
一种绳驱动摆转关节模块.pdf

一吃****昕靓

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳驱动摆转关节模块.pdf
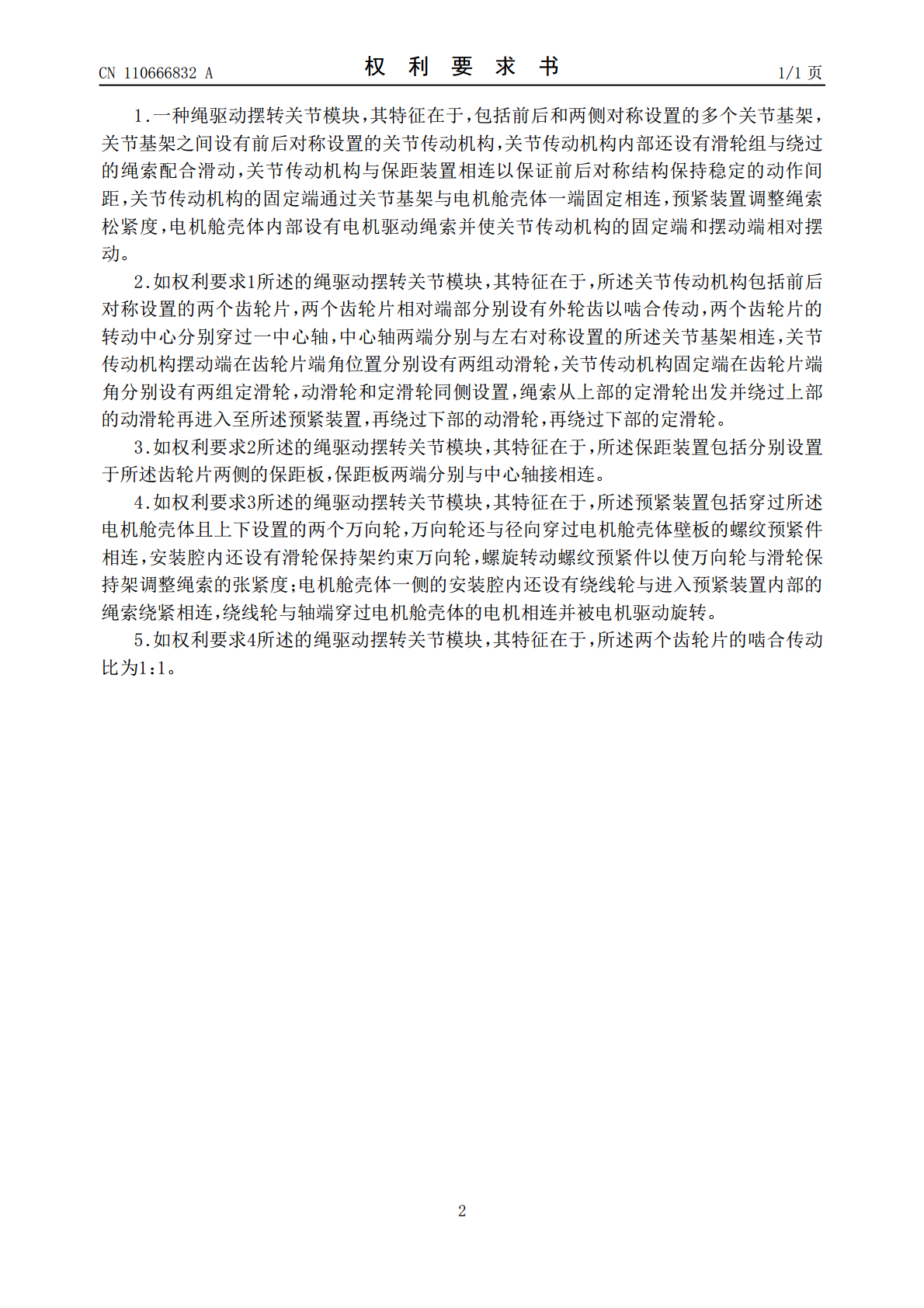
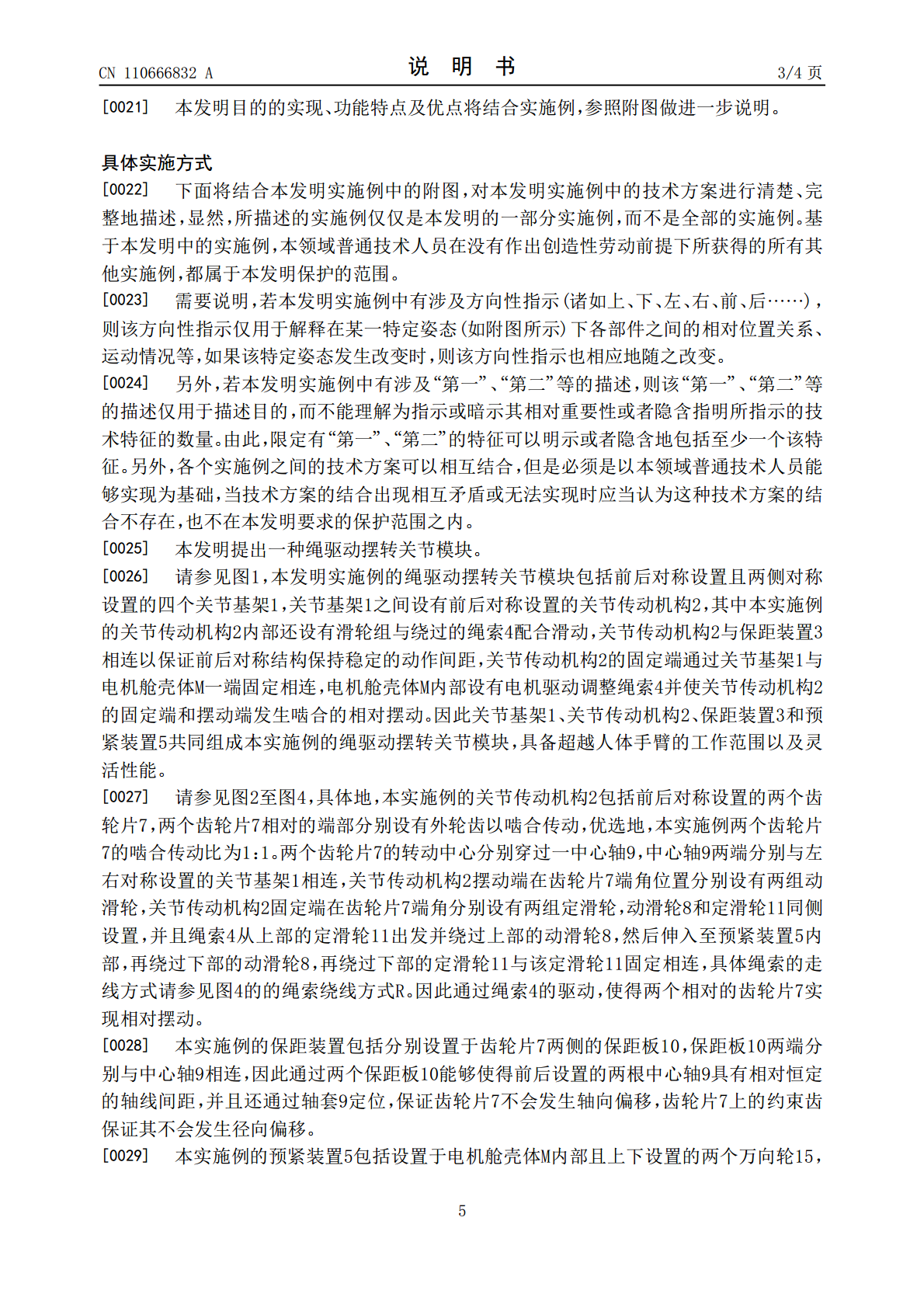
