
一种绳驱动多关节机器人.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种绳驱动多关节机器人.pdf
本发明属于关节机器人领域,具体为一种绳驱动多关节机器人,解决了多关节的钢丝绳传动及布置的问题。该绳驱动多关节机器人分为手部、腕部、小臂、上臂、肩部、腰部及基座,基座上设置腰部,腰部通过曲轴组件与肩部连接,肩部通过旋转关节轴与上臂连接,上臂通过旋转关节轴上的从动轮组件Ⅱ与小臂连接,小臂通过旋转关节轴上的从动轮组件Ⅰ与腕部连接,腕部通过旋转关节轴与手部连接,相互连接的各个部分之间形成多个关节,多关节的绳传动单元通过柔绳分别与腰部、肩部、上臂、小臂、腕部、手部之一或两个以上连接,形成绳驱动多关节机器人。本发明机
一种双侧绳轮驱动的机器人关节装置.pdf
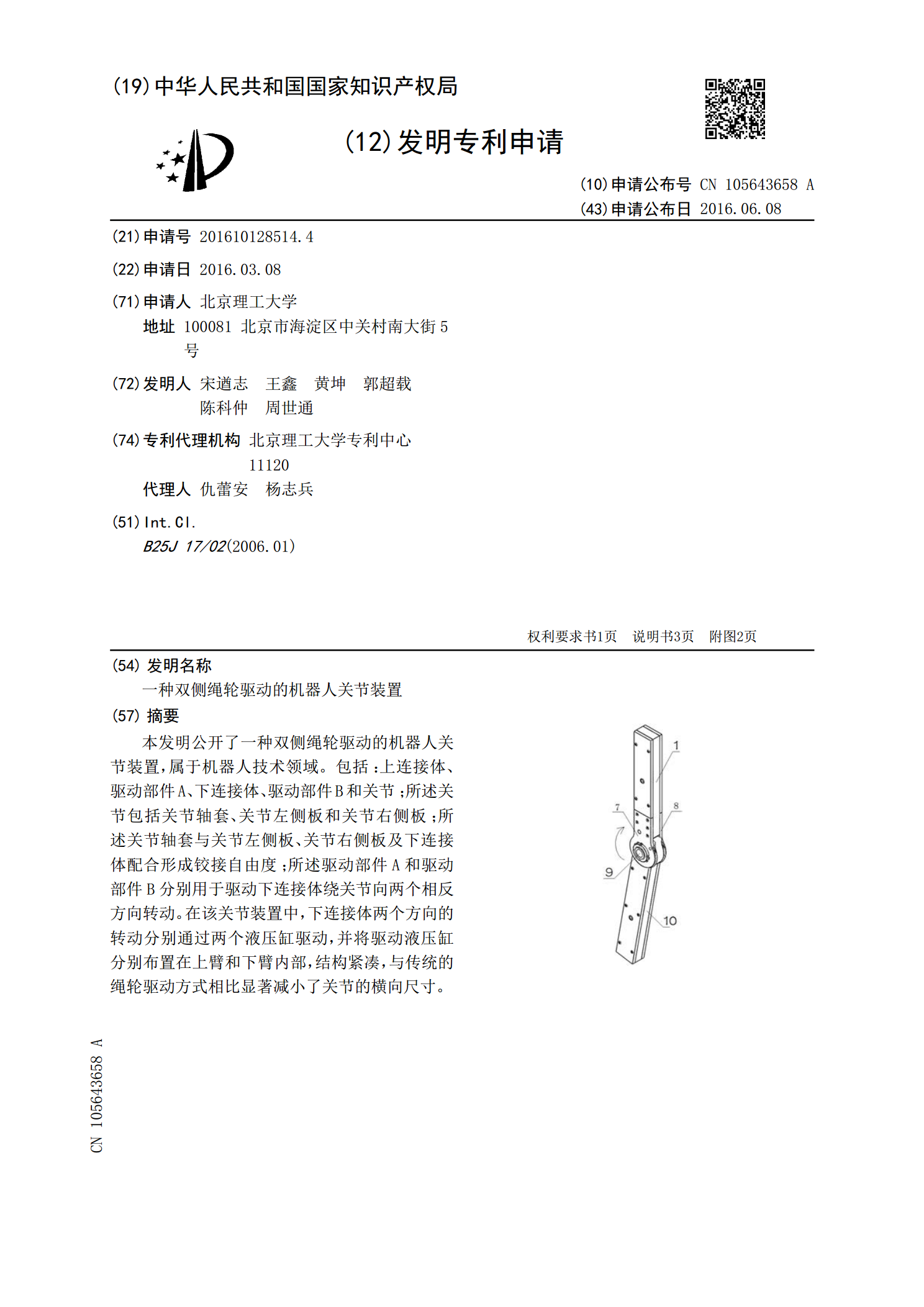
本发明公开了一种双侧绳轮驱动的机器人关节装置,属于机器人技术领域。包括:上连接体、驱动部件A、下连接体、驱动部件B和关节;所述关节包括关节轴套、关节左侧板和关节右侧板;所述关节轴套与关节左侧板、关节右侧板及下连接体配合形成铰接自由度;所述驱动部件A和驱动部件B分别用于驱动下连接体绕关节向两个相反方向转动。在该关节装置中,下连接体两个方向的转动分别通过两个液压缸驱动,并将驱动液压缸分别布置在上臂和下臂内部,结构紧凑,与传统的绳轮驱动方式相比显著减小了关节的横向尺寸。
