
一种双电机耦合驱动履带车辆转向系统.pdf

努力****甲寅

1/8

2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双电机耦合驱动履带车辆转向系统.pdf
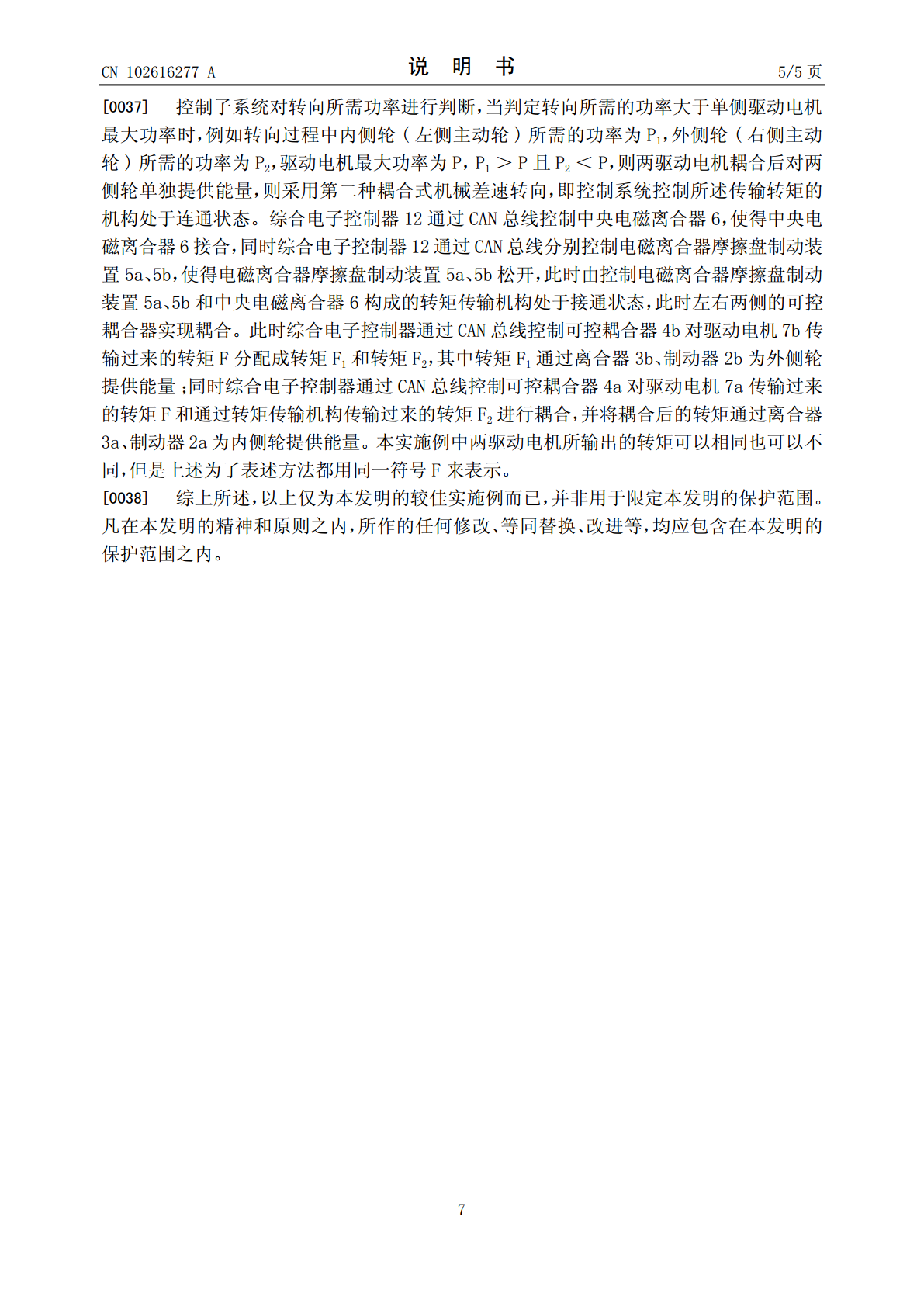
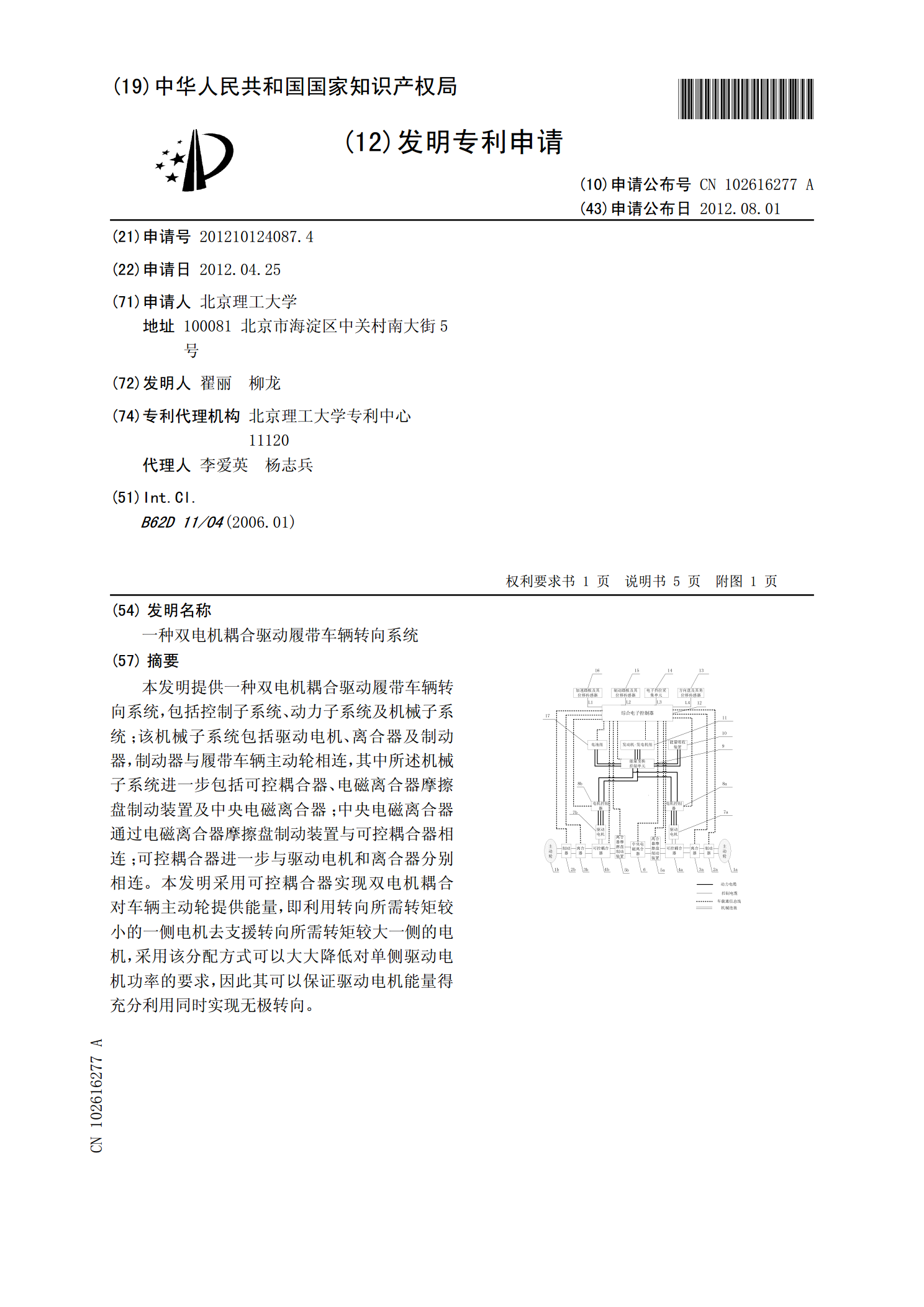
本发明提供一种双电机耦合驱动履带车辆转向系统,包括控制子系统、动力子系统及机械子系统;该机械子系统包括驱动电机、离合器及制动器,制动器与履带车辆主动轮相连,其中所述机械子系统进一步包括可控耦合器、电磁离合器摩擦盘制动装置及中央电磁离合器;中央电磁离合器通过电磁离合器摩擦盘制动装置与可控耦合器相连;可控耦合器进一步与驱动电机和离合器分别相连。