
一种主动式轨道车辆防碰撞系统及其防碰撞方法.pdf

如灵****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种主动式轨道车辆防碰撞系统及其防碰撞方法.pdf
一种主动式轨道车辆防碰撞系统及其防碰撞方法,该系统的实施依靠车载主机、驱动装置和断路装置三部分,车载主机控制驱动装置和断路装置运行,发射、处理和分析测距信号;断路装置控制轨道车辆的轮轴两端的连通状态;驱动装置用来驱动轨道车辆的运行,根据车载主机的命令实现轨道车辆的加速、减速、制动和启动。本发明系统能够精确测量出前后两列轨道车辆的相对轨道距离,并能够进行防碰撞预测,调节轨道车辆的运行参数,有效且主动避免轨道车辆发生碰撞事故。
车辆防碰撞系统、车辆及其防碰撞方法.pdf
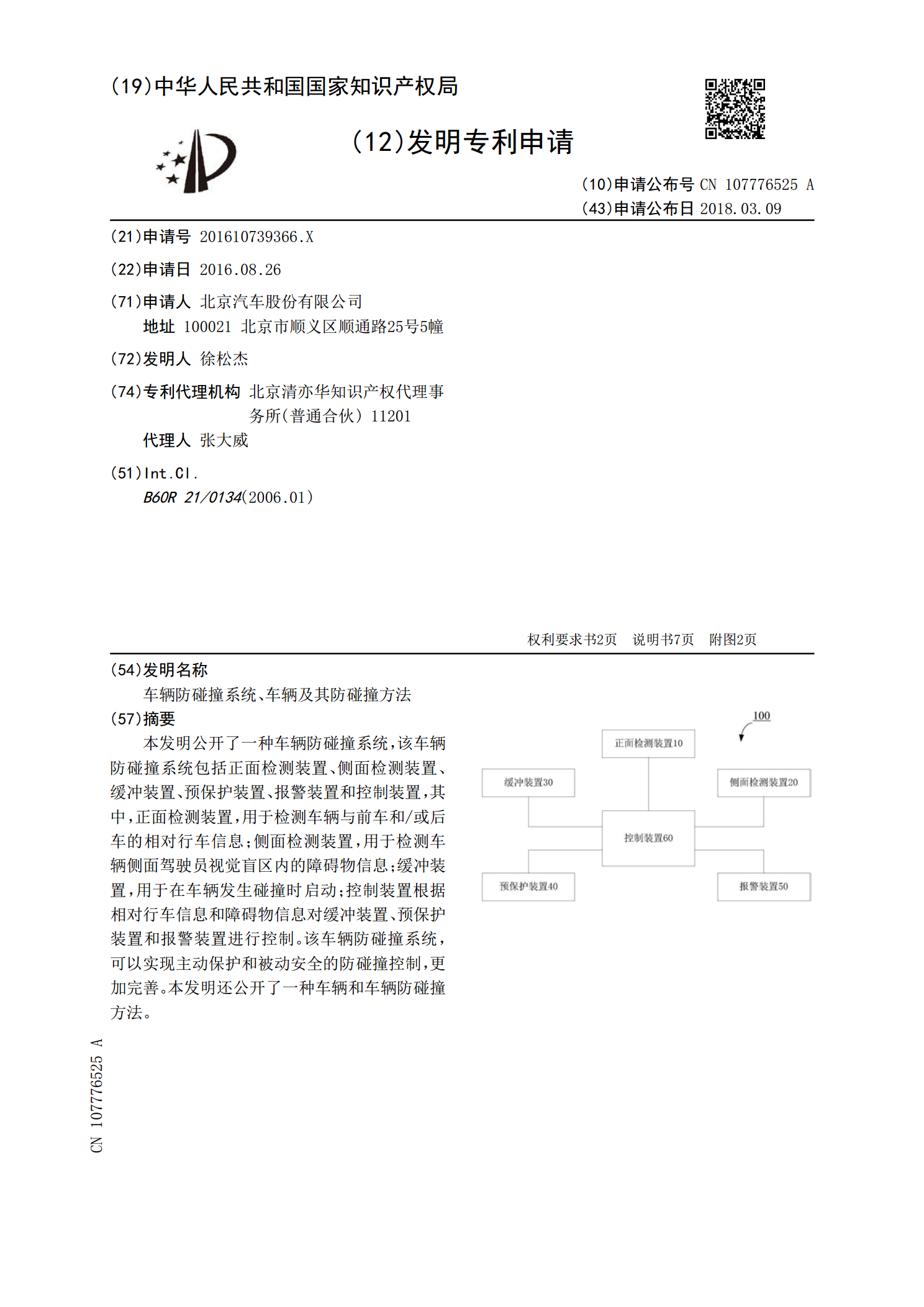
本发明公开了一种车辆防碰撞系统,该车辆防碰撞系统包括正面检测装置、侧面检测装置、缓冲装置、预保护装置、报警装置和控制装置,其中,正面检测装置,用于检测车辆与前车和/或后车的相对行车信息;侧面检测装置,用于检测车辆侧面驾驶员视觉盲区内的障碍物信息;缓冲装置,用于在车辆发生碰撞时启动;控制装置根据相对行车信息和障碍物信息对缓冲装置、预保护装置和报警装置进行控制。该车辆防碰撞系统,可以实现主动保护和被动安全的防碰撞控制,更加完善。本发明还公开了一种车辆和车辆防碰撞方法。