柔性绳驱动踝关节康复机器人.pdf
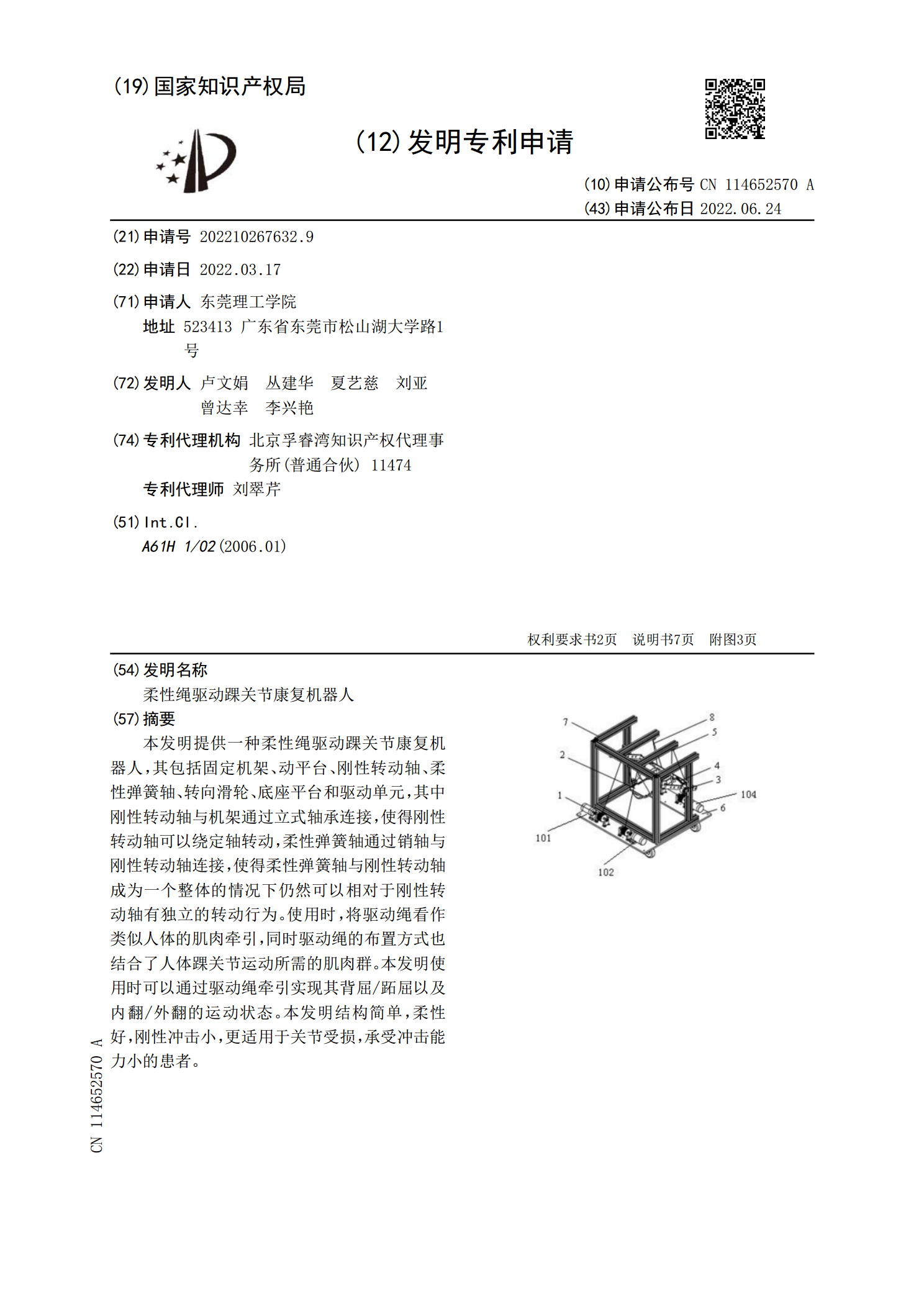
本发明提供一种柔性绳驱动踝关节康复机器人,其包括固定机架、动平台、刚性转动轴、柔性弹簧轴、转向滑轮、底座平台和驱动单元,其中刚性转动轴与机架通过立式轴承连接,使得刚性转动轴可以绕定轴转动,柔性弹簧轴通过销轴与刚性转动轴连接,使得柔性弹簧轴与刚性转动轴成为一个整体的情况下仍然可以相对于刚性转动轴有独立的转动行为。使用时,将驱动绳看作类似人体的肌肉牵引,同时驱动绳的布置方式也结合了人体踝关节运动所需的肌肉群。本发明使用时可以通过驱动绳牵引实现其背屈/跖屈以及内翻/外翻的运动状态。本发明结构简单,柔性好,刚性冲