本发明采用可控耦合器实现双电机耦合对车辆主动轮提供能量,即利用转向所需转矩较小的一侧电机去支援转向所需转矩较大一侧的电机,采用该分配方式可以大大降低对单侧驱动电机功率的

一种电传动履带车辆双侧电机耦合驱动转向系统.pdf
本发明涉及一种电传动履带车辆双侧电机耦合驱动转向系统,用于双侧电机驱动履带车辆的转向行驶。转向系统包括机械系统和电气系统,其中电气系统又包括动力系统和控制系统。当转向所需功率小于单侧电机最大功率时,采用双侧电机独立驱动电子控制差速转向;当转向所需功率大于单侧电机最大功率时,采用双侧电机耦合驱动方式实现转向,这种情况下外侧电机提供的转矩不能满足转向所需转矩,此时内侧电机通过内侧行星齿轮耦合器,将动力依次传递给中央电磁离合器和外侧行星齿轮耦合器,通过外侧行星齿轮耦合器与来自外侧驱动电机的动力耦合,驱动外侧主动

一种电驱动履带车辆转向电机与单侧驱动电机耦合转向系统.pdf
本发明涉及一种电驱动履带车辆转向电机与单侧驱动电机耦合转向系统,用于双侧电机驱动履带车辆的转向行驶。转向系统包括机械系统和电气系统,其中电气系统又包括动力系统和控制系统。当转向所需功率小于单侧电机最大功率时,采用电子差速转向方式。当转向所需功率大于单侧驱动电机最大功率时,采用机械耦合实现转向。综合电子控制器通过CAN总线控制内侧电磁离合器的分离和外侧电磁离合器的结合,使得转向电机依次通过外侧电磁离合器和外侧行星耦合器,通过外侧行星耦合器与外侧驱动电机的动力进行耦合,驱动外侧主动轮,来满足转向电机功率需求。
