
车轮转向角的控制方法、装置和车轮转向角控制器.pdf

是湛****21

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车轮转向角的控制方法、装置和车轮转向角控制器.pdf
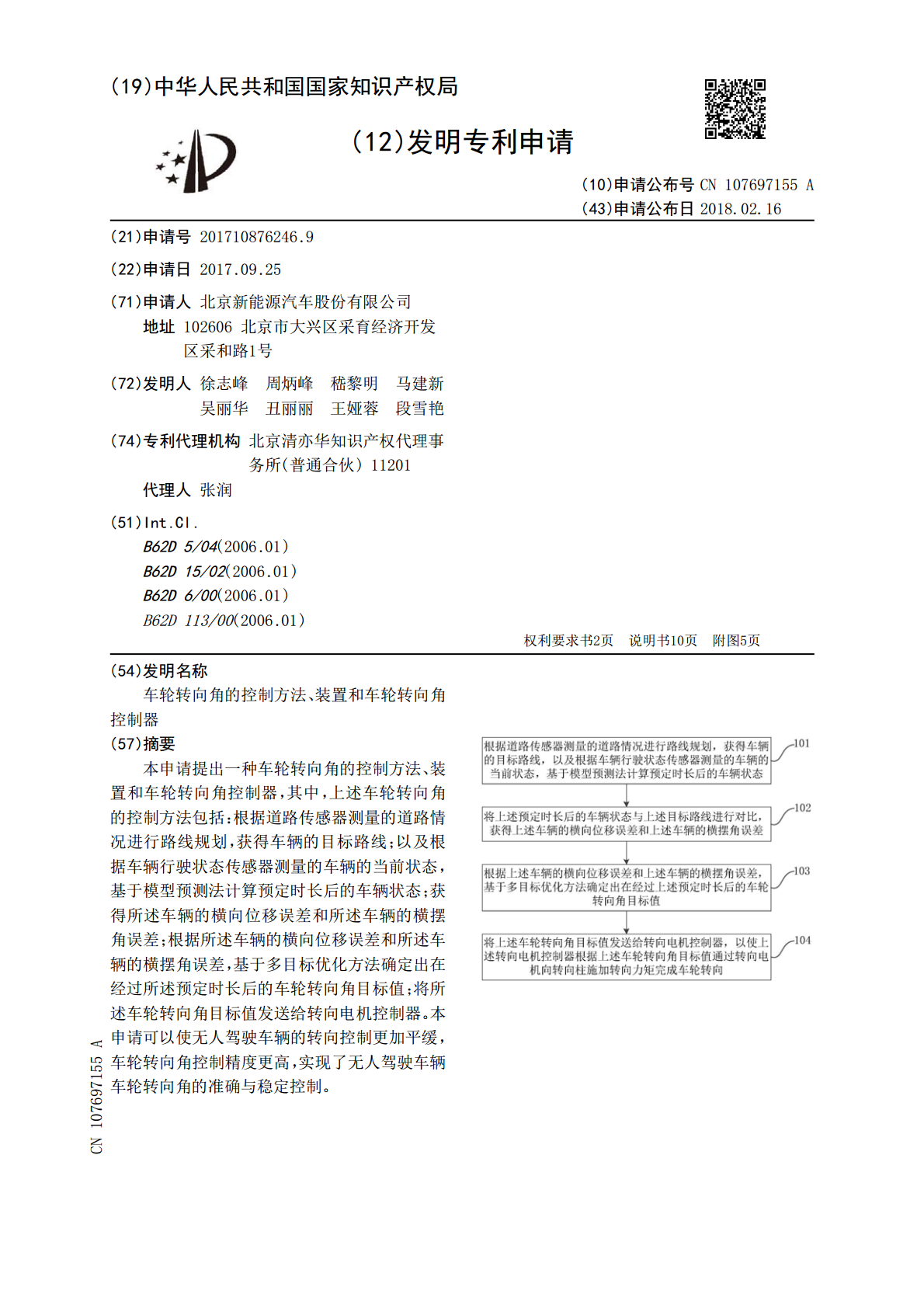
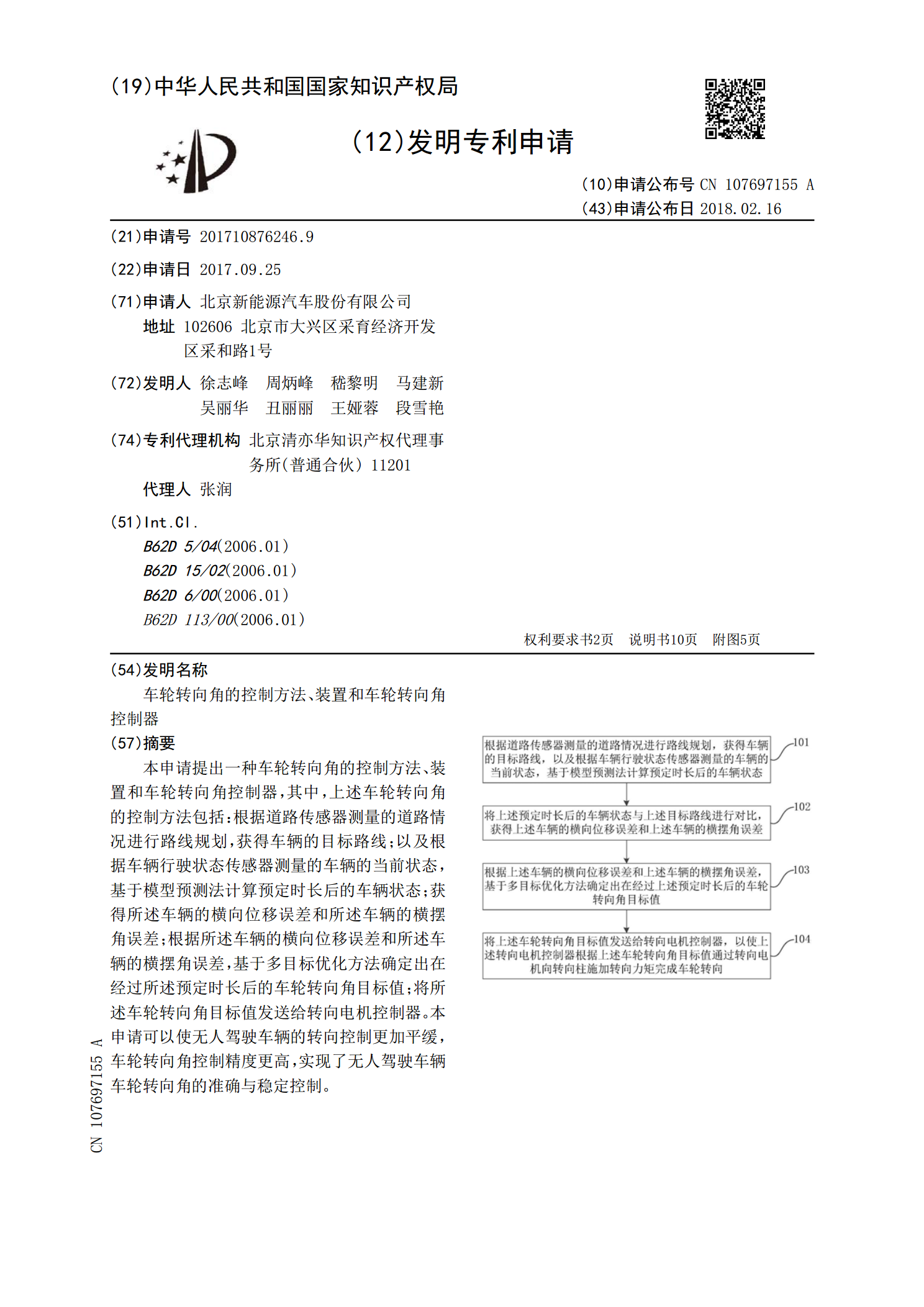
本申请提出一种车轮转向角的控制方法、装置和车轮转向角控制器,其中,上述车轮转向角的控制方法包括:根据道路传感器测量的道路情况进行路线规划,获得车辆的目标路线;以及根据车辆行驶状态传感器测量的车辆的当前状态,基于模型预测法计算预定时长后的车辆状态;获得所述车