结构,转向拉杆相对于拉杆导向结构沿转向拉杆的轴向运动;和转向节臂,用于带动轮向轮转向,与转向拉杆可转动的连接,并与对应的转向轮的转向结构绕第一轴线可转动地连接,并且转向节臂为可伸缩的转向节臂。该底盘包括前述的车辆转向系统。该车辆包括前述的底盘。本发明可以有效减
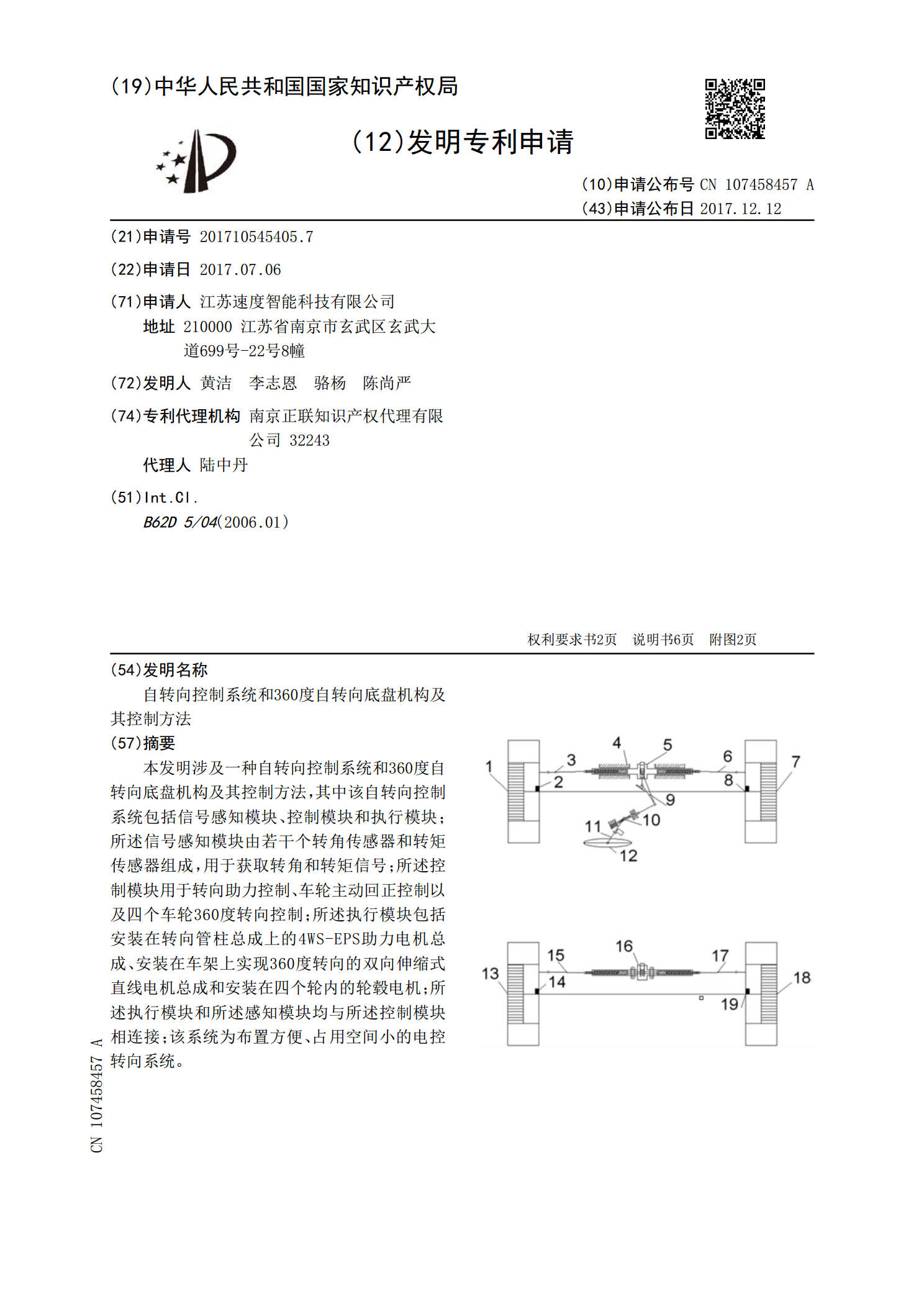
自转向控制系统和360度自转向底盘机构及其控制方法.pdf
本发明涉及一种自转向控制系统和360度自转向底盘机构及其控制方法,其中该自转向控制系统包括信号感知模块、控制模块和执行模块;所述信号感知模块由若干个转角传感器和转矩传感器组成,用于获取转角和转矩信号;所述控制模块用于转向助力控制、车轮主动回正控制以及四个车轮360度转向控制;所述执行模块包括安装在转向管柱总成上的4WS‑EPS助力电机