
履带式仿生爬壁机器人脚掌结构及其运动方法.pdf

子璇****君淑

1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
履带式仿生爬壁机器人脚掌结构及其运动方法.pdf
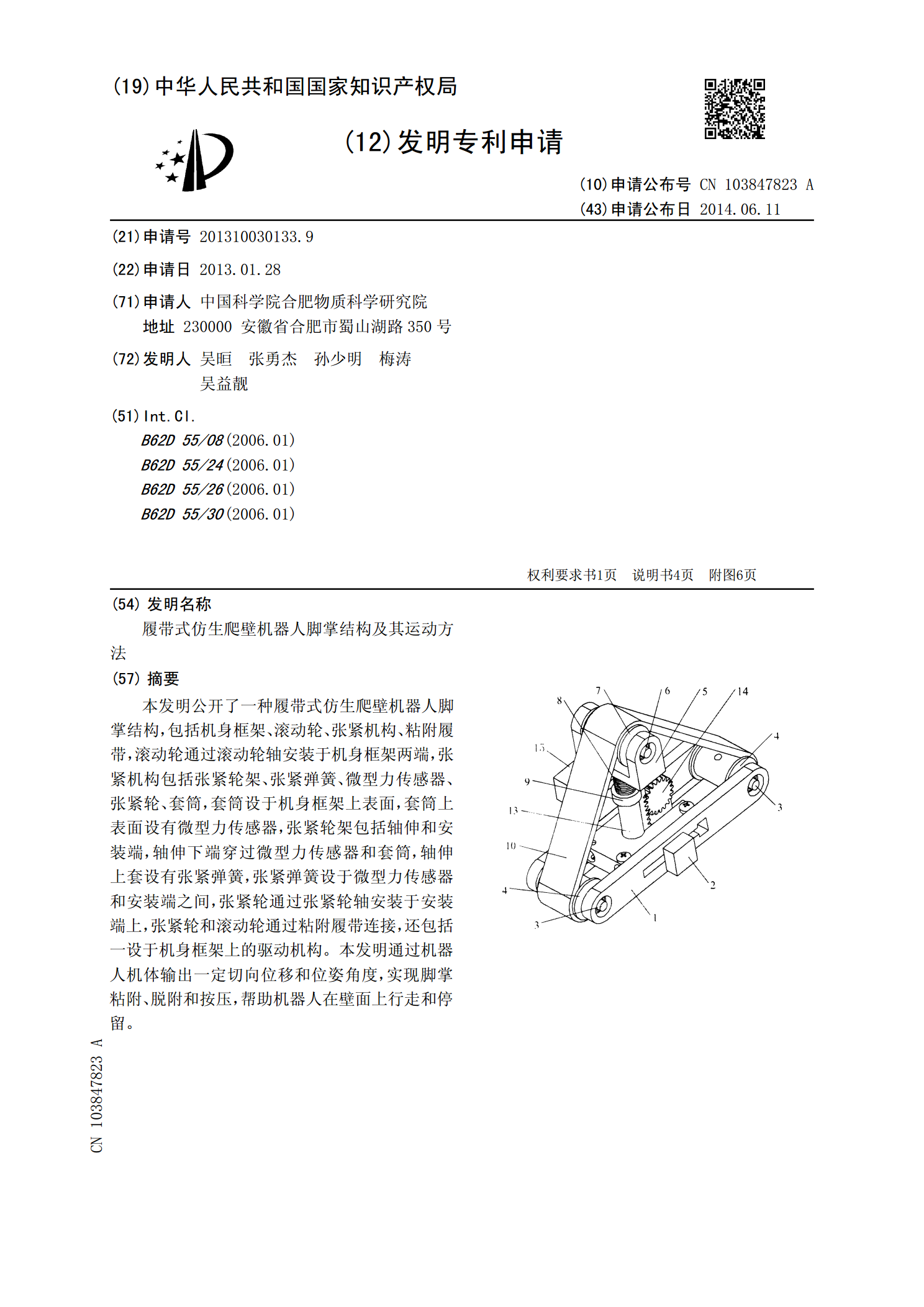
本发明公开了一种履带式仿生爬壁机器人脚掌结构,包括机身框架、滚动轮、张紧机构、粘附履带,滚动轮通过滚动轮轴安装于机身框架两端,张紧机构包括张紧轮架、张紧弹簧、微型力传感器、张紧轮、套筒,套筒设于机身框架上表面,套筒上表面设有微型力传感器,张紧轮架包括轴伸和安装端,轴伸下端穿过微型力传感器和套筒,轴伸上套设有张紧弹簧,张紧弹簧设于微型力传感器和安装端之间,张紧轮通过张紧轮轴安装于安装端上,张紧轮和滚动轮通过粘附履带连接,还包括一设于机身框架上的驱动机构。本发明通过机器人机体输出一定切向位移和位姿角度,实现脚