一种焦炉机车的防碰撞系统及其防碰撞控制方法.pdf
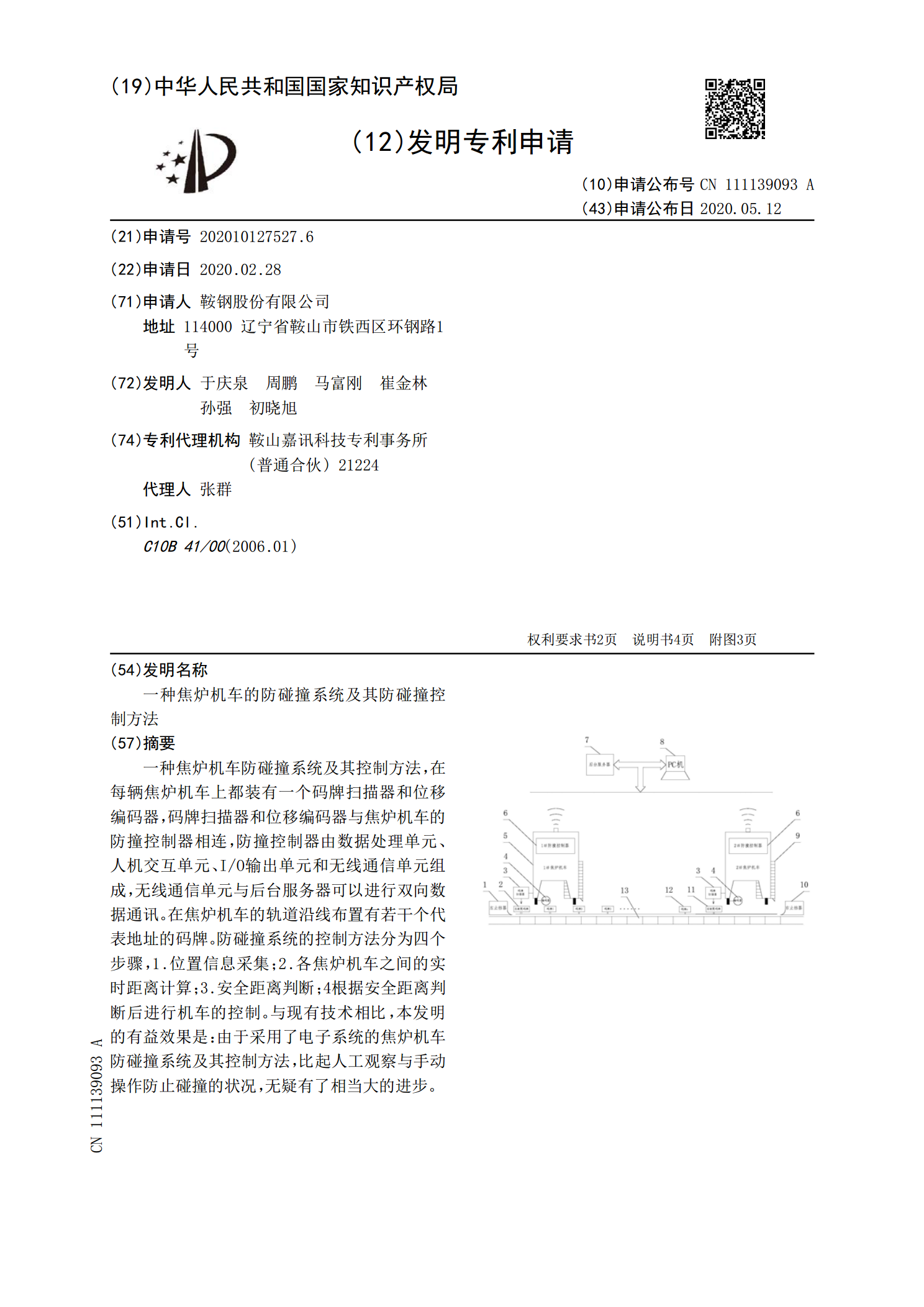
一种焦炉机车防碰撞系统及其控制方法,在每辆焦炉机车上都装有一个码牌扫描器和位移编码器,码牌扫描器和位移编码器与焦炉机车的防撞控制器相连,防撞控制器由数据处理单元、人机交互单元、I/O输出单元和无线通信单元组成,无线通信单元与后台服务器可以进行双向数据通讯。在焦炉机车的轨道沿线布置有若干个代表地址的码牌。防碰撞系统的控制方法分为四个步骤,1.位置信息采集;2.各焦炉机车之间的实时距离计算;3.安全距离判断;4根据安全距离判断后进行机车的控制。与现有技术相比,本发明的有益效果是:由于采用了电子系统的焦炉机车防