一种双侧电机驱动履带车辆转向系统.pdf
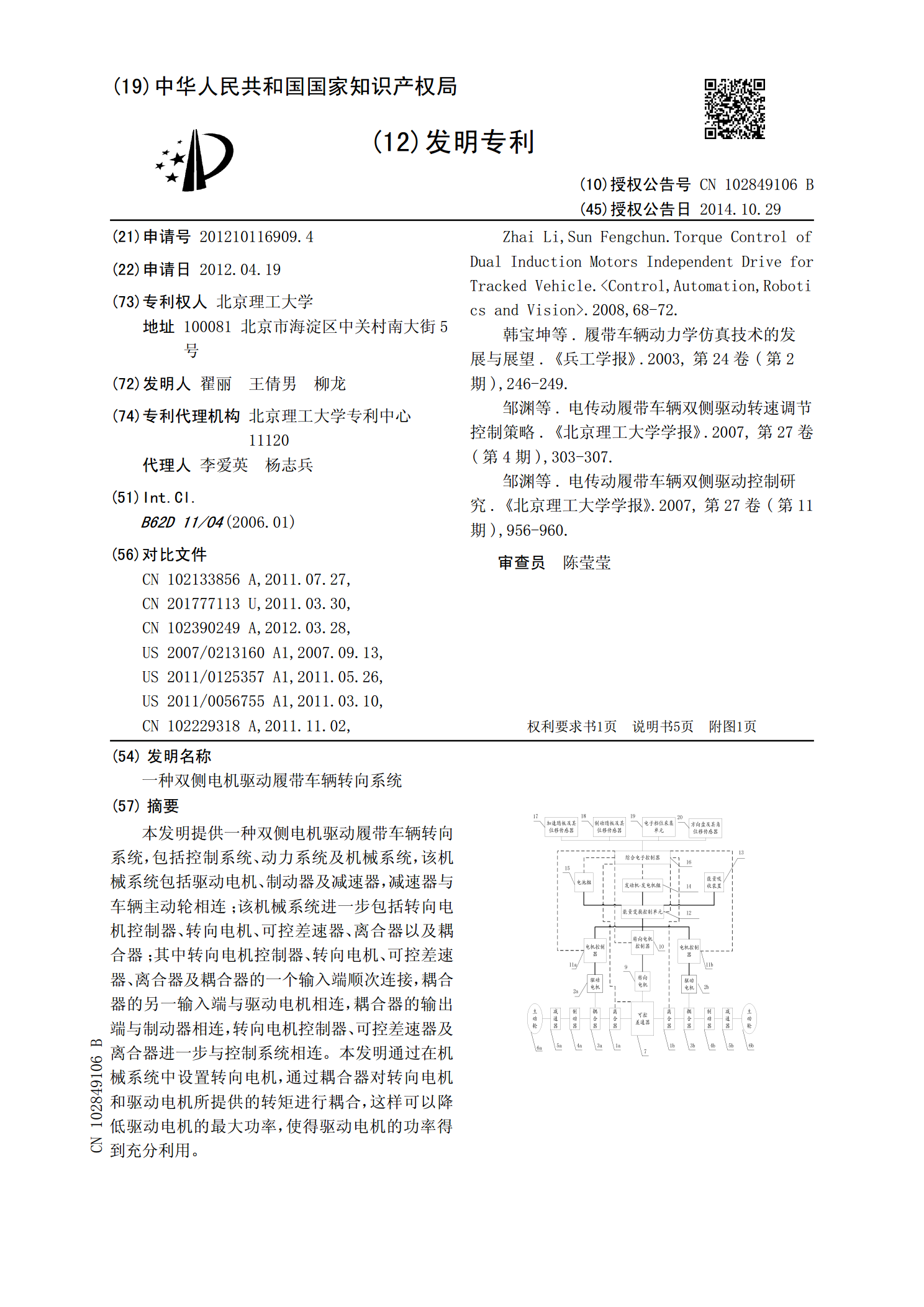
本发明提供一种双侧电机驱动履带车辆转向系统,包括控制系统、动力系统及机械系统,该机械系统包括驱动电机、制动器及减速器,减速器与车辆主动轮相连;该机械系统进一步包括转向电机控制器、转向电机、可控差速器、离合器以及耦合器;其中转向电机控制器、转向电机、可控差速器、离合器及耦合器的一个输入端顺次连接,耦合器的另一输入端与驱动电机相连,耦合器的输出端与制动器相连,转向电机控制器、可控差速器及离合器进一步与控制系统相连。本发明通过在机械系统中设置转向电机,通过耦合器对转向电机和驱动电机所提供的转矩进行耦合,这样可以
