
飞机防滑刹车控制系统及控制方法.pdf

一吃****春艳


1/9
2/9
3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

飞机防滑刹车控制系统及控制方法.pdf
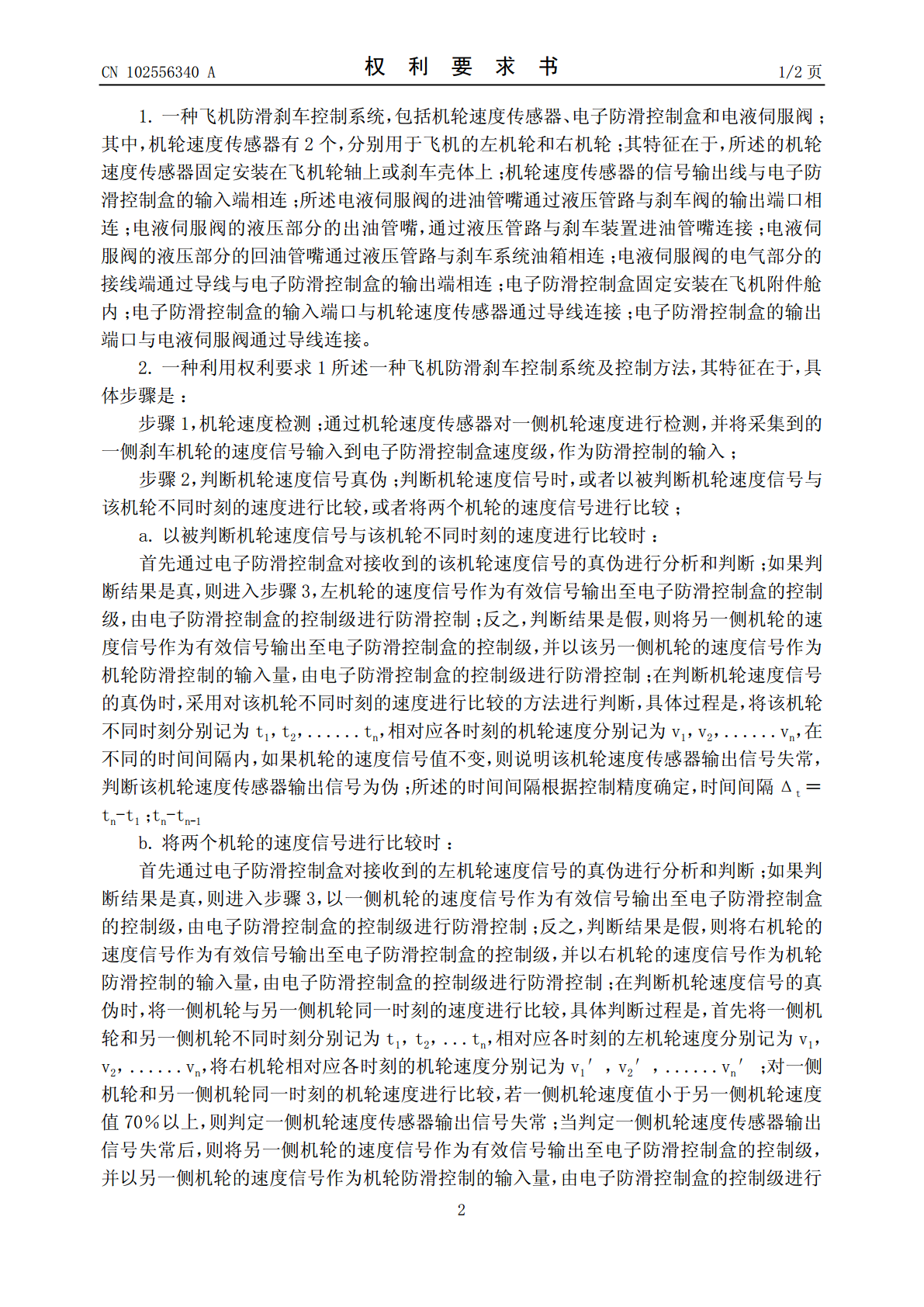
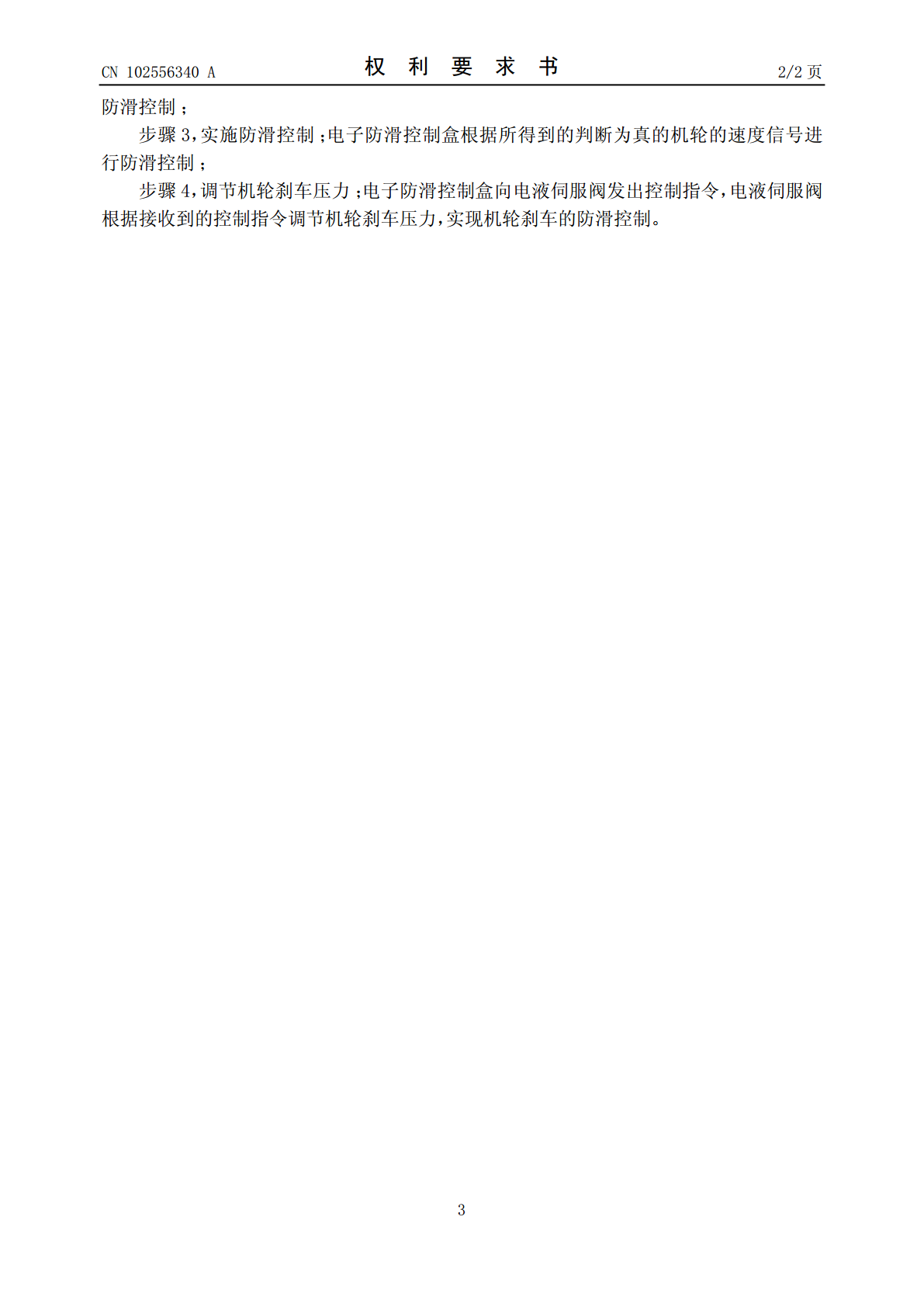
一种飞机防滑刹车控制系统及控制方法。所述飞机防滑刹车控制系统中2个机轮速度传感器分别用于飞机的左机轮和右机轮。