
一种具有仿生吸振结构的微刺式爬壁机器人.pdf

志信****pp

1/7
2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种具有仿生吸振结构的微刺式爬壁机器人.pdf
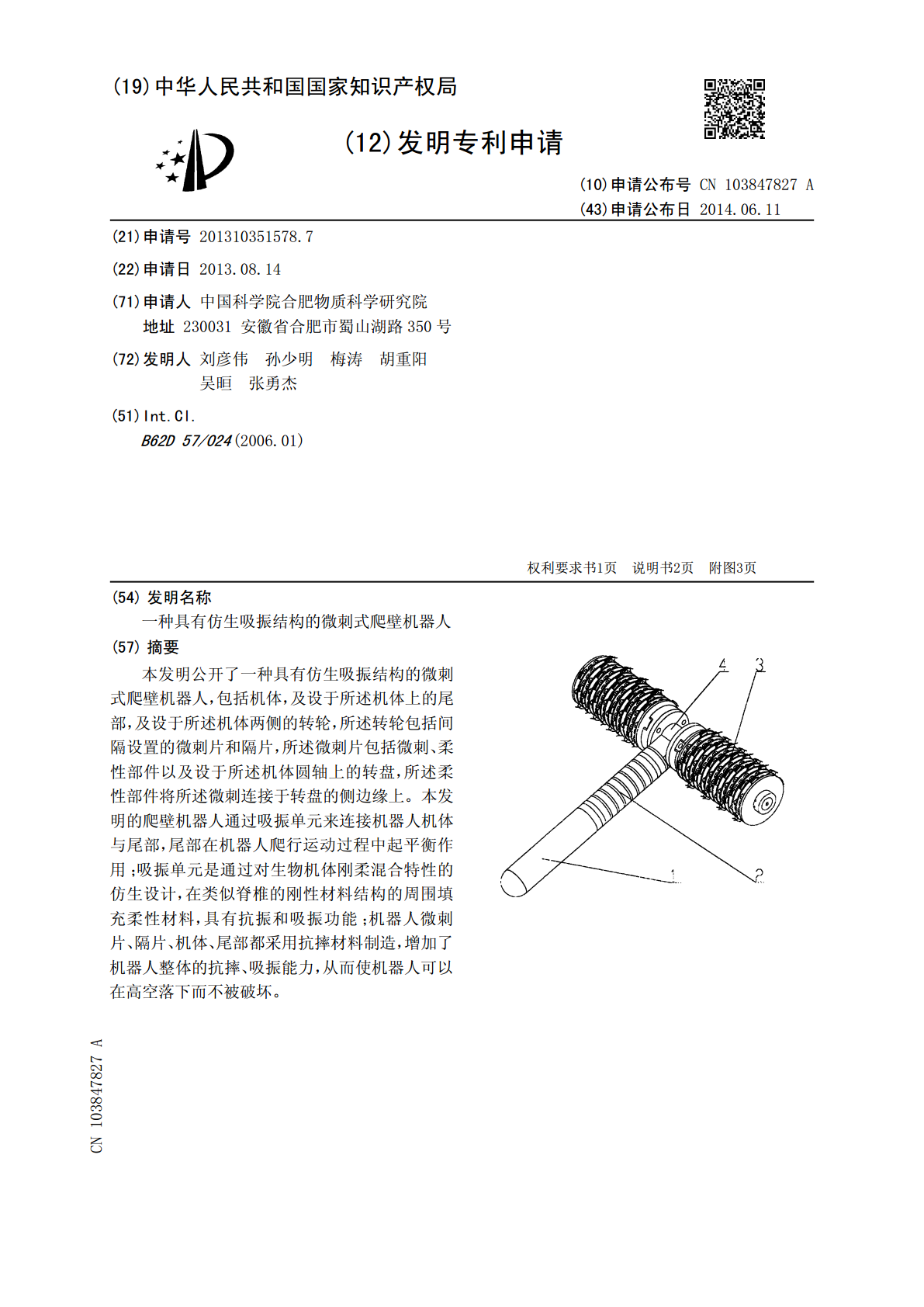
本发明公开了一种具有仿生吸振结构的微刺式爬壁机器人,包括机体,及设于所述机体上的尾部,及设于所述机体两侧的转轮,所述转轮包括间隔设置的微刺片和隔片,所述微刺片包括微刺、柔性部件以及设于所述机体圆轴上的转盘,所述柔性部件将所述微刺连接于转盘的侧边缘上。本发明的爬壁机器人通过吸振单元来连接机器人机体与尾部,尾部在机器人爬行运动过程中起平衡作用;吸振单元是通过对生物机体刚柔混合特性的仿生设计,在类似脊椎的刚性材料结构的周围填充柔性材料,具有抗振和吸振功能;机器人微刺片、隔片、机体、尾部都采用抗摔材料制造,增加了

具有仿生吸振和仿生粘附结构的爬壁机器人.pdf
本发明涉及到工程仿生学,以及机械设计和制造等学科领域,尤其是涉及一种利用仿生吸振和仿生粘附来实现爬壁功能的机器人设备。目的是为了解决爬壁机器人常见吸附方式的局限性以及减小爬壁过程中的震动,提供一种结构简单,易于加工,粘附和吸收震动效果都很好的具有仿生吸振和仿生粘附结构的爬壁机器人。一种具有仿生吸振和仿生粘附结构的爬壁机器人,具有前后底盘、驱动单元和执行单元,执行单元包括4个同步带轮、同步带和连接同步带轮的轴,上述前后底盘之间通过仿生吸振单元弹性连接,仿生吸振单元由弹簧和多孔弹性橡胶组成,且多孔弹性橡胶包裹

仿生爪刺式双足爬壁机器人设计与分析.docx
仿生爪刺式双足爬壁机器人设计与分析本文将重点介绍一种仿生爪刺式双足爬壁机器人的设计与分析。该机器人的主要功能是在各种墙面上自由爬行,以便在危险或无法人力到达的区域进行探测和救援等工作。本文将从以下几个方面对该机器人进行设计与分析:机器人结构设计、动力系统设计、传感器系统设计、控制系统设计与实现以及机器人实验效果测试。一、机器人结构设计本文提出的仿生爪刺式双足爬壁机器人采用了人类手臂及腿部骨骼结构的设计方法,将机器人设计成一种“双臂双腿”的结构,使得机器人具备类人的运动能力,能够在墙面上自由爬行。机器人主体

仿生爪刺式双足爬壁机器人设计与分析.docx
仿生爪刺式双足爬壁机器人设计与分析Title:DesignandAnalysisofaBiomimeticSpikedDual-LeggedWall-ClimbingRobotAbstract:Wall-climbingrobotshavegainedsignificantattentioninthefieldofroboticsduetotheirpotentialapplicationsinvariousindustriessuchasconstruction,inspection,andmainte

仿生爪刺式双足爬壁机器人设计与分析.pptx
仿生爪刺式双足爬壁机器人设计与分析目录添加章节标题仿生爪刺式双足爬壁机器人的设计理念仿生学的应用爪刺式结构的优势双足行走的稳定性爬壁机器人的适用场景仿生爪刺式双足爬壁机器人的结构设计机械结构设计驱动系统设计传感器系统设计电源系统设计仿生爪刺式双足爬壁机器人的运动性能分析运动学分析动力学分析稳定性分析效率与能耗分析仿生爪刺式双足爬壁机器人的控制策略与算法控制策略设计导航算法实现避障算法实现自适应控制算法实现仿生爪刺式双足爬壁机器人的实验验证与性能评估实验环境搭建实验过程与结果记录性能评估标准与结果分析改进方