一种焦炉生产车辆主动防碰撞的方法.pdf
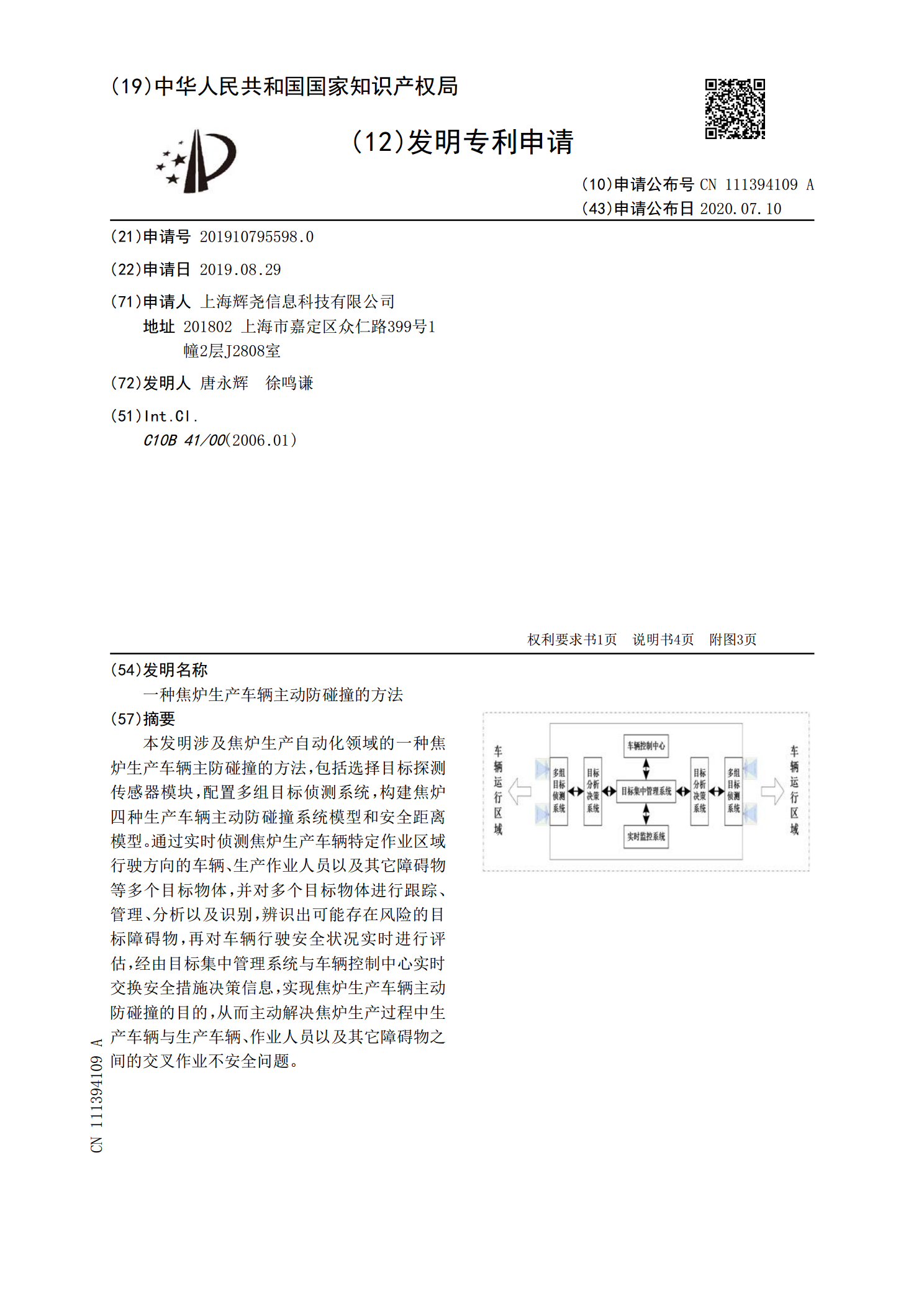
本发明涉及焦炉生产自动化领域的一种焦炉生产车辆主防碰撞的方法,包括选择目标探测传感器模块,配置多组目标侦测系统,构建焦炉四种生产车辆主动防碰撞系统模型和安全距离模型。通过实时侦测焦炉生产车辆特定作业区域行驶方向的车辆、生产作业人员以及其它障碍物等多个目标物体,并对多个目标物体进行跟踪、管理、分析以及识别,辨识出可能存在风险的目标障碍物,再对车辆行驶安全状况实时进行评估,经由目标集中管理系统与车辆控制中心实时交换安全措施决策信息,实现焦炉生产车辆主动防碰撞的目的,从而主动解决焦炉生产过程中生产车辆与生产车辆
