
一种绳驱动机械臂转动关节的结构.pdf

一只****呀9

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳驱动机械臂转动关节的结构.pdf
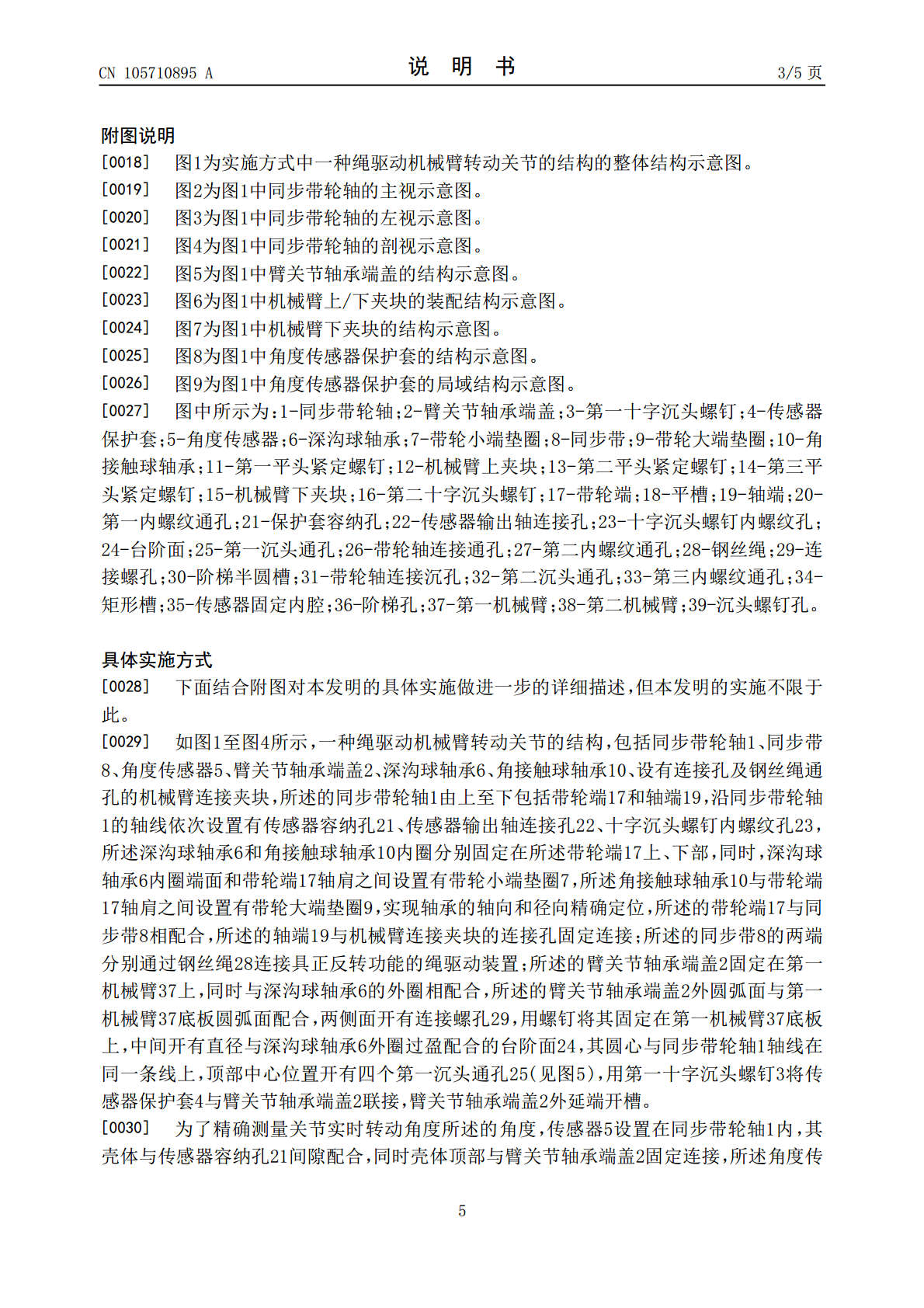
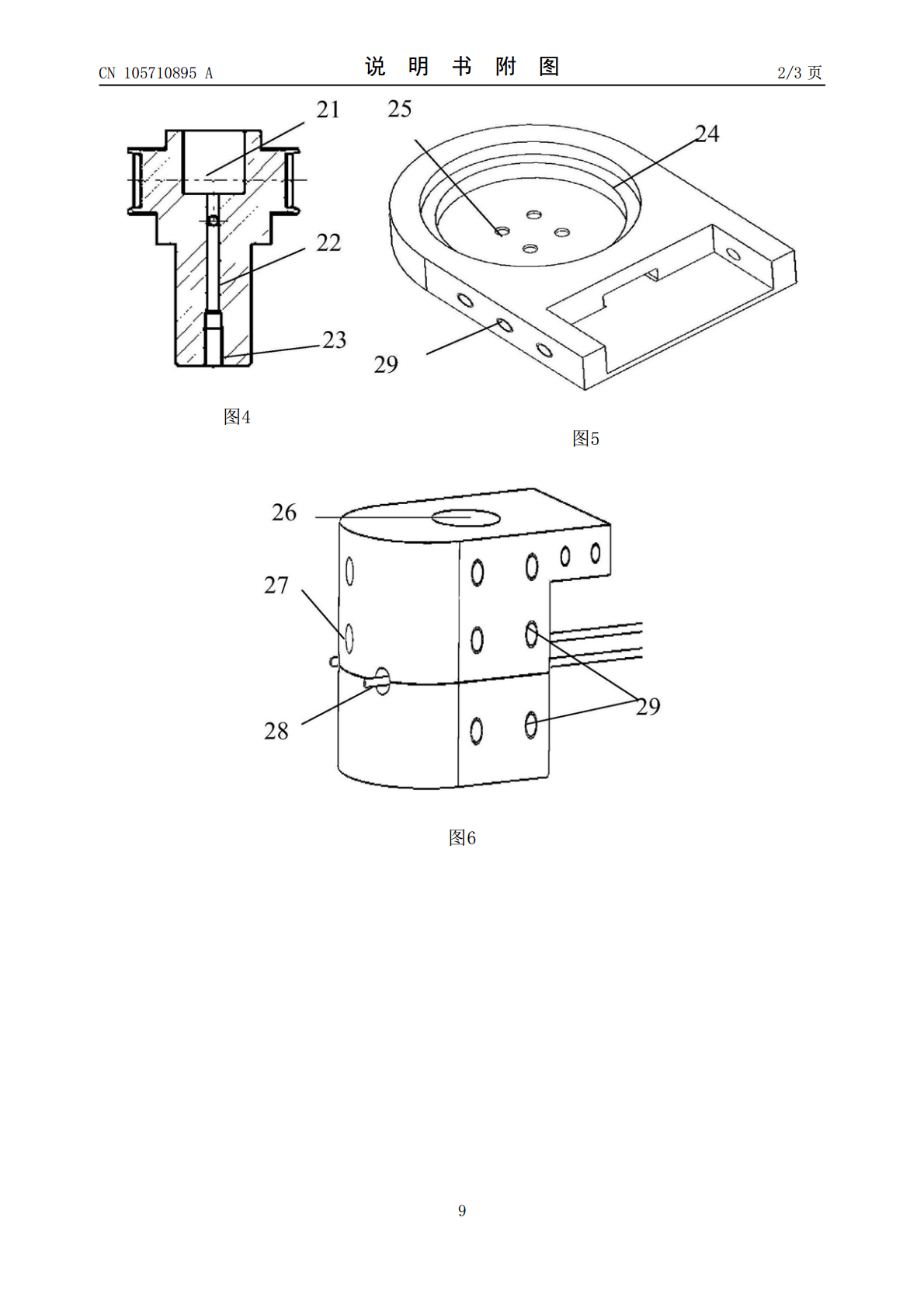
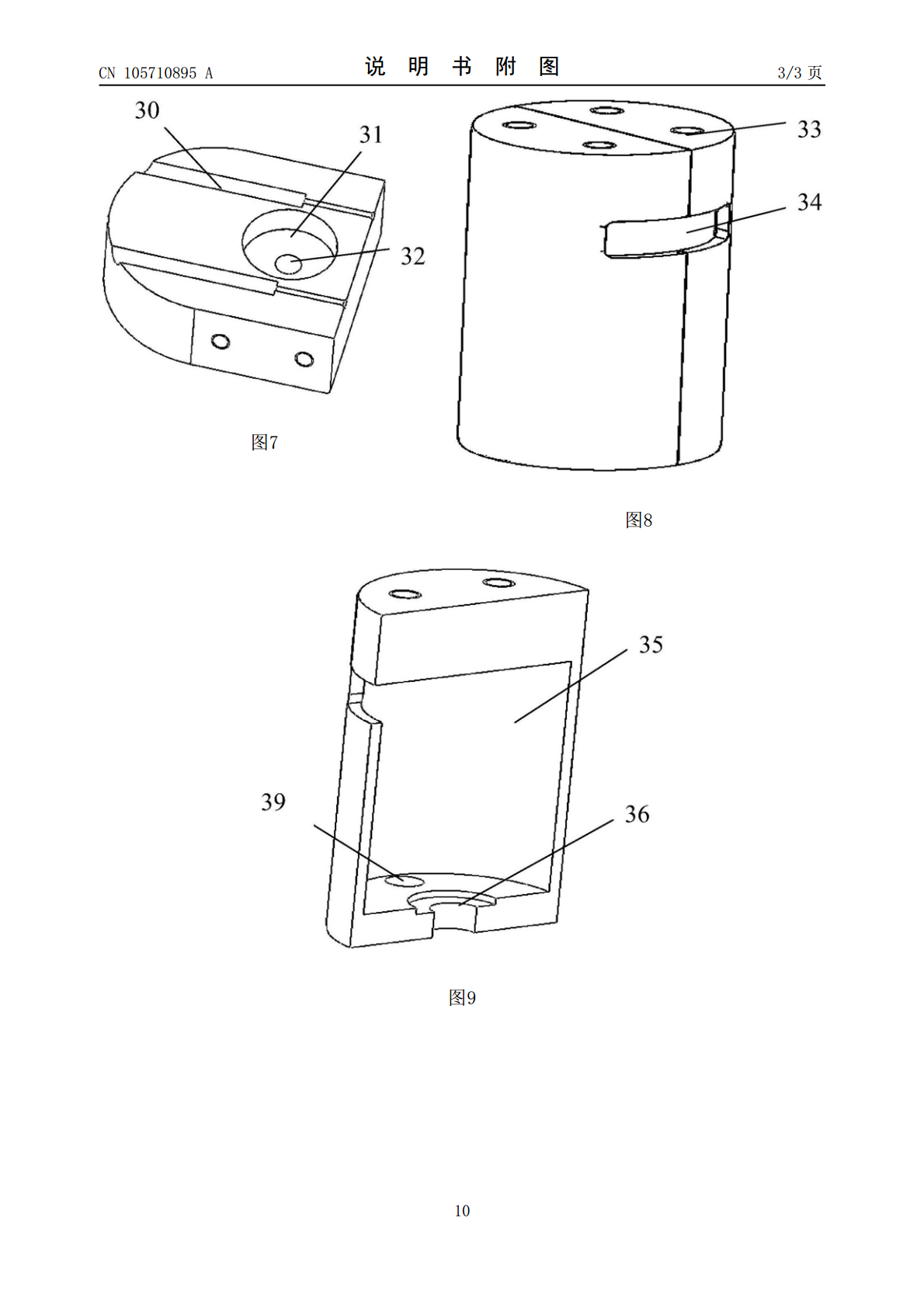