具有仿生吸振和仿生粘附结构的爬壁机器人.pdf
本发明涉及到工程仿生学,以及机械设计和制造等学科领域,尤其是涉及一种利用仿生吸振和仿生粘附来实现爬壁功能的机器人设备。目的是为了解决爬壁机器人常见吸附方式的局限性以及减小爬壁过程中的震动,提供一种结构简单,易于加工,粘附和吸收震动效果都很好的具有仿生吸振和仿生粘附结构的爬壁机器人。一种具有仿生吸振和仿生粘附结构的爬壁机器人,具有前后底盘、驱动单元和执行单元,执行单元包括4个同步带轮、同步带和连接同步带轮的轴,上述前后底盘之间通过仿生吸振单元弹性连接,仿生吸振单元由弹簧和多孔弹性橡胶组成,且多孔弹性橡胶包裹
钩爪式六足爬壁机器人及其运动方法.pdf
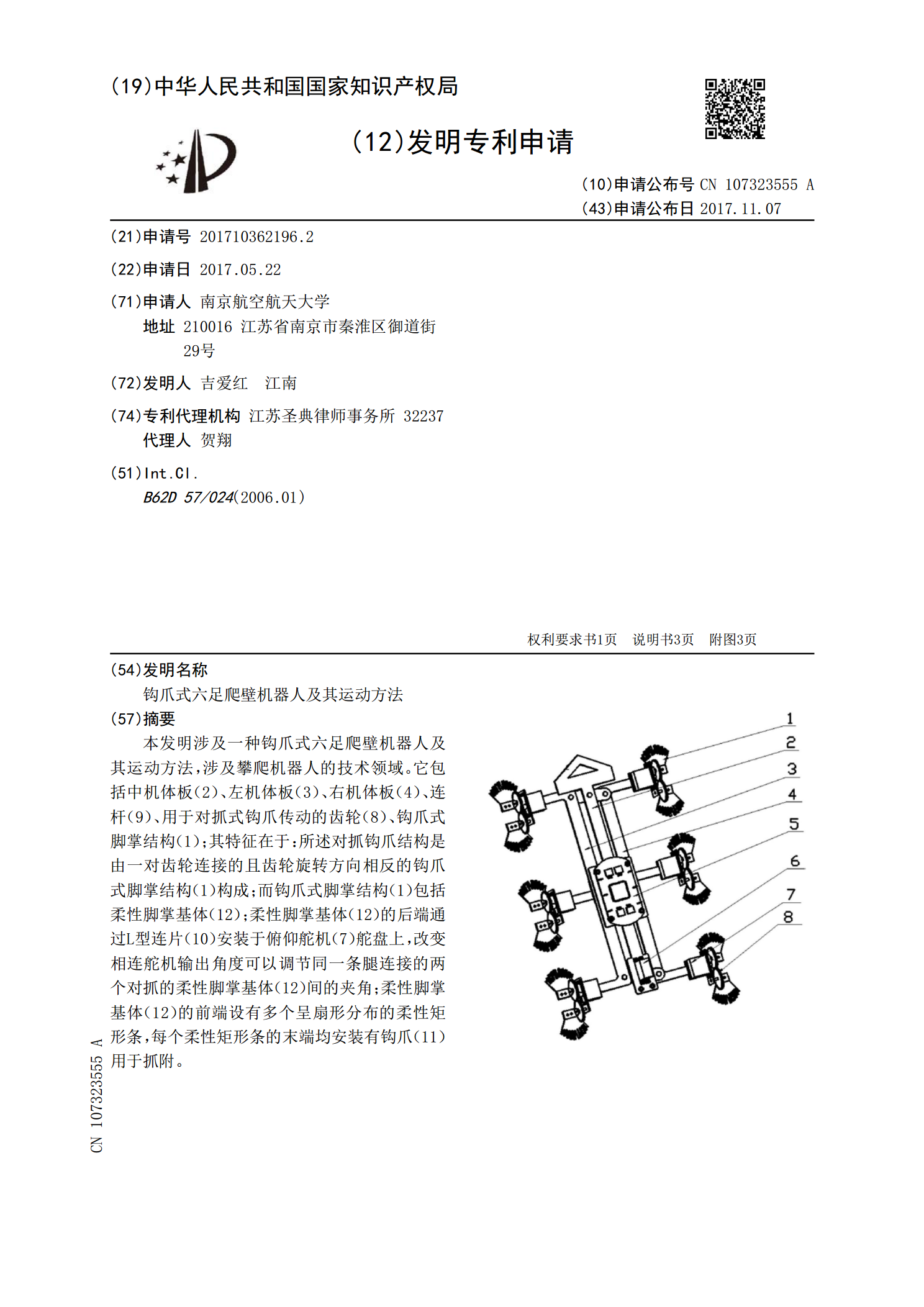