总成、安装在车架上实现360度转向的双向伸缩式直线电机总成和安装在四个轮内的轮毂电机;所述执行模块和所述感知模块均与所述控制模块相连接;该系统为布置方便、占用空间小的电控转向
车辆及其转向失稳控制方法和系统.pdf
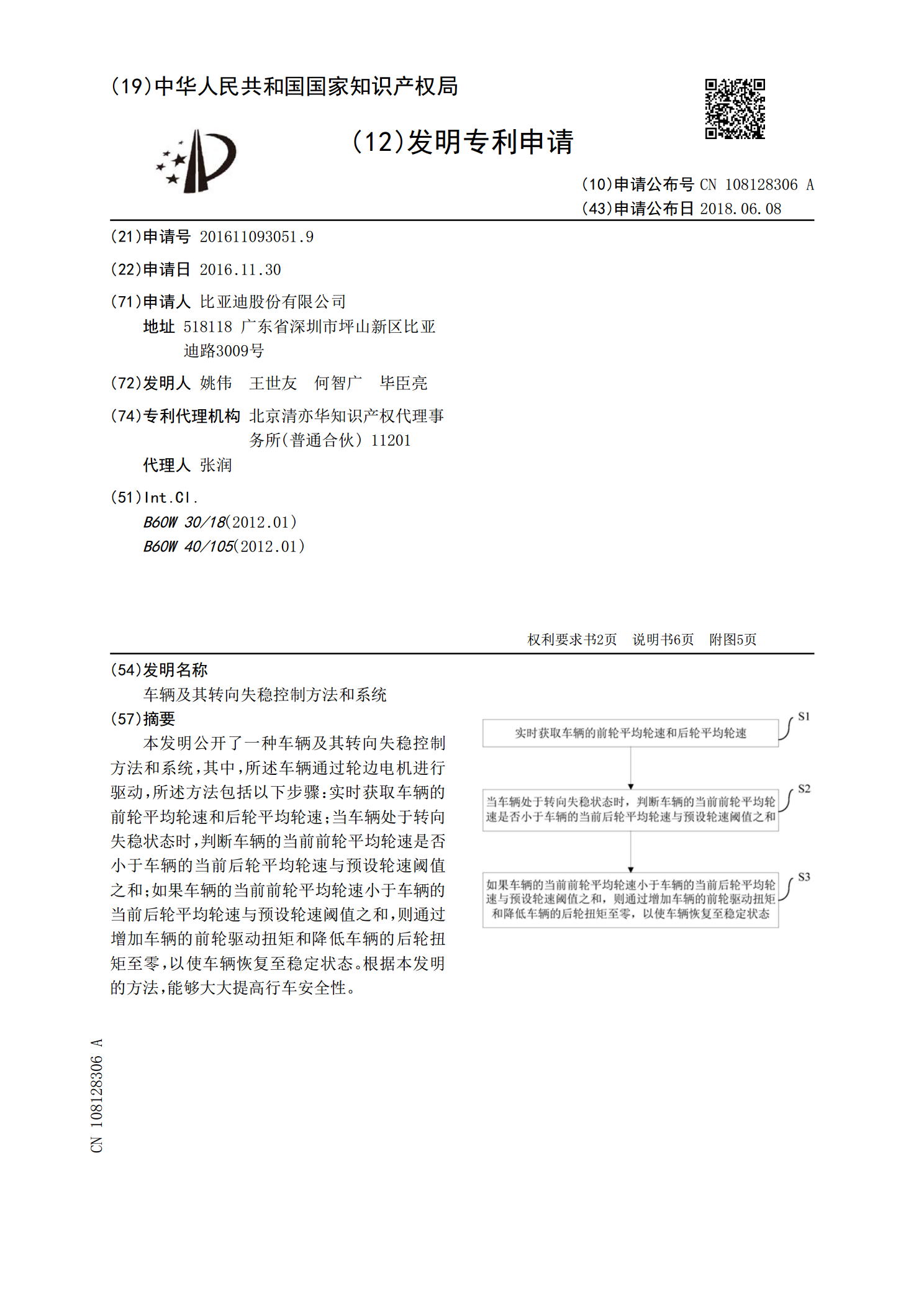
本发明公开了一种车辆及其转向失稳控制方法和系统,其中,所述车辆通过轮边电机进行驱动,所述方法包括以下步骤:实时获取车辆的前轮平均轮速和后轮平均轮速;当车辆处于转向失稳状态时,判断车辆的当前前轮平均轮速是否小于车辆的当前后轮平均轮速与预设轮速阈值之和;如果车辆的当前前轮平均轮速小于车辆的当前后轮平均轮速与预设轮速阈值之和,则通过增加车辆的前轮驱动扭矩和降低车辆的后轮扭矩至零,以使车辆恢复至稳定状态。根据本发明的方法,能够大大提高行车安全性。