
具有传感转向装置的电动汽车及利用它的转向控制方法.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有传感转向装置的电动汽车及利用它的转向控制方法.pdf
本发明的电动汽车具有由转向角传感器(61)和油门传感器(62)及刹车传感器(63)检测出车辆(V)的转向状态,以此为基础的驱动ECU(30)控制左右前轮的车轮驱动装置1,维持转弯稳定性,同时由制动ECU(40)控制前轮/后轮的车轮制动装置,进一步提高转弯稳定性,而且所述驱动ECU(30)和所述制动ECU(40)作为相互间收发信息的备份(BackUp)来起作用,从而进一步加强故障自趋安全(Fail-Safe),尤其不需要反应于转向方向盘(50)的传动装置和转向机构等,可节省MDPS或HPS或EHPS之类的转

转向控制装置及转向控制方法.pdf
本发明根据一实施例提供一种转向控制装置,包含:一检测单元,配置以检测被定位在一前轮中的一主动齿轮的角度、一柱转矩及一电动机电流;一频率推算单元,配置以基于所述主动齿轮的角度、所述柱转矩或所述电动机电流中的至少一个来推算通过交通工具行驶在道路而产生的一道路表面频率;一齿条力推算单元,配置以基于所述主动齿轮的角度、所述柱转矩或所述电动机电流中的至少一个来推算一齿条力;及一控制单元,配置以基于所述道路表面频率来提取被包含在所述齿条力中的一道路表面信息,以及被配置用以基于所述道路表面信息及所述齿条力而控制一转向装
转向控制方法及转向控制装置.pdf
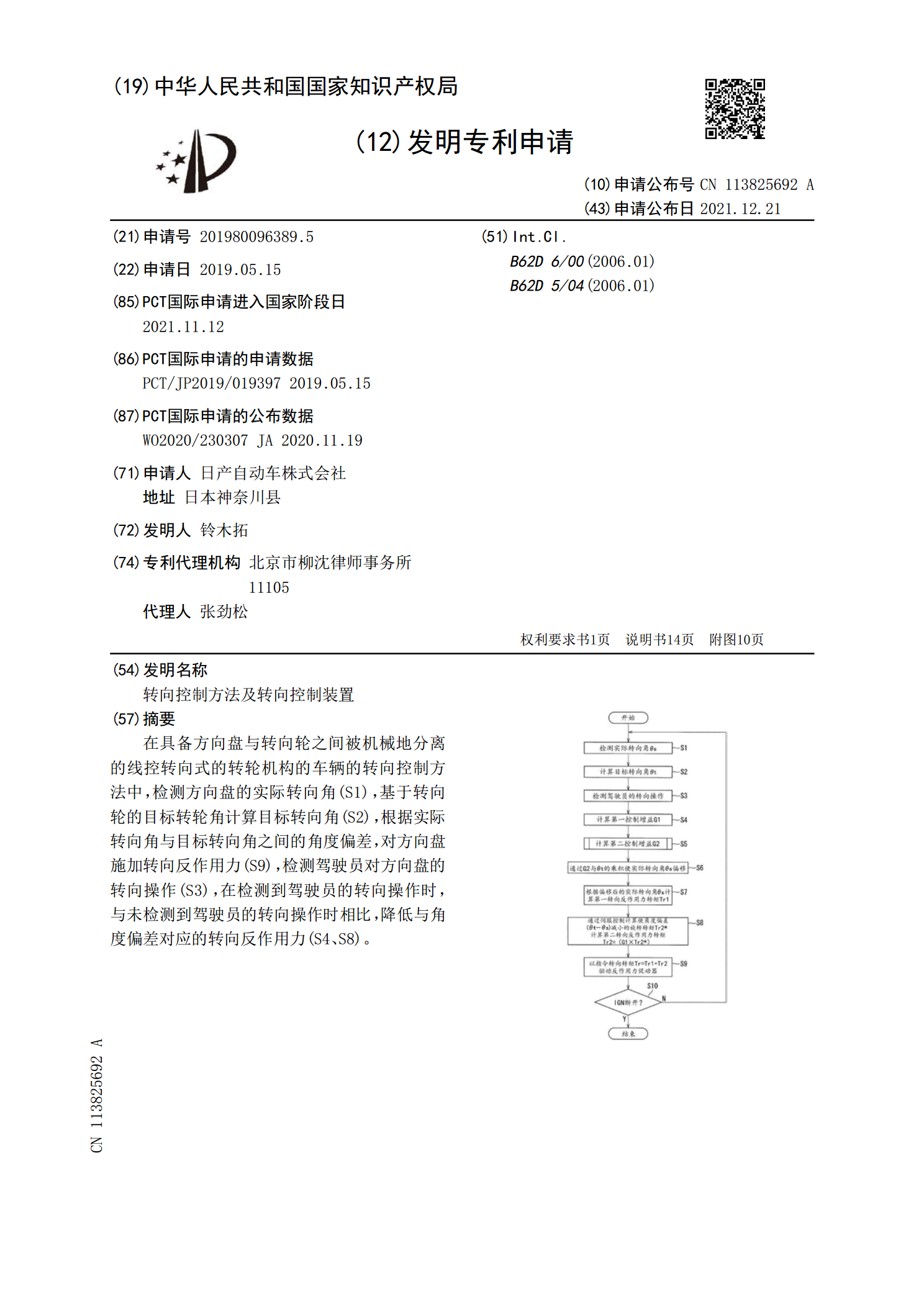