辆的横向位移误差和所述车辆的横摆角误差;根据所述车辆的横向位移误差和所述车辆的横摆角误差,基于多目标优化方法确定出在经过所述预定时长后的车轮转向角目标值;将所述车轮转向角目标值发送给转向电机控制器。本申请可以使无人驾驶车辆的转向控制更加平缓,车轮转向角控

一种汽车转向车轮的转向角修正装置.pdf
本发明公开了一种汽车转向车轮的转向角修正装置,包括转向梯形,转向梯形包括前车轴、横拉杆、转向梯形臂,以及分别设置在前车轴两端的转向节,前车轴两端分别通过转向主销与对应的转向节连接;转向主销与相邻的转向节之间均设有转向角度传感器;横拉杆中间设有长度调节装置;转向角度传感器的控制端电联有一电子控制器,长度调节装置的控制端也与电子控制器电联。电子控制器根据转向角度传感器反馈的信息来控制长度调节装置,以实时修正转向梯形,故能够将由转向盘施加于前左转向车轮的输入转向角α〞,通过实时修正的转向梯形,能够驱动右转向车轮
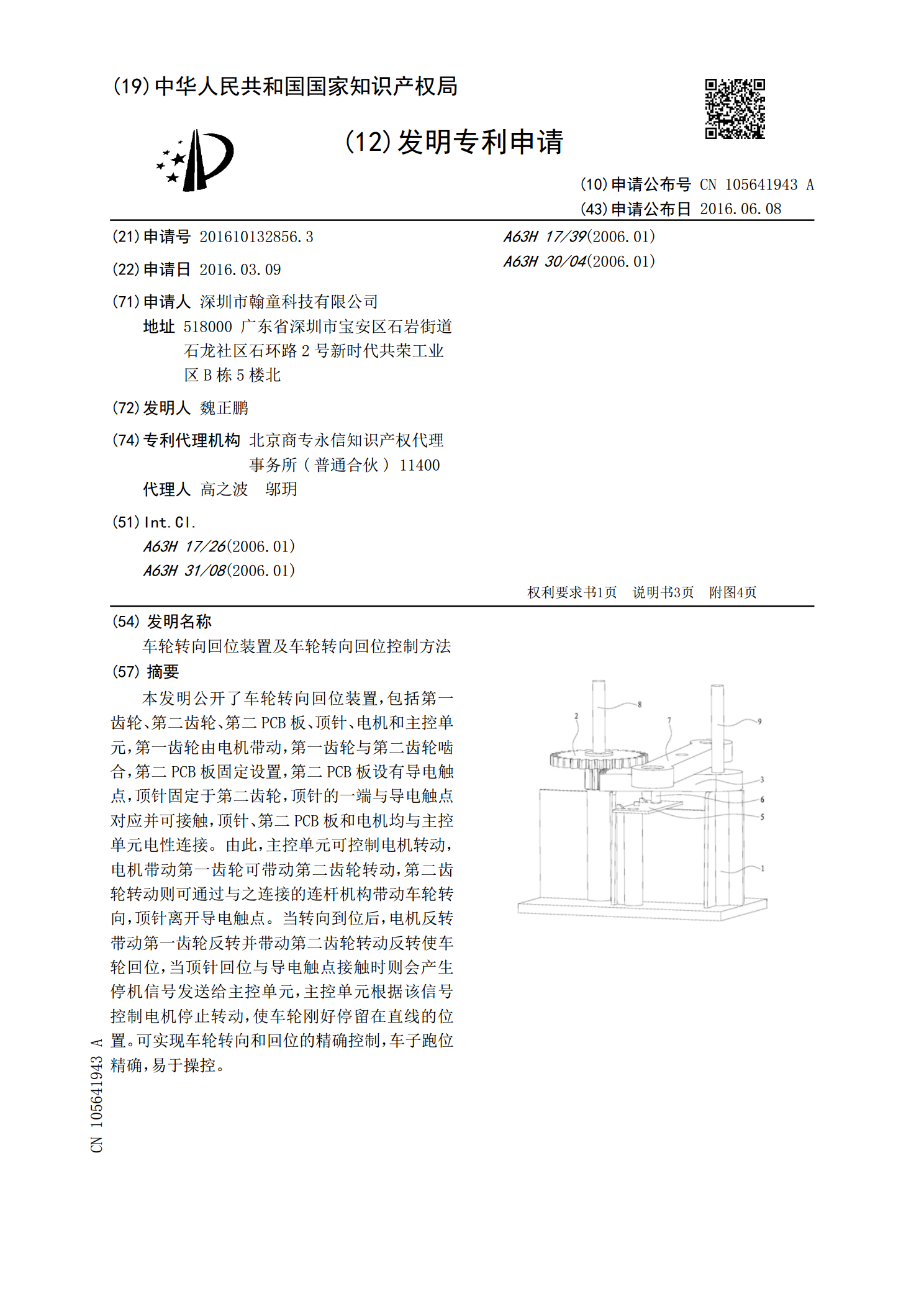
车轮转向回位装置及车轮转向回位控制方法.pdf
本发明公开了车轮转向回位装置,包括第一齿轮、第二齿轮、第二PCB板、顶针、电机和主控单元,第一齿轮由电机带动,第一齿轮与第二齿轮啮合,第二PCB板固定设置,第二PCB板设有导电触点,顶针固定于第二齿轮,顶针的一端与导电触点对应并可接触,顶针、第二PCB板和电机均与主控单元电性连接。由此,主控单元可控制电机转动,电机带动第一齿轮可带动第二齿轮转动,第二齿轮转动则可通过与之连接的连杆机构带动车轮转向,顶针离开导电触点。