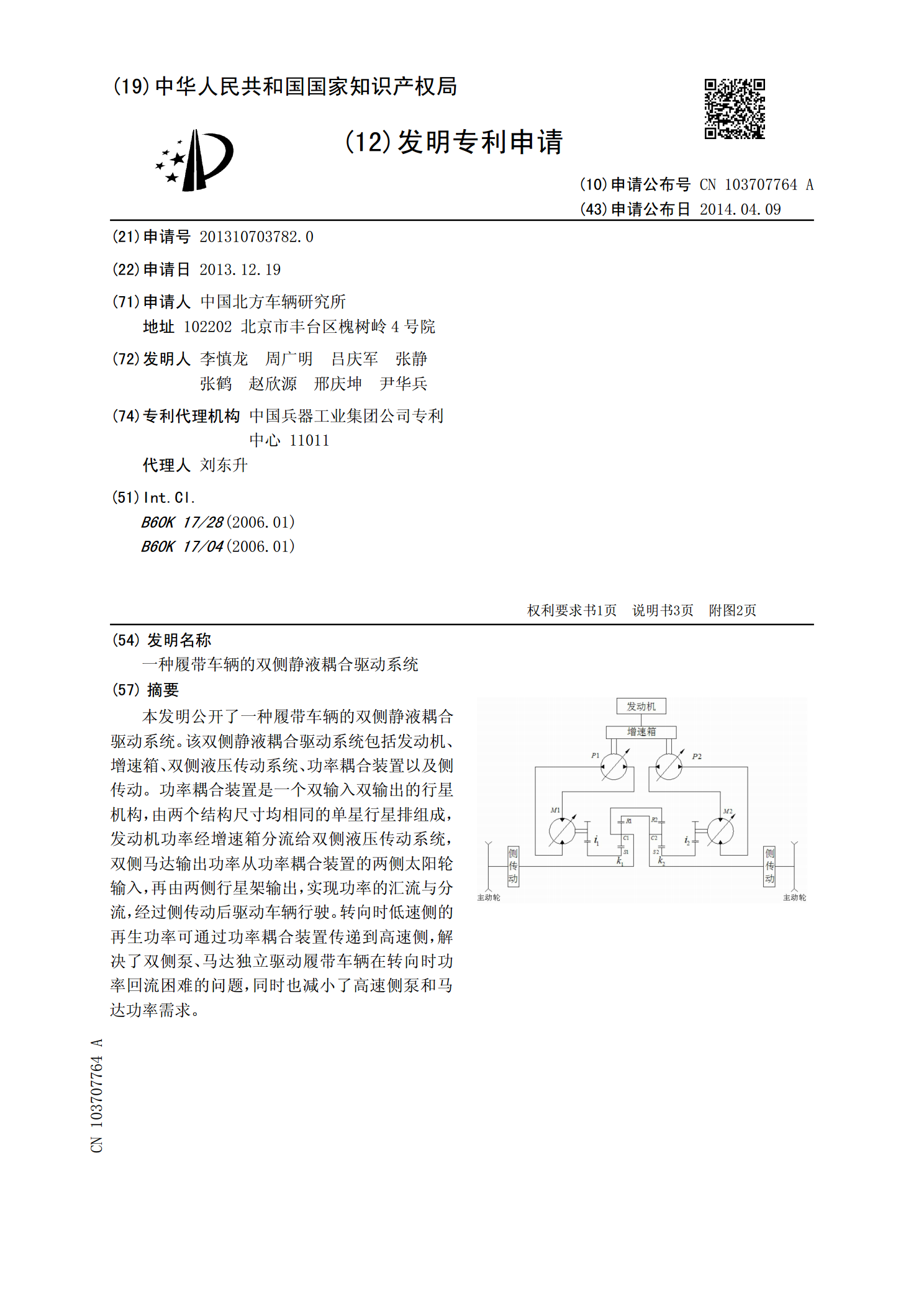
一种履带车辆的双侧静液耦合驱动系统.pdf
本发明公开了一种履带车辆的双侧静液耦合驱动系统。该双侧静液耦合驱动系统包括发动机、增速箱、双侧液压传动系统、功率耦合装置以及侧传动。功率耦合装置是一个双输入双输出的行星机构,由两个结构尺寸均相同的单星行星排组成,发动机功率经增速箱分流给双侧液压传动系统,双侧马达输出功率从功率耦合装置的两侧太阳轮输入,再由两侧行星架输出,实现功率的汇流与分流,经过侧传动后驱动车辆行驶。转向时低速侧的再生功率可通过功率耦合装置传递到高速侧,解决了双侧泵、马达独立驱动履带车辆在转向时功率回流困难的问题,同时也减小了高速侧泵和马