本发明涉及一种钩爪式六足爬壁机器人及其运动方法,涉及攀爬机器人的技术领域。它包括中机体板(2)、左机体板(3)、右机体板(4)、连杆(9)、用于对抓式钩爪传动的齿轮(8)、钩爪式脚掌结构(1);其特征在于:所述对抓钩爪结构是由一对齿轮连接的且齿轮旋转方向相反的钩爪式脚掌结构(1)构成;而钩爪式脚掌结构(1)包括柔性脚掌基体(12);柔性脚掌基体(12)的后端通过L型连片(10)安装于俯仰舵机(7)舵盘上,改变相连舵机输出角度可以调节同一条腿连接的两个对抓的柔性脚掌基体(12)间的夹角;柔性脚掌基体(12)
爬壁机器人运动控制方法.pdf
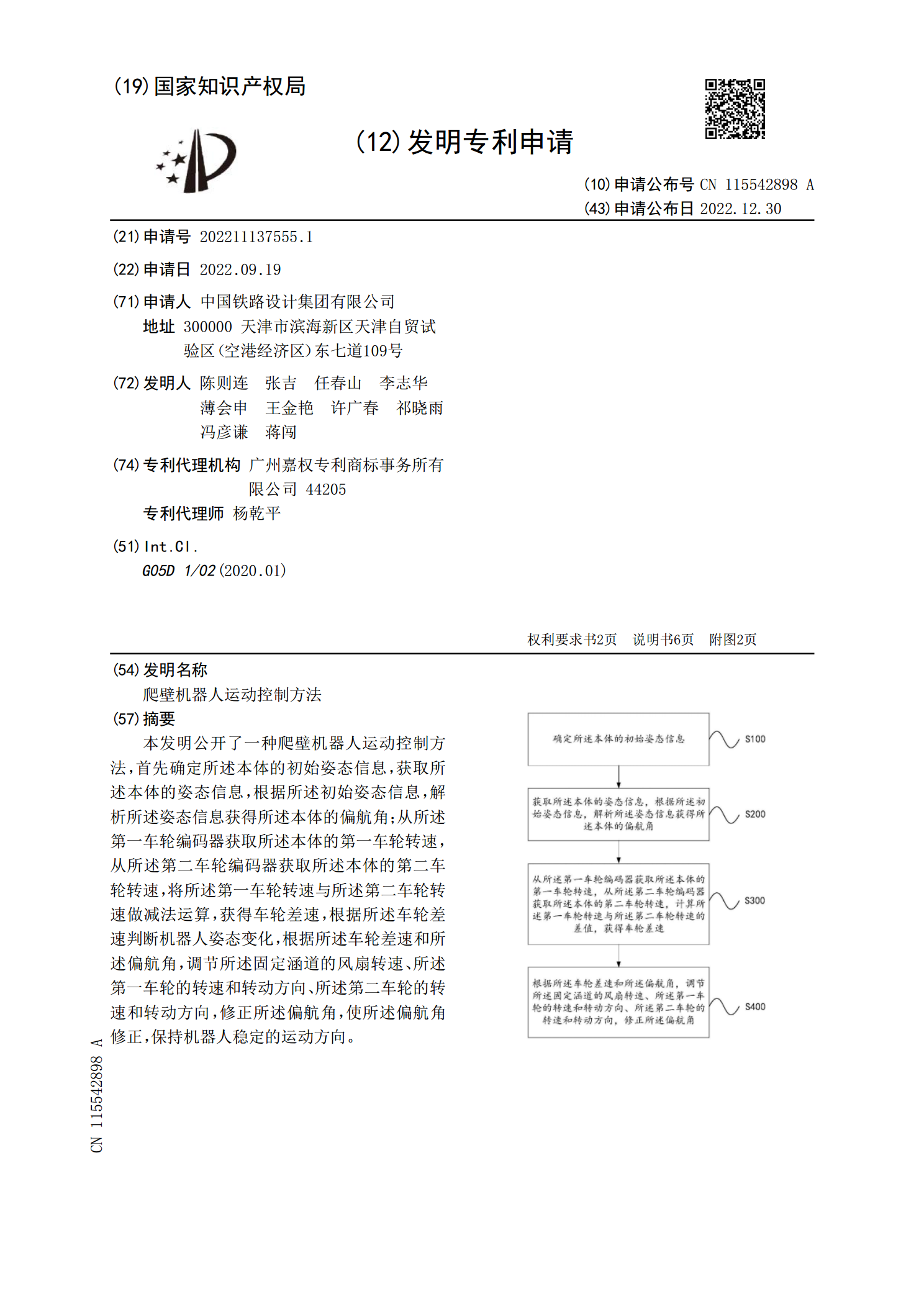
本发明公开了一种爬壁机器人运动控制方法,首先确定所述本体的初始姿态信息,获取所述本体的姿态信息,根据所述初始姿态信息,解析所述姿态信息获得所述本体的偏航角;从所述第一车轮编码器获取所述本体的第一车轮转速,从所述第二车轮编码器获取所述本体的第二车轮转速,将所述第一车轮转速与所述第二车轮转速做减法运算,获得车轮差速,根据所述车轮差速判断机器人姿态变化,根据所述车轮差速和所述偏航角,调节所述固定涵道的风扇转速、所述第一车轮的转速和转动方向、所述第二车轮的转速和转动方向,修正所述偏航角,使所述偏航角修正,保持机器

仿生爬壁机器人设计与实现的开题报告.docx
仿生爬壁机器人设计与实现的开题报告题目:仿生爬壁机器人设计与实现一、研究背景与意义随着人们生活水平的提高,对日常生活中各个方面的要求也越来越高。在建筑维修、火险灾救和自动巡检等领域,经常需要高空、狭小或人类难以到达的地方进行检测和维护。而传统的人为施工不但危险,还耗时费力,这时候机器人的普及和应用显得极其重要。而在这些极易发生危险的环境中,仿生爬壁机器人被广泛地研究和应用,并赋予了极大的机遇和挑战。仿生爬壁机器人是模拟自然界中爬行动物的生物形态和行为,并将其应用于爬墙机器人的设计中。与传统爬行机器人相比,