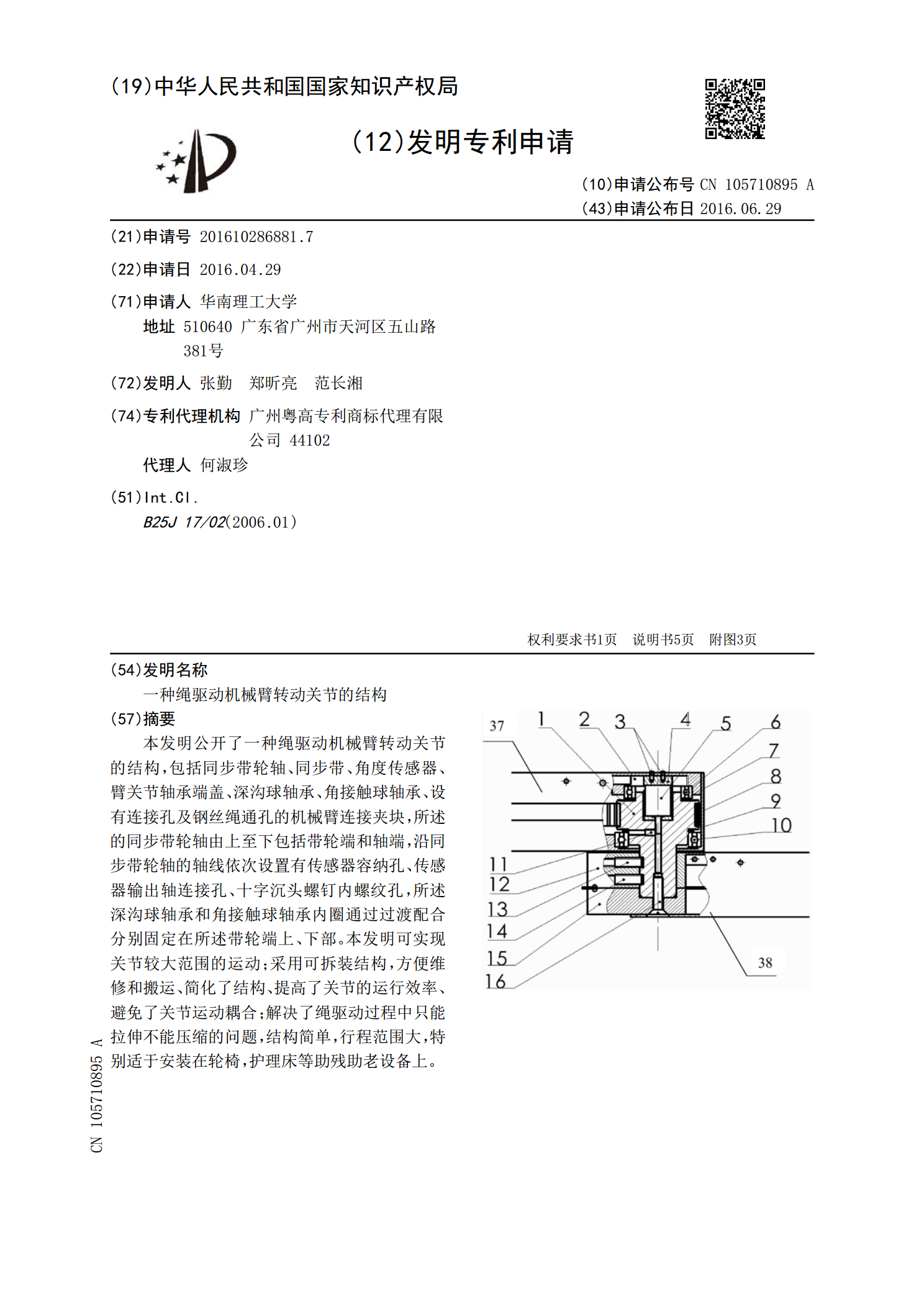
本发明公开了一种绳驱动机械臂转动关节的结构,包括同步带轮轴、同步带、角度传感器、臂关节轴承端盖、深沟球轴承、角接触球轴承、设有连接孔及钢丝绳通孔的机械臂连接夹块,所述的同步带轮轴由上至下包括带轮端和轴端,沿同步带轮轴的轴线依次设置有传感器容纳孔、传感器输出轴连接孔、十字沉头螺钉内螺纹孔,所述深沟球轴承和角接触球轴承内圈通过过渡配合分别固定在所述带轮端上、下部。本发明可实现关节较大范围的运动;采用可拆装结构,方便维修和搬运、简化了结构、