一种绳驱动摆转关节模块.pdf
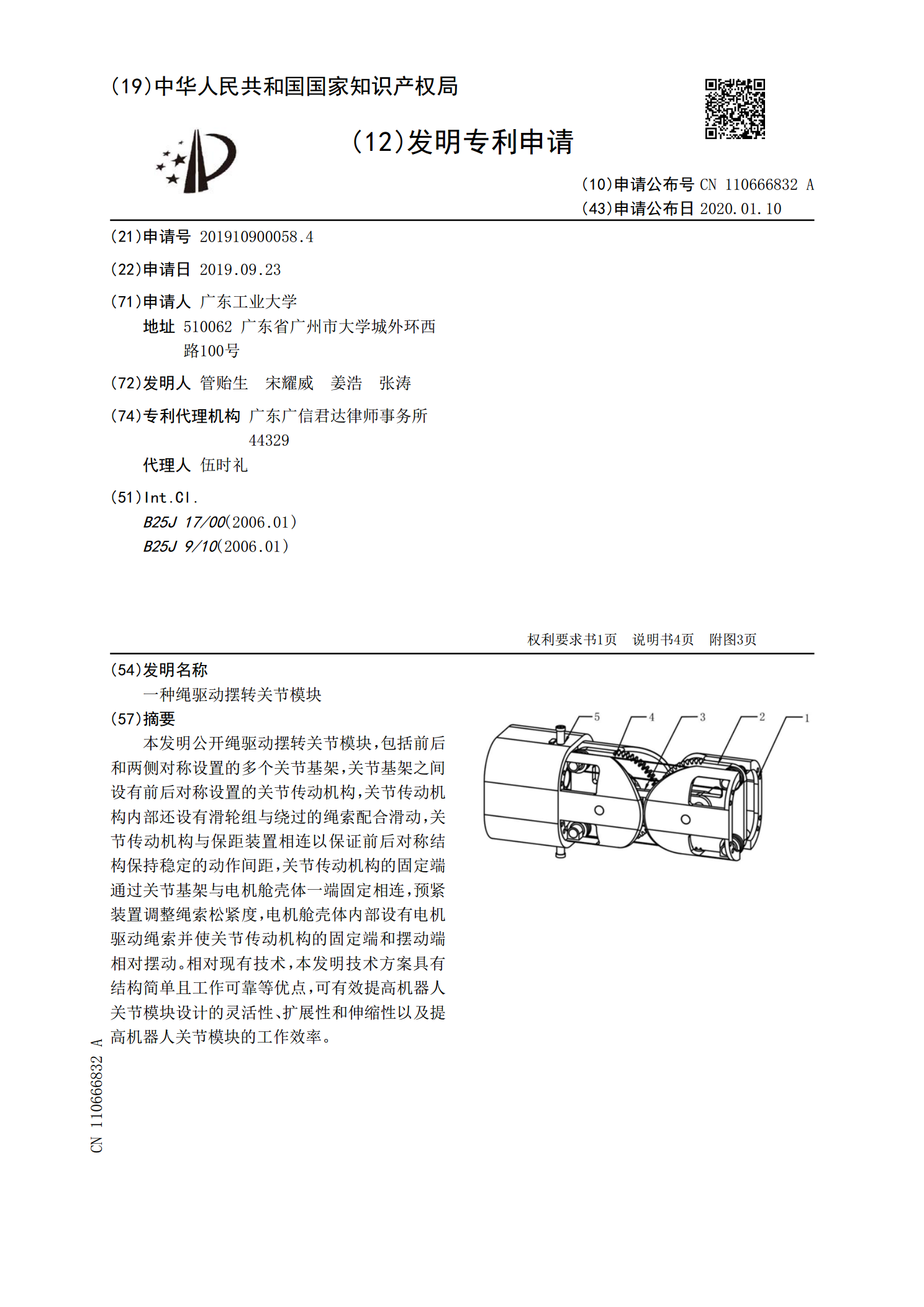
本发明公开绳驱动摆转关节模块,包括前后和两侧对称设置的多个关节基架,关节基架之间设有前后对称设置的关节传动机构,关节传动机构内部还设有滑轮组与绕过的绳索配合滑动,关节传动机构与保距装置相连以保证前后对称结构保持稳定的动作间距,关节传动机构的固定端通过关节基架与电机舱壳体一端固定相连,预紧装置调整绳索松紧度,电机舱壳体内部设有电机驱动绳索并使关节传动机构的固定端和摆动端相对摆动。相对现有技术,本发明技术方案具有结构简单且工作可靠等优点,可有效提高机器人关节模块设计的灵活性、扩展性和伸缩性以及提高机器人关节模