机轮速度传感器与电子防滑控制盒的输入端相连。电液伺服阀分别与刹车阀、刹车装置、电液伺服阀和电子防滑控制盒连接。电子防滑控制盒的输入端口与机轮速度传感器连接。电子防滑控制盒的输出端口与电液伺服阀连接。本发明中,电子防滑控制盒通过对被判断机轮速度信号与该机轮不同时刻的速度进行比较,或者将两个机轮的速度信号进行比较,对接收到的机轮速度信号的真伪进行判断,从而根据所得到的判断为真的机轮的速度信号进行防滑控
飞机刹车防滑控制方法及飞机刹车系统.pdf
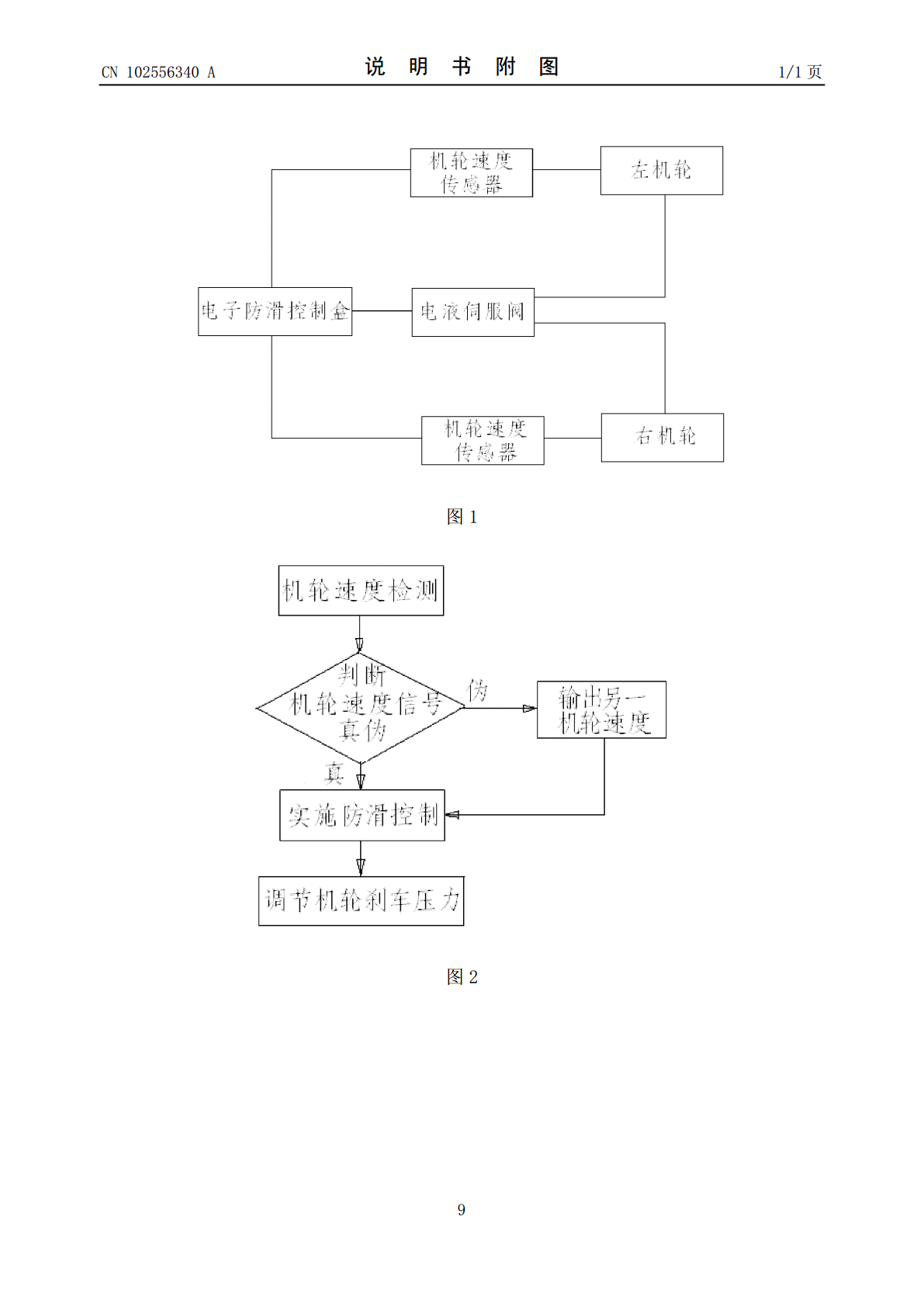