在具备方向盘与转向轮之间被机械地分离的线控转向式的转轮机构的车辆的转向控制方法中,检测方向盘的实际转向角(S1),基于转向轮的目标转轮角计算目标转向角(S2),根据实际转向角与目标转向角之间的角度偏差,对方向盘施加转向反作用力(S9),检测驾驶员对方向盘的转向操作(S3),在检测到驾驶员的转向操作时,与未检测到驾驶员的转向操作时相比,降低与角度偏差对应的转向反作用力(S4、S8)。

电动汽车电动助力转向装置及控制方法.pdf
本发明公开了一种电动汽车电动助力转向装置,包括:壳体;输入轴,其与方向盘连接,所述输入轴下端设置有齿轮;所述输入轴上连接有扭矩传感器;转向杆,其设置在壳体内,所述转向杆上设置要有齿条,所述齿条与所述齿轮啮合,以使转向杆在壳体内左右移动;所述转向杆的左右两端分别连接左转向球头和右转向球头;所述转向杆上还设置有丝杠;滚珠螺母,其套设在丝杠外与所述丝杠配合;所述滚珠螺母两端通过轴承支撑在壳体上;驱动电机,通过传动装置与所述滚珠螺母连接,以驱动所述滚珠螺母绕自身轴线旋转。本发明还提供了一种电动汽车电动助力转向控制
转向控制装置和转向控制方法.pdf
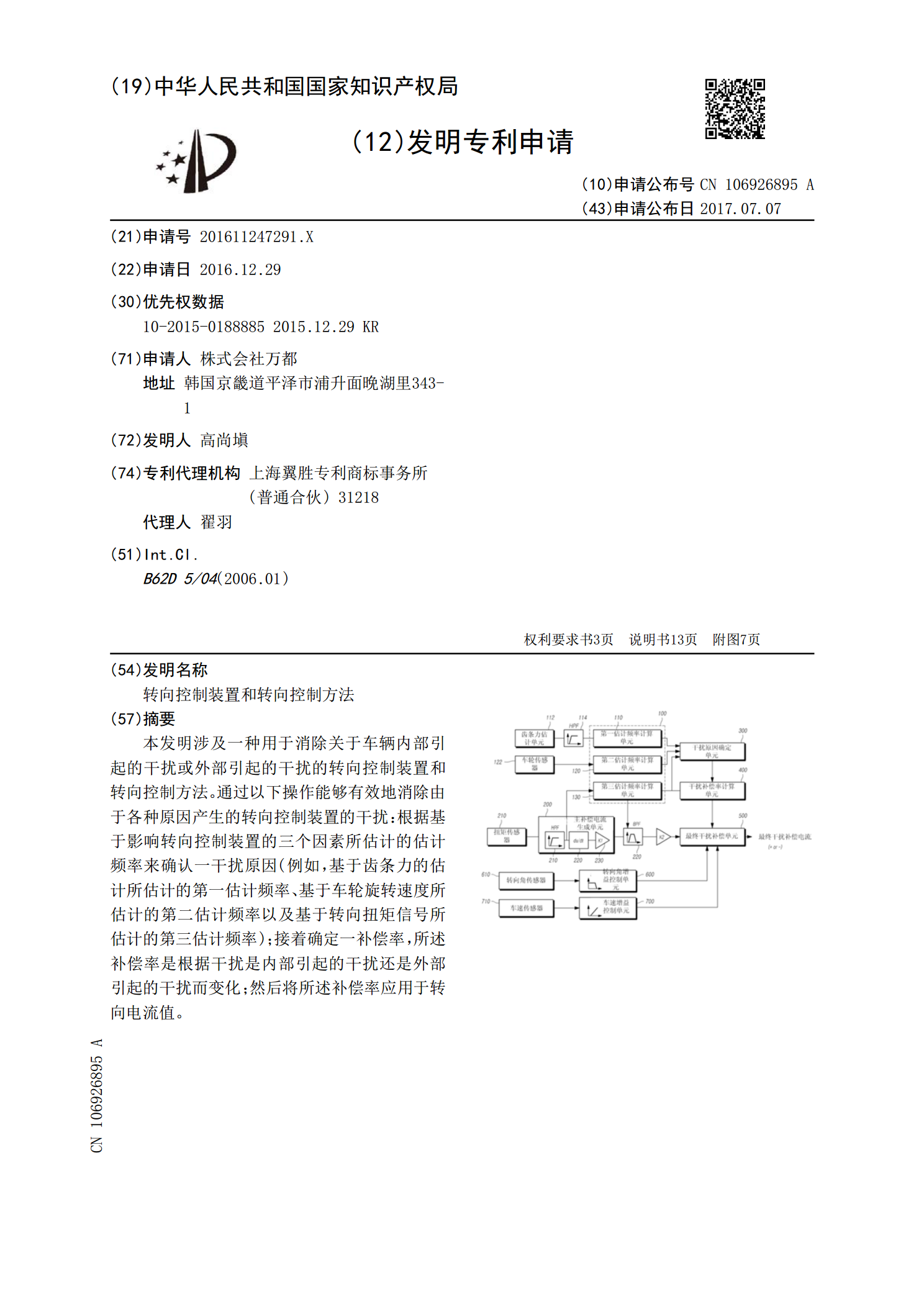
本发明涉及一种用于消除关于车辆内部引起的干扰或外部引起的干扰的转向控制装置和转向控制方法。通过以下操作能够有效地消除由于各种原因产生的转向控制装置的干扰:根据基于影响转向控制装置的三个因素所估计的估计频率来确认一干扰原因(例如,基于齿条力的估计所估计的第一估计频率、基于车轮旋转速度所估计的第二估计频率以及基于转向扭矩信号所估计的第三估计频率);接着确定一补偿率,所述补偿率是根据干扰是内部引起的干扰还是外部引起的干扰而变化;然后将所述补偿率应用于转向电流值。