
具有仿生吸振和仿生粘附结构的爬壁机器人.pdf

一只****呀淑


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有仿生吸振和仿生粘附结构的爬壁机器人.pdf
本发明涉及到工程仿生学,以及机械设计和制造等学科领域,尤其是涉及一种利用仿生吸振和仿生粘附来实现爬壁功能的机器人设备。目的是为了解决爬壁机器人常见吸附方式的局限性以及减小爬壁过程中的震动,提供一种结构简单,易于加工,粘附和吸收震动效果都很好的具有仿生吸振和仿生粘附结构的爬壁机器人。一种具有仿生吸振和仿生粘附结构的爬壁机器人,具有前后底盘、驱动单元和执行单元,执行单元包括4个同步带轮、同步带和连接同步带轮的轴,上述前后底盘之间通过仿生吸振单元弹性连接,仿生吸振单元由弹簧和多孔弹性橡胶组成,且多孔弹性橡胶包裹

一种具有仿生吸振结构的微刺式爬壁机器人.pdf
本发明公开了一种具有仿生吸振结构的微刺式爬壁机器人,包括机体,及设于所述机体上的尾部,及设于所述机体两侧的转轮,所述转轮包括间隔设置的微刺片和隔片,所述微刺片包括微刺、柔性部件以及设于所述机体圆轴上的转盘,所述柔性部件将所述微刺连接于转盘的侧边缘上。