提高了关节的运行效率、避免了关节运动耦合;解决了绳驱动过程中只能拉伸不能
机械臂转动关节及医生机械臂.pdf
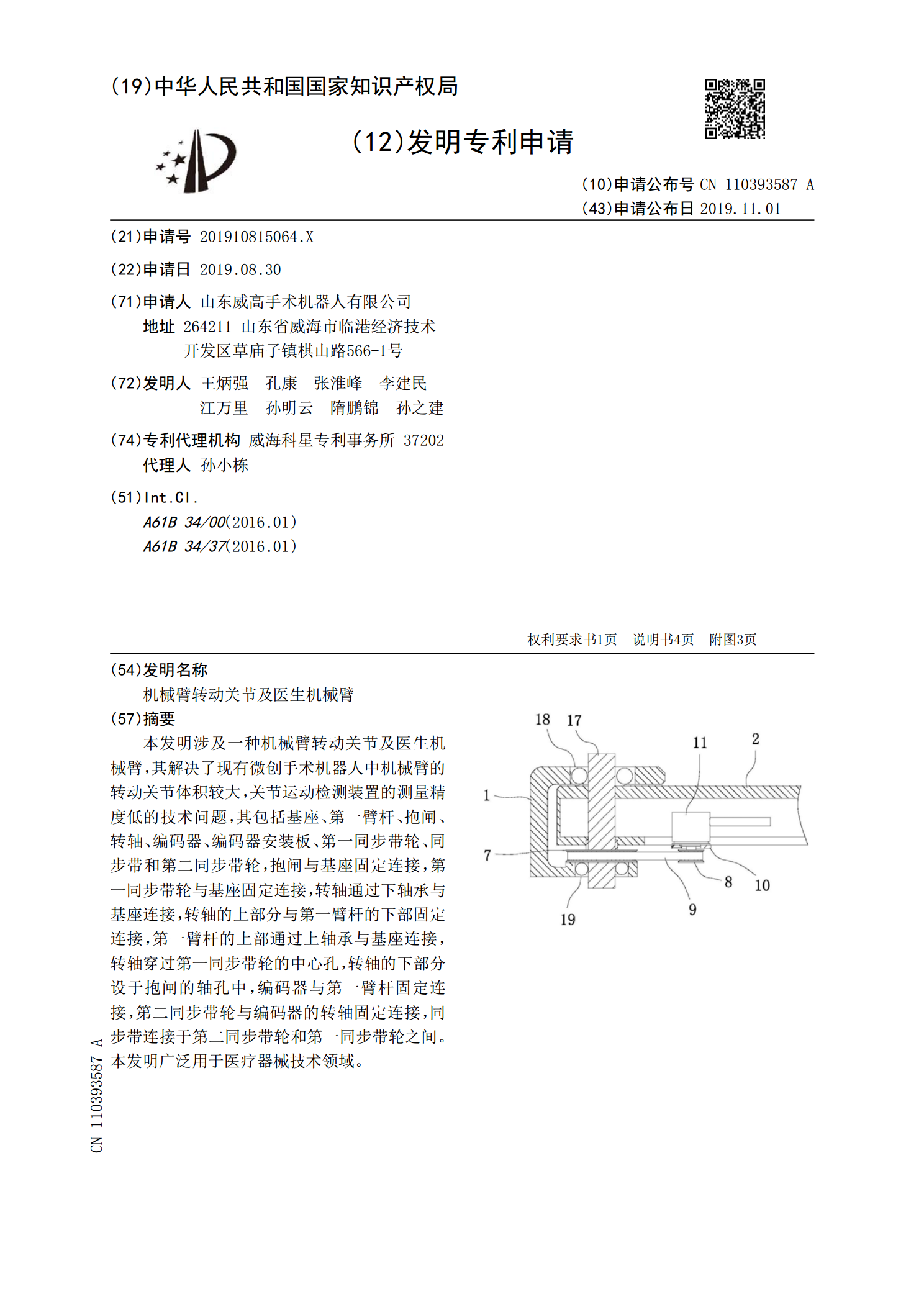
本发明涉及一种机械臂转动关节及医生机械臂,其解决了现有微创手术机器人中机械臂的转动关节体积较大,关节运动检测装置的测量精度低的技术问题,其包括基座、第一臂杆、抱闸、转轴、编码器、编码器安装板、第一同步带轮、同步带和第二同步带轮,抱闸与基座固定连接,第一同步带轮与基座固定连接,转轴通过下轴承与基