当转向到位后,电机反转带动第一齿轮反转并带动第二齿轮转动反转使车轮回位,当顶针回位与导电触点

车轮的转向装置.pdf
车轮(1)利用专用的轮内马达单元(2)进行驱动。车轮(1)的悬架是通过上臂(6)、下臂(7)、侧连杆(8)、减震器(9)并借助单元(2)的壳体(4)来进行的。臂(6、7)的车宽方向内侧基端(6a、7a)以能沿上下方向摇动的方式支承于车体。臂(6)的自由端(6b)以能沿上下方向摇动的方式枢轴支承于连杆(8)的上端,连杆(8)的下端以能够摇动的方式枢轴支承于减震器(9)的活塞杆(9a)。将壳体(4)的上侧固定座(11)以可绕主销轴线(Kp)摇动的方式安装于连杆(8),将壳体(4)的下侧固定座(12)以可绕主销
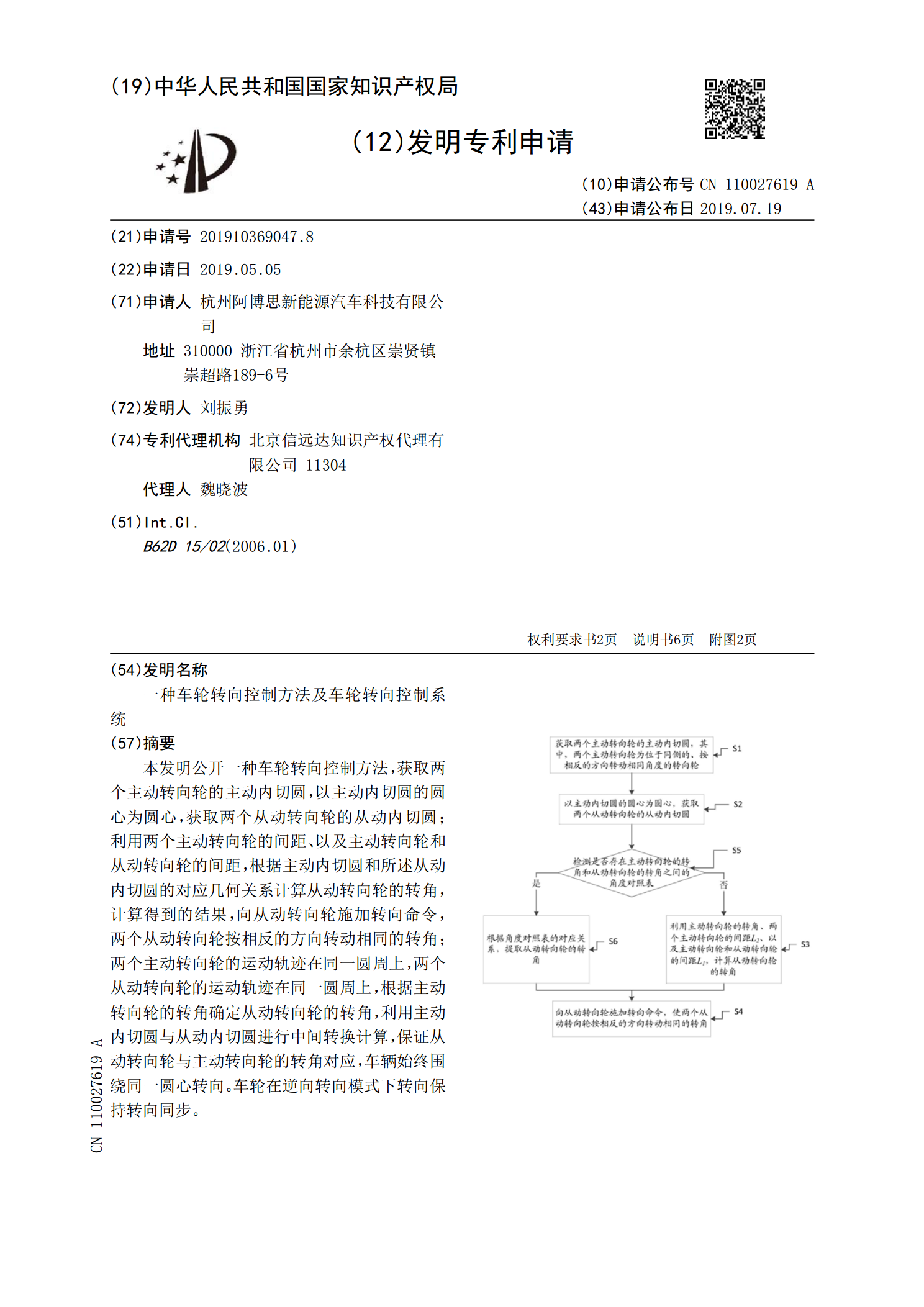
一种车轮转向控制方法及车轮转向控制系统.pdf
本发明公开一种车轮转向控制方法,获取两个主动转向轮的主动内切圆,以主动内切圆的圆心为圆心,获取两个从动转向轮的从动内切圆;利用两个主动转向轮的间距、以及主动转向轮和从动转向轮的间距,根据主动内切圆和所述从动内切圆的对应几何关系计算从动转向轮的转角,计算得到的结果,向从动转向轮施加转向命令,两个从动转向轮按相反的方向转动相同的转角;两个主动转向轮的运动轨迹在同一圆周上,两个从动转向轮的运动轨迹在同一圆周上,根据主动转向轮的转角确定从动转向轮的转角,利用主动内切圆与从动内切圆进行中间转换计算,保证从动转向轮与