
用于使车轮转向的装置和方法.pdf

小代****回来


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于使车轮转向的装置和方法.pdf
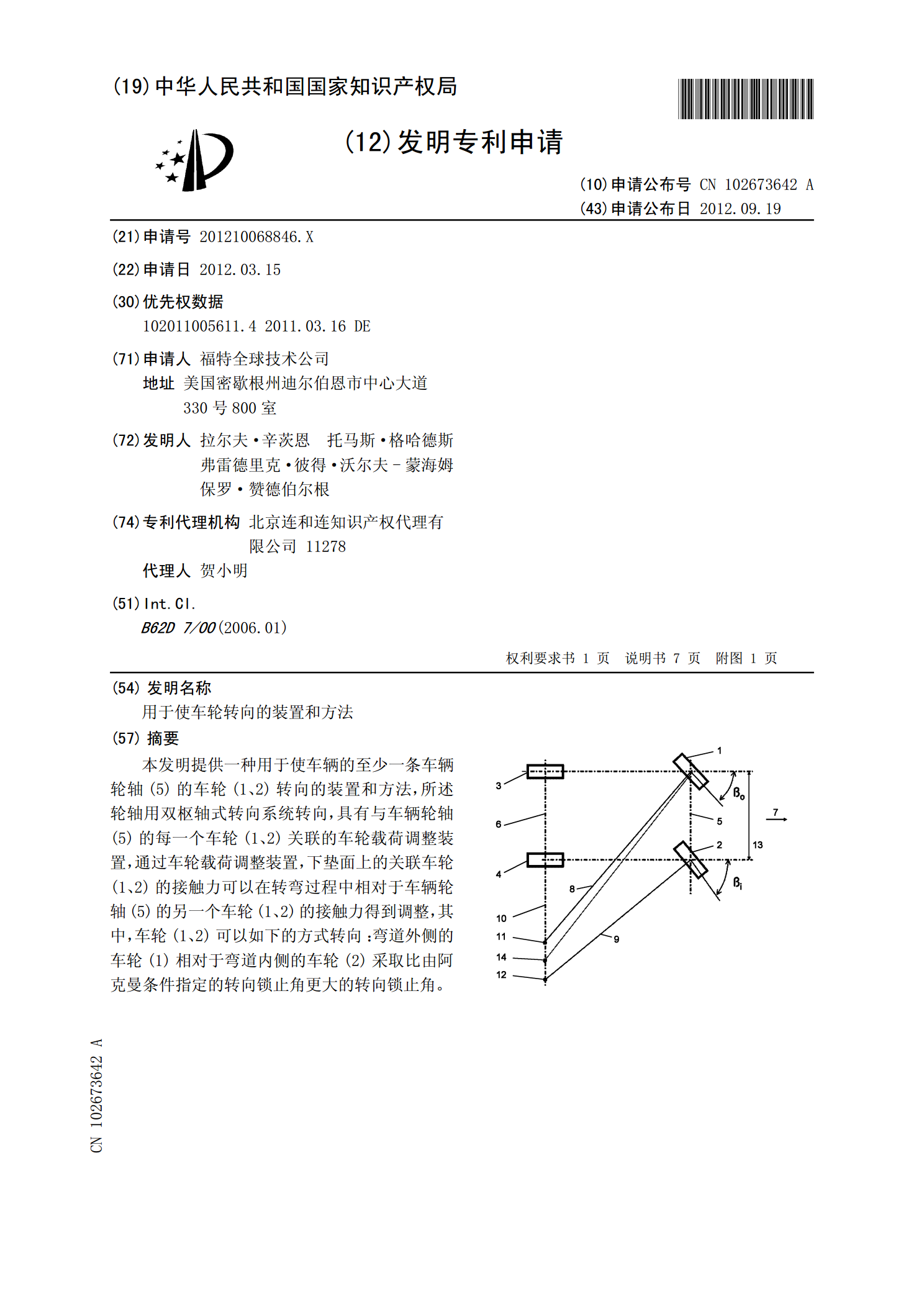
本发明提供一种用于使车辆的至少一条车辆轮轴(5)的车轮(1、2)转向的装置和方法,所述轮轴用双枢轴式转向系统转向,具有与车辆轮轴(5)的每一个车轮(1、2)关联的车轮载荷调整装置,通过车轮载荷调整装置,下垫面上的关联车轮(1、2)的接触力可以在转弯过程中相对于车辆轮轴(5)的另一个车轮(1、2)的接触力得到调整,其中,车轮(1、2)可以如下的方式转向:弯道外侧的车轮(1)相对于弯道内侧的车轮(2)采取比由阿克曼条件指定的转向锁止角更大的转向锁止角。
用于构建用于车轮的轮胎的装置和方法.pdf
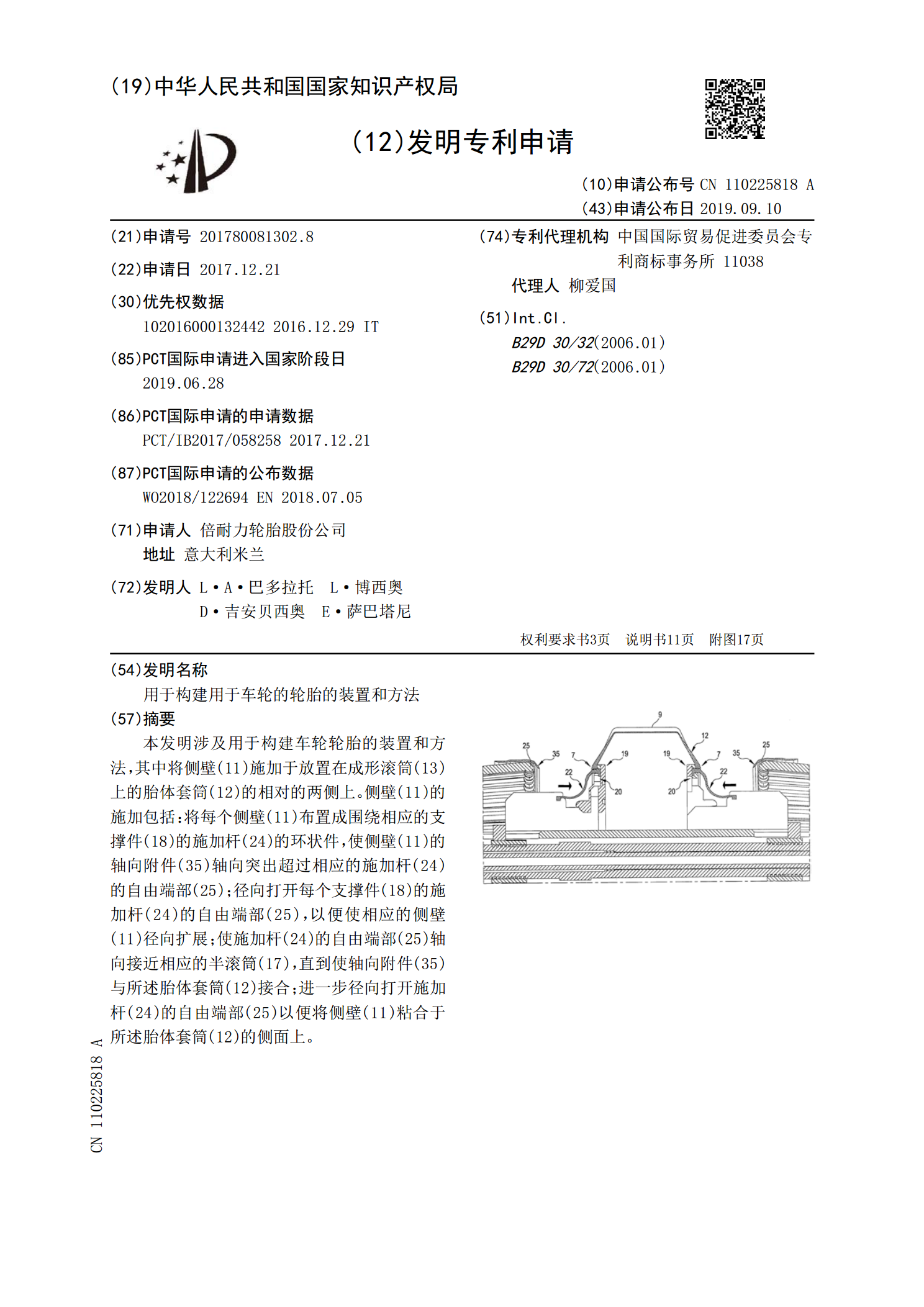