一种绳驱动机械臂转动关节的结构.pdf
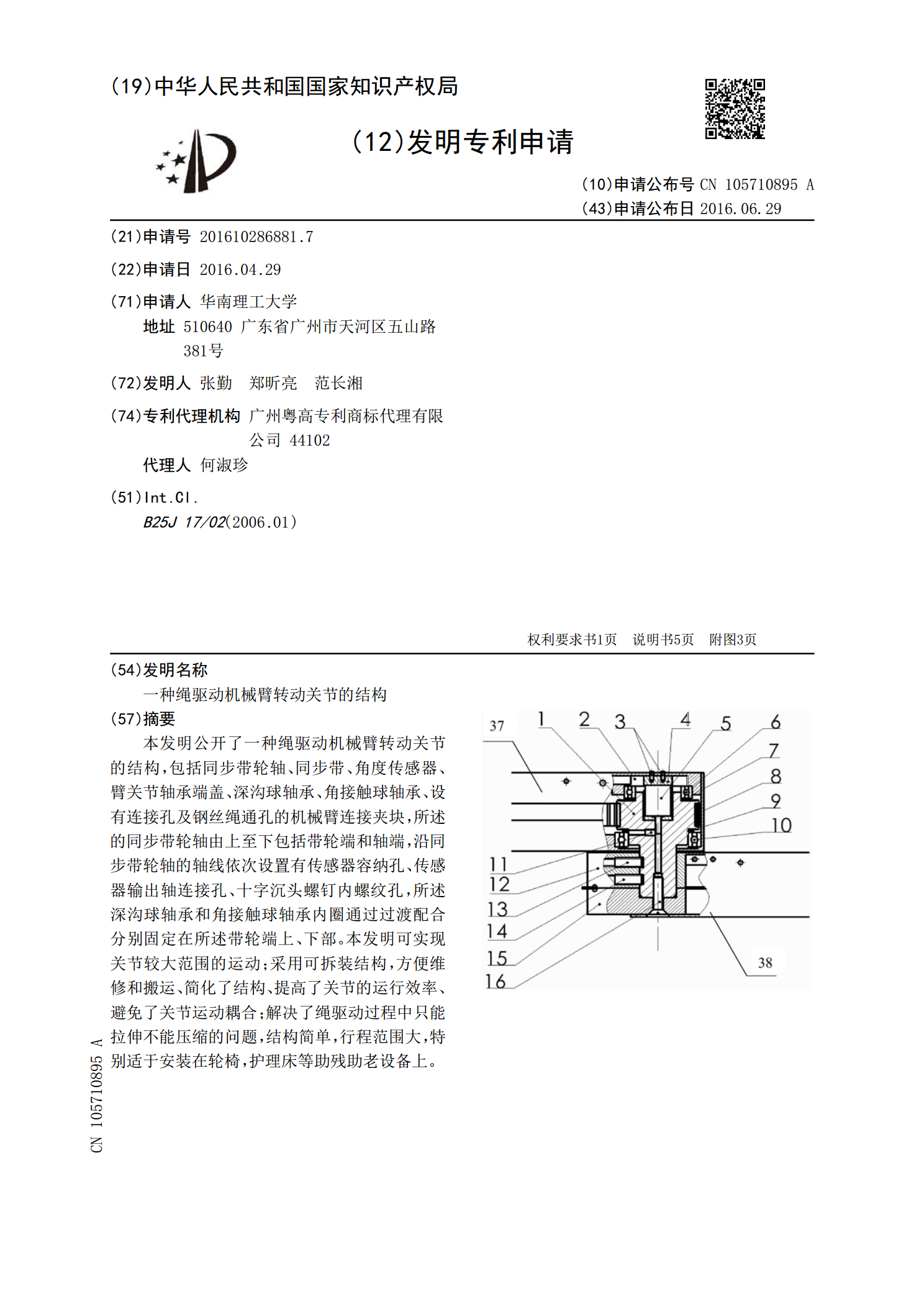
本发明公开了一种绳驱动机械臂转动关节的结构,包括同步带轮轴、同步带、角度传感器、臂关节轴承端盖、深沟球轴承、角接触球轴承、设有连接孔及钢丝绳通孔的机械臂连接夹块,所述的同步带轮轴由上至下包括带轮端和轴端,沿同步带轮轴的轴线依次设置有传感器容纳孔、传感器输出轴连接孔、十字沉头螺钉内螺纹孔,所述深沟球轴承和角接触球轴承内圈通过过渡配合分别固定在所述带轮端上、下部。本发明可实现关节较大范围的运动;采用可拆装结构,方便维修和搬运、简化了结构、提高了关节的运行效率、避免了关节运动耦合;解决了绳驱动过程中只能拉伸不能