座连接,转轴的上部分与第一臂杆的下部固定连接,第一臂杆的上部通过上轴承与基座连接,转轴穿过第一同步带轮的中心孔,转轴的下部分设于抱闸的轴孔中,编码器与第一臂杆固定连接,第二同步带轮与编码器的转轴固定连接,同步带连接于
一种转动关节机械臂重力补偿机构.pdf
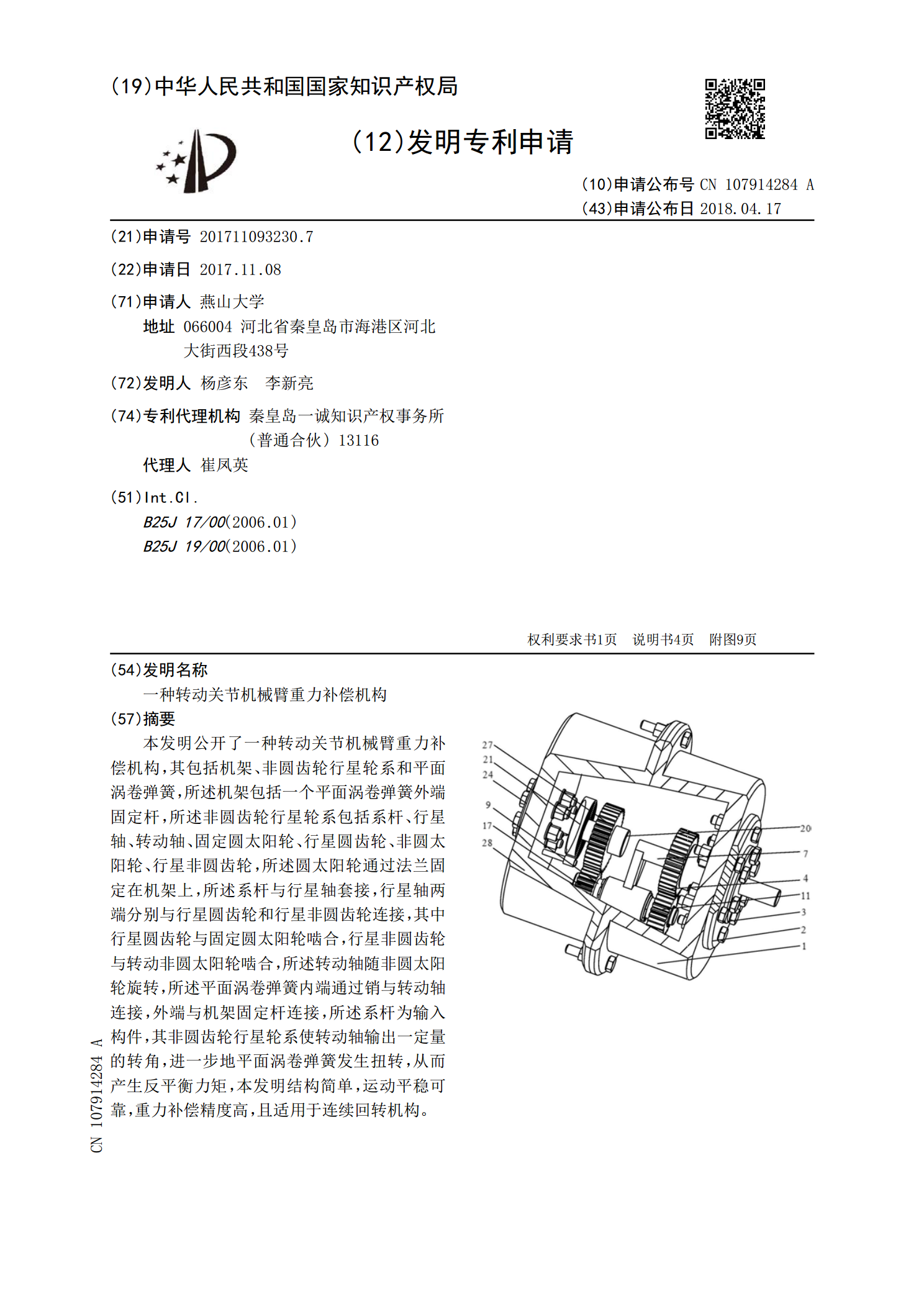
本发明公开了一种转动关节机械臂重力补偿机构,其包括机架、非圆齿轮行星轮系和平面涡卷弹簧,所述机架包括一个平面涡卷弹簧外端固定杆,所述非圆齿轮行星轮系