本发明涉及用于构建车轮轮胎的装置和方法,其中将侧壁(11)施加于放置在成形滚筒(13)上的胎体套筒(12)的相对的两侧上。侧壁(11)的施加包括:将每个侧壁(11)布置成围绕相应的支撑件(18)的施加杆(24)的环状件,使侧壁(11)的轴向附件(35)轴向突出超过相应的施加杆(24)的自由端部(25);径向打开每个支撑件(18)的施加杆(24)的自由端部(25),以便使相应的侧壁(11)径向扩展;使施加杆(24)的自由端部(25)轴向接近相应的半滚筒(17),直到使轴向附件(35)与所述胎体套筒(12)接
车轮转向角的控制方法、装置和车轮转向角控制器.pdf
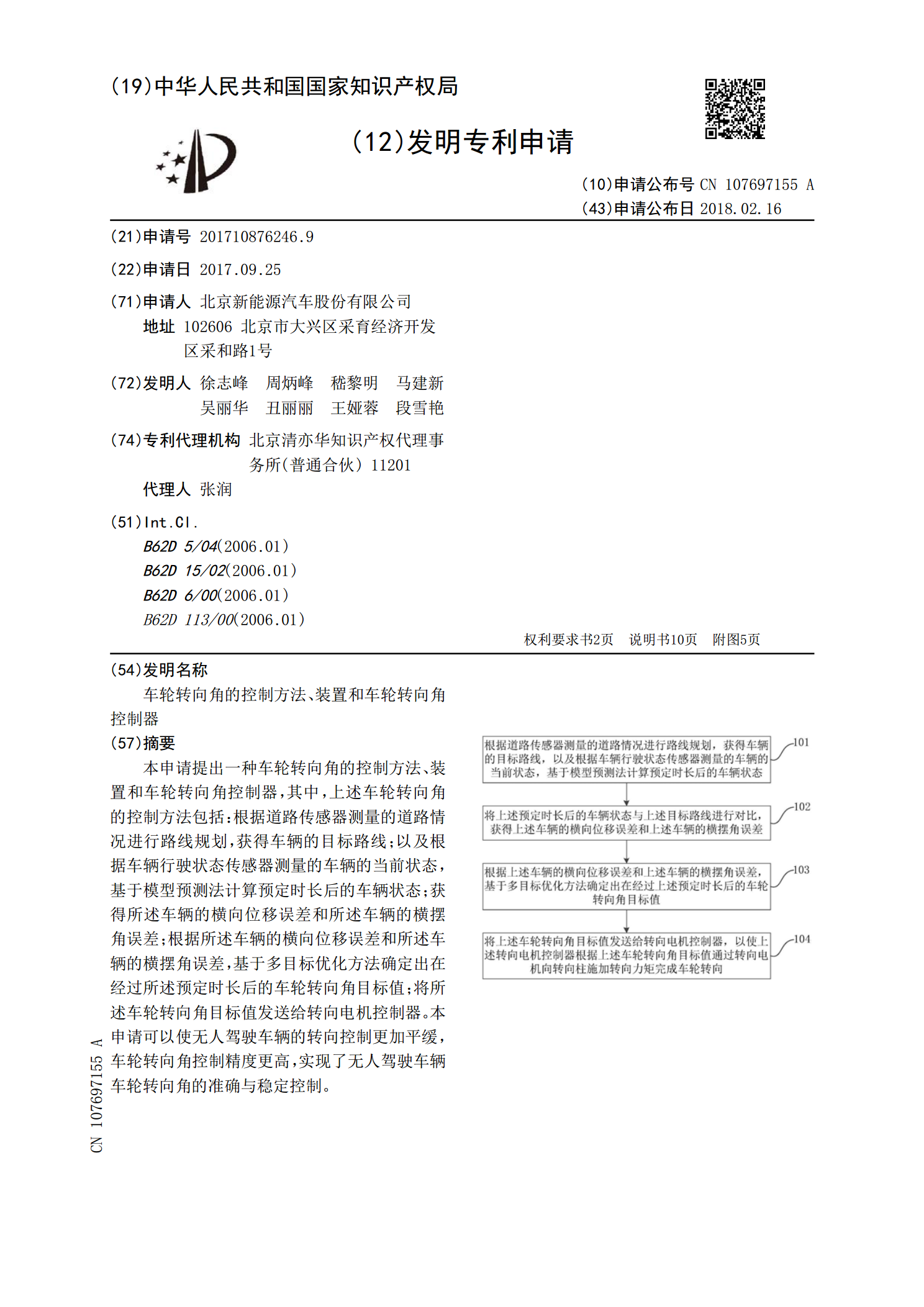
本申请提出一种车轮转向角的控制方法、装置和车轮转向角控制器,其中,上述车轮转向角的控制方法包括:根据道路传感器测量的道路情况进行路线规划,获得车辆的目标路线;以及根据车辆行驶状态传感器测量的车辆的当前状态,基于模型预测法计算预定时长后的车辆状态;获得所述车辆的横向位移误差和所述车辆的横摆角误差;根据所述车辆的横向位移误差和所述车辆的横摆角误差,基于多目标优化方法确定出在经过所述预定时长后的车轮转向角目标值;将所述车轮转向角目标值发送给转向电机控制器。本申请可以使无人驾驶车辆的转向控制更加平缓,车轮转向角控

用于限制车轮滑移的方法和装置.pdf
本发明涉及用于限制车轮滑移的方法和装置。具体地,提供了一种发动机控制系统,包括发动机速度控制模块和空转限制模块。发动机速度控制模块基于怠速需求选择性地控制发动机。空转限制模块选择性地将怠速需求减小一个基于车轮滑移值的量。

用于电动车的车轮转向装置.pdf
本发明公开了用于电动车的车轮转向装置,包括轮毂电机,所述轮毂电机的两侧连接连杆,所述轮毂电机位于内环内,所述连杆远离轮毂电机的一端均与内环固定连接,还包括套设在内环外的外环,所述外环与内环同心,且外环与内环之间能够相对转动;所述外环上设置环形的齿条,所述齿条上啮合齿轮;还包括用于驱动所述齿轮转动的驱动装置,所述驱动装置与内环相对固定。本发明的目的在于提供用于电动车的车轮转向装置,以解决现有技术中电动车转向必须伴随车体前进才能完成的问题,实现灵活方便的对电动车车轮进行直接转向的目的。