一种飞机刹车防滑控制方法及飞机刹车系统。采用主动控制思想,将刹车时飞机速度联系起来,考虑高速飞机升力影响,使实际刹车压力随飞机减速逐步增大,避免了刹车开始地面结合系数小出现打滑甚至可能刹爆轮胎的危险。同时,进一步减少对驾驶员刹车技能要求,有利于克服人的因素保障高速段使用安全。刹车压力随飞机减速逐步增大,既解决高速段刹车存在的潜在事故危险,又减少防滑控制运行频次,提高了刹车效率。本发明所述的飞机防滑刹车控制方法和系统,既适用于新机研制,也适用于现役机型的改装。
一种飞机防滑刹车控制系统及控制方法.pdf
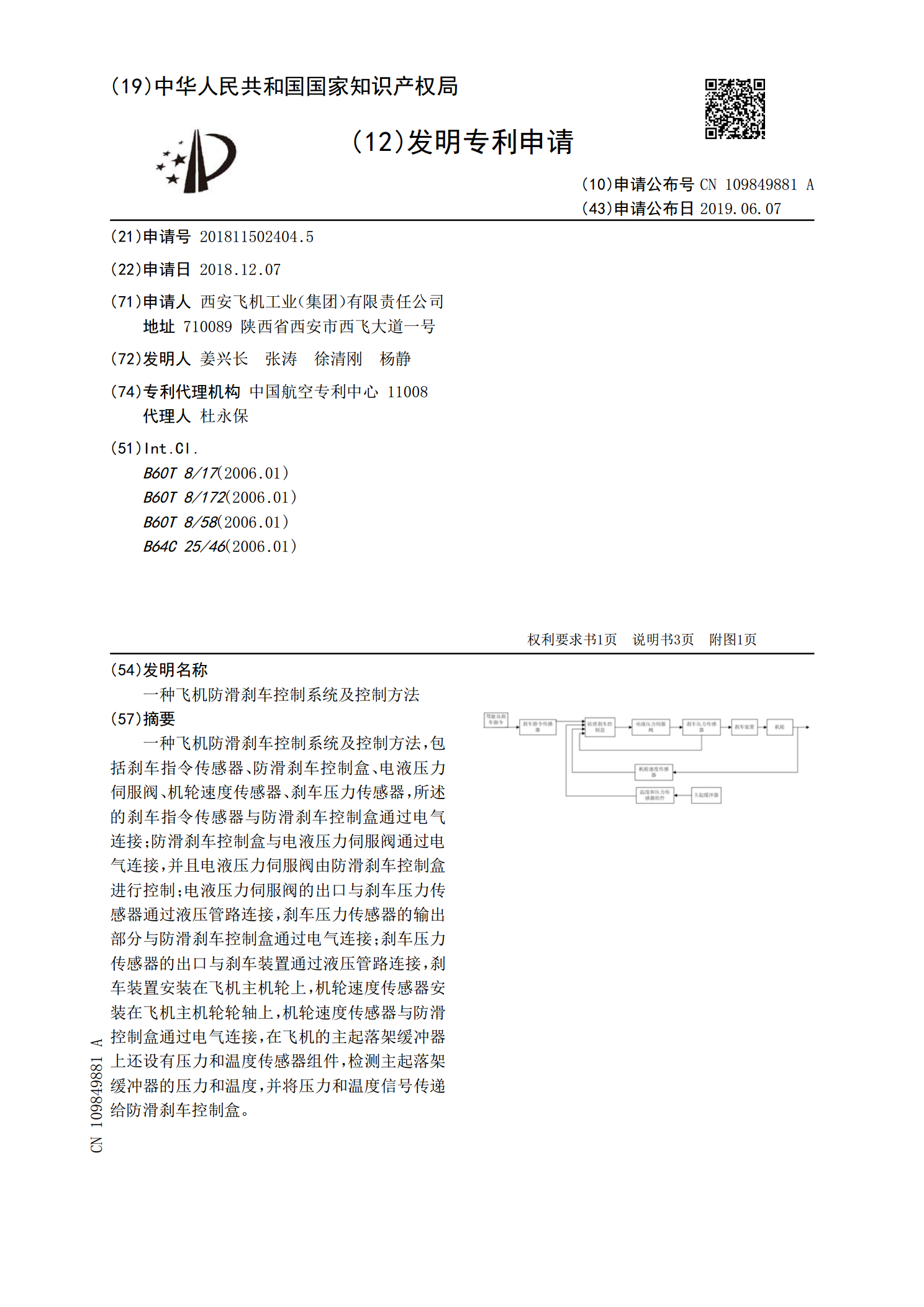
一种飞机防滑刹车控制系统及控制方法,包括刹车指令传感器、防滑刹车控制盒、电液压力伺服阀、机轮速度传感器、刹车压力传感器,所述的刹车指令传感器与防滑刹车控制盒通过电气连接;防滑刹车控制盒与电液压力伺服阀通过电气连接,并且电液压力伺服阀由防滑刹车控制盒进行控制;电液压力伺服阀的出口与刹车压力传感器通过液压管路连接,刹车压力传感器的输出部分与防滑刹车控制盒通过电气连接;刹车压力传感器的出口与刹车装置通过液压管路连接,刹车装置安装在飞机主机轮上,机轮速度传感器安装在飞机主机轮轮轴上,机轮速度传感器与防滑控制盒通过