包括系杆、行星轴、转动轴、固定圆太阳轮、行星圆齿轮、非圆太阳轮、行星非圆齿轮,所述圆太阳轮通过法兰固定在机架上,所述系杆与行星轴套接,行星轴两端分别与行星圆齿轮和行星非圆齿轮连接,其中行星圆齿轮与固定圆太阳轮啮合,行星非圆齿轮与转动非圆太阳轮啮合,所述转动轴随非圆太阳轮旋转,所述平面涡卷弹簧内端通过销与转动轴连接,外端与机架固定杆连接,所述系杆为输入构件,其非

一种绳驱动机械臂的传动绳预紧装置.pdf
本发明涉及绳驱动机器人领域。目的是提供一种绳驱动机械臂的传动绳预紧装置,该装置应具有结构简单、调节方便、可靠性好的特点。技术方案是:一种绳驱动机械臂的传动绳预紧装置,其特征在于:该装置包括固定在基板上的预紧块安装板、可转动地定位在预紧块安装板上的第一导向轮、可滑动地定位在预紧块安装板上的预紧块、可转动地定位在预紧块上的第二导向轮、用于推动预紧块沿着预紧块安装板表面移动的调节机构;所述调节机构包括固定在预紧块安装板上的连接块、设置在预紧块上的调节孔、可转动地定位在连接块上并与调节孔螺纹啮合的调节螺栓。

一种欠驱动多关节机械臂.pdf
本发明公开了一种欠驱动多关节机械臂,包括依次相连的基座和至少三节机械臂,基座上设有摩擦轮、传动轴、第一驱动电机以及第二驱动电机,摩擦轮和传动轴通过齿轮传动;除了最后两节以外,每节机械臂内均设有传动轴、摩擦轮和摩擦盘,其中摩擦轮均与该机械臂内传动轴通过齿轮传动,机械臂与机械臂之间以及机械臂与基座之间的传动轴均在连接处通过可伸缩双万向节相连,每节机械臂的摩擦盘与其前一节机械臂或基座的摩擦轮配合安装,摩擦盘通过皮带驱动其下节机械臂转动;倒数第二节机械臂内仅设有与其前一节机械臂内摩擦轮配合安装的摩擦盘,该摩擦盘通