本发明的爬壁机器人通过吸振单元来连接机器人机体与尾部,尾部在机器人爬行运动过程中起平衡作用;吸振单元是通过对生物机体刚柔混合特性的仿生设计,在类似脊椎的刚性材料结构的周围填充柔性材料,具有抗振和吸振功能;机器人微刺片、隔片、机体、尾部都采用抗摔材料制造,增加了
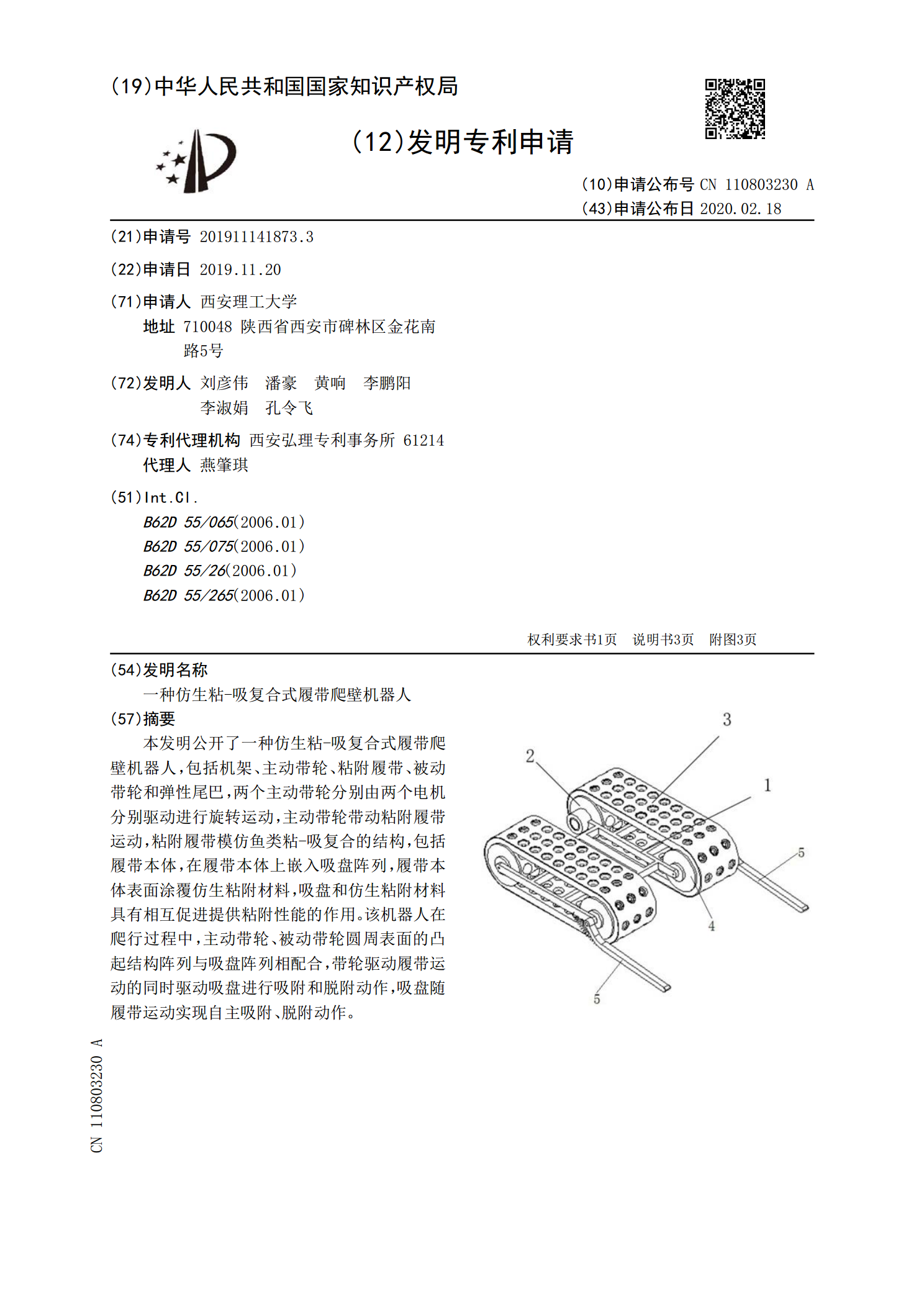
一种仿生粘-吸复合式履带爬壁机器人.pdf
本发明公开了一种仿生粘‑吸复合式履带爬壁机器人,包括机架、主动带轮、粘附履带、被动带轮和弹性尾巴,两个主动带轮分别由两个电机分别驱动进行旋转运动,主动带轮带动粘附履带运动,粘附履带模仿鱼类粘‑吸复合的结构,包括履带本体,在履带本体上嵌入吸盘阵列,履带本体表面涂覆仿生粘附材料,吸盘和仿生粘附材料具有相互促进提供粘附性能的作用。该机器人在爬行过程中,主动带轮、被动带轮圆周表面的凸起结构阵列与吸盘阵列相配合,带轮驱动履带运动的同时驱动吸盘进行吸附和脱附动作,吸盘随履带运动实现自主吸附、脱附动作。

仿生爬壁机器人设计与实现的开题报告.docx