一种防碰撞取料机及其防碰撞系统.pdf
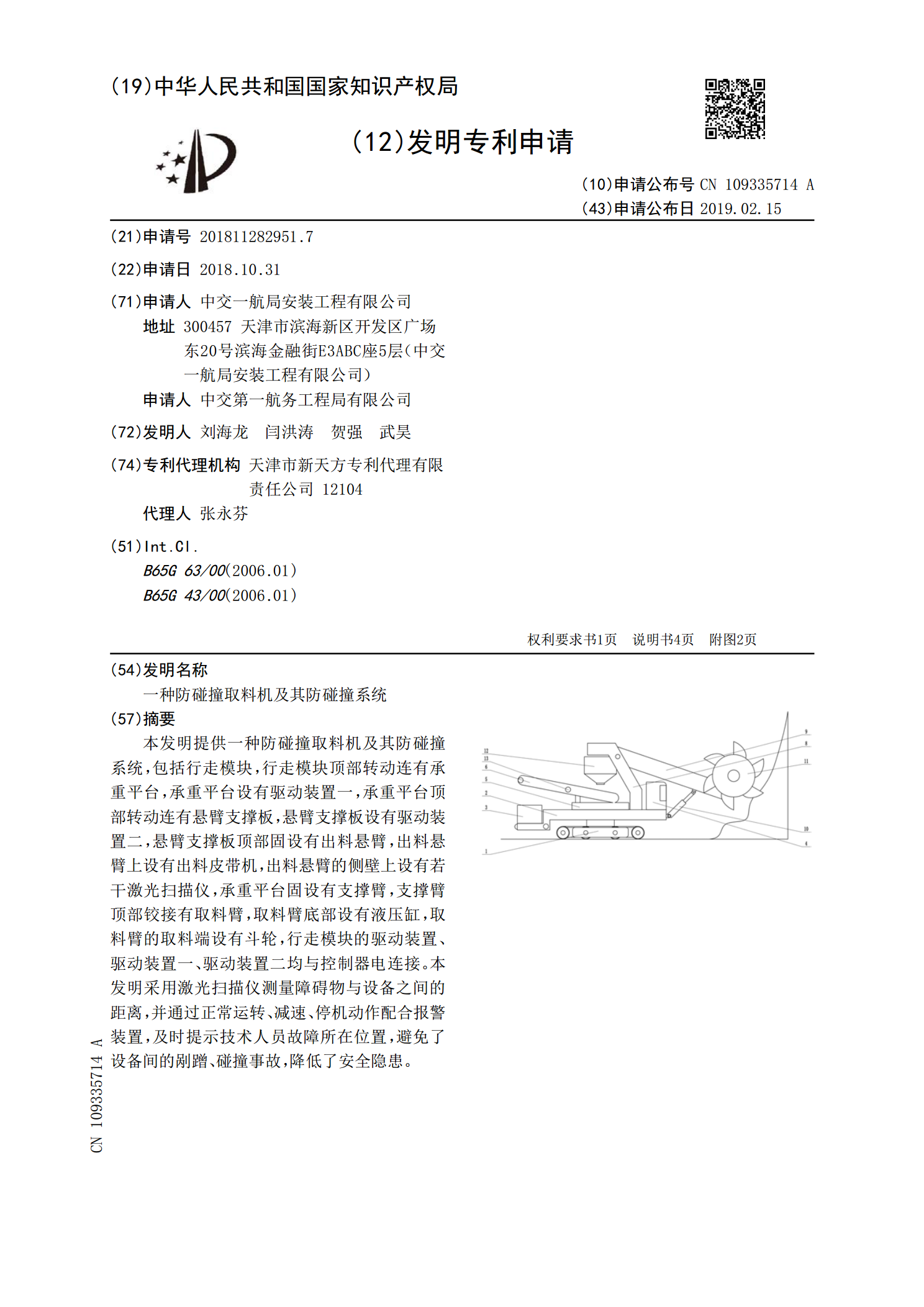
本发明提供一种防碰撞取料机及其防碰撞系统,包括行走模块,行走模块顶部转动连有承重平台,承重平台设有驱动装置一,承重平台顶部转动连有悬臂支撑板,悬臂支撑板设有驱动装置二,悬臂支撑板顶部固设有出料悬臂,出料悬臂上设有出料皮带机,出料悬臂的侧壁上设有若干激光扫描仪,承重平台固设有支撑臂,支撑臂顶部铰接有取料臂,取料臂底部设有液压缸,取料臂的取料端设有斗轮,行走模块的驱动装置、驱动装置一、驱动装置二均与控制器电连接。本发明采用激光扫描仪测量障碍物与设备之间的距离,并通过正常运转、减速、停机动作配合报警装置,及时提