一种飞机防滑刹车控制系统.pdf
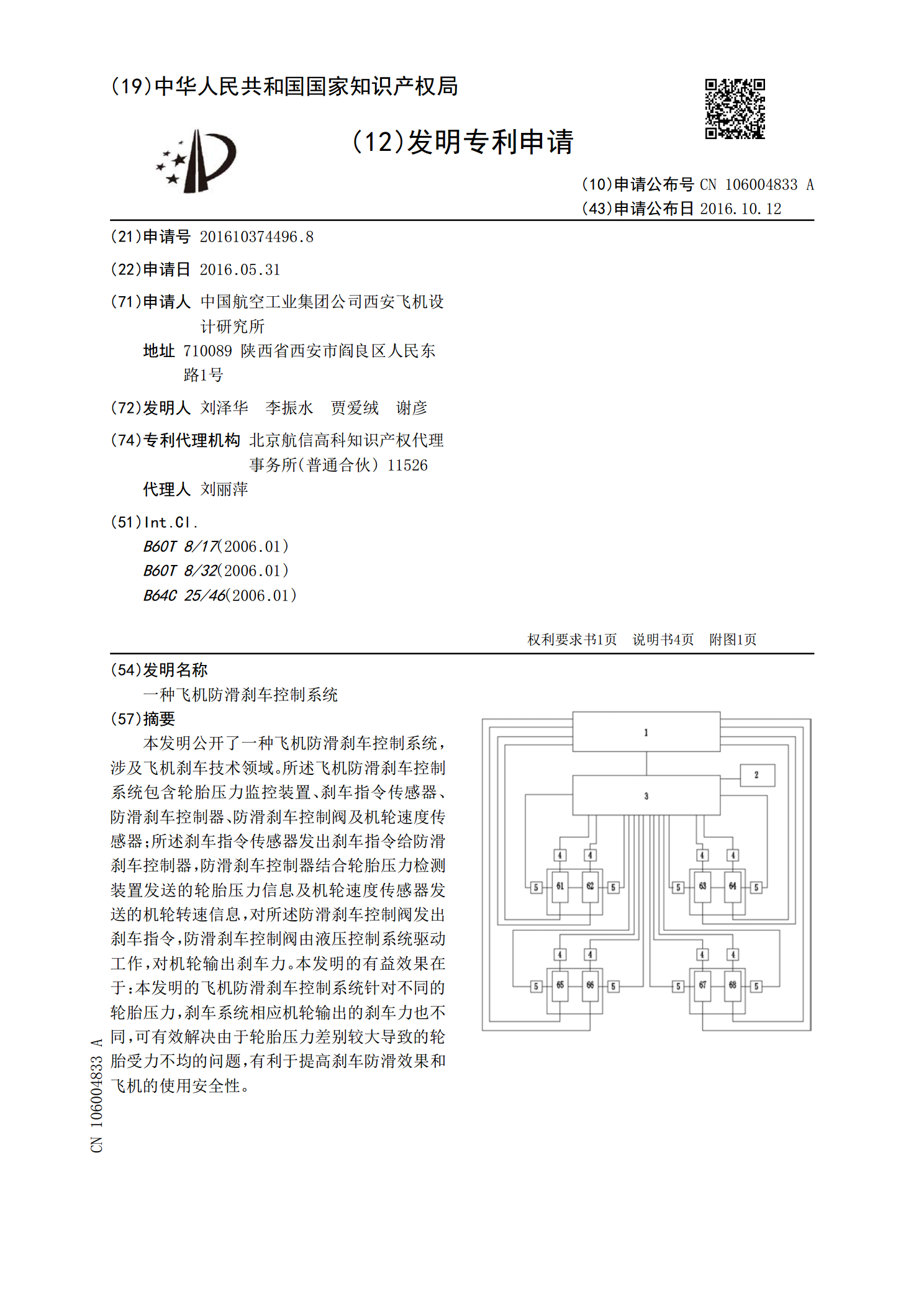
本发明公开了一种飞机防滑刹车控制系统,涉及飞机刹车技术领域。所述飞机防滑刹车控制系统包含轮胎压力监控装置、刹车指令传感器、防滑刹车控制器、防滑刹车控制阀及机轮速度传感器;所述刹车指令传感器发出刹车指令给防滑刹车控制器,防滑刹车控制器结合轮胎压力检测装置发送的轮胎压力信息及机轮速度传感器发送的机轮转速信息,对所述防滑刹车控制阀发出刹车指令,防滑刹车控制阀由液压控制系统驱动工作,对机轮输出刹车力。本发明的有益效果在于:本发明的飞机防滑刹车控制系统针对不同的轮胎压力,刹车系统相应机轮输出的刹车力也不同,可有效解
一种飞机防滑刹车控制系统.pdf
本发明公开了一种飞机防滑刹车控制系统,左刹车指令传感器、右刹车指令传感器、左轮速传感器、右轮速传感器、座舱操作信息端口、C/C信息存储单元均与防滑刹车控制器连接,防滑刹车控制器分别通过左电液压力伺服阀和右电液压力伺服阀控制左主机论和右主机轮。该飞机防滑刹车控制系统能够有效解决炭盘力矩冲峰,自动调节刹车压力,有力保障刹车过程平稳安全。