仿生爬壁机器人设计与实现的开题报告题目:仿生爬壁机器人设计与实现一、研究背景与意义随着人们生活水平的提高,对日常生活中各个方面的要求也越来越高。在建筑维修、火险灾救和自动巡检等领域,经常需要高空、狭小或人类难以到达的地方进行检测和维护。而传统的人为施工不但危险,还耗时费力,这时候机器人的普及和应用显得极其重要。而在这些极易发生危险的环境中,仿生爬壁机器人被广泛地研究和应用,并赋予了极大的机遇和挑战。仿生爬壁机器人是模拟自然界中爬行动物的生物形态和行为,并将其应用于爬墙机器人的设计中。与传统爬行机器人相比,
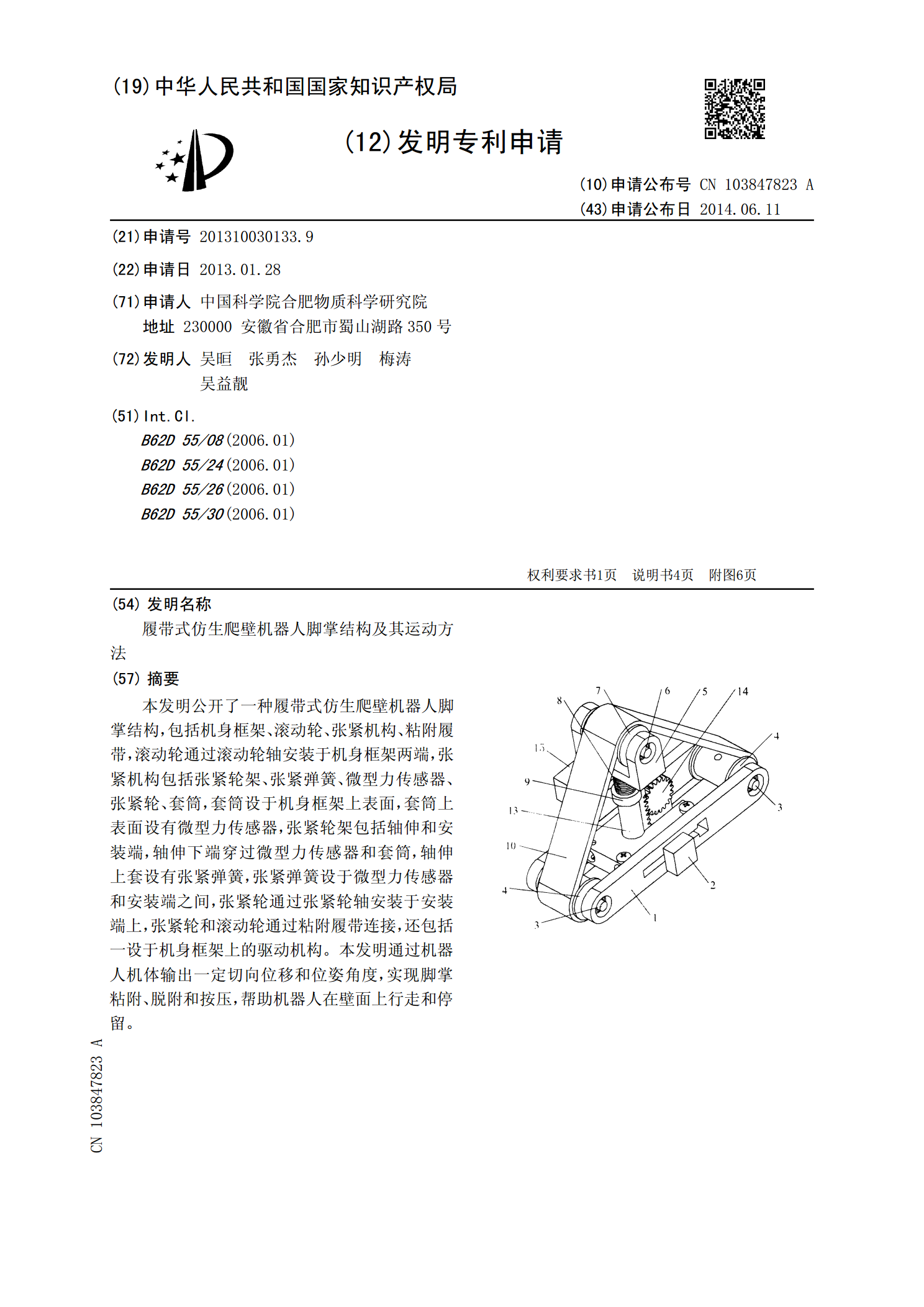
履带式仿生爬壁机器人脚掌结构及其运动方法.pdf
本发明公开了一种履带式仿生爬壁机器人脚掌结构,包括机身框架、滚动轮、张紧机构、粘附履带,滚动轮通过滚动轮轴安装于机身框架两端,张紧机构包括张紧轮架、张紧弹簧、微型力传感器、张紧轮、套筒,套筒设于机身框架上表面,套筒上表面设有微型力传感器,张紧轮架包括轴伸和安装端,轴伸下端穿过微型力传感器和套筒,轴伸上套设有张紧弹簧,张紧弹簧设于微型力传感器和安装端之间,张紧轮通过张紧轮轴安装于安装端上,张紧轮和滚动轮通过粘附履带连接,还包括一设于机身框架上的驱动机构。本发明通过机器人机体输出一定切向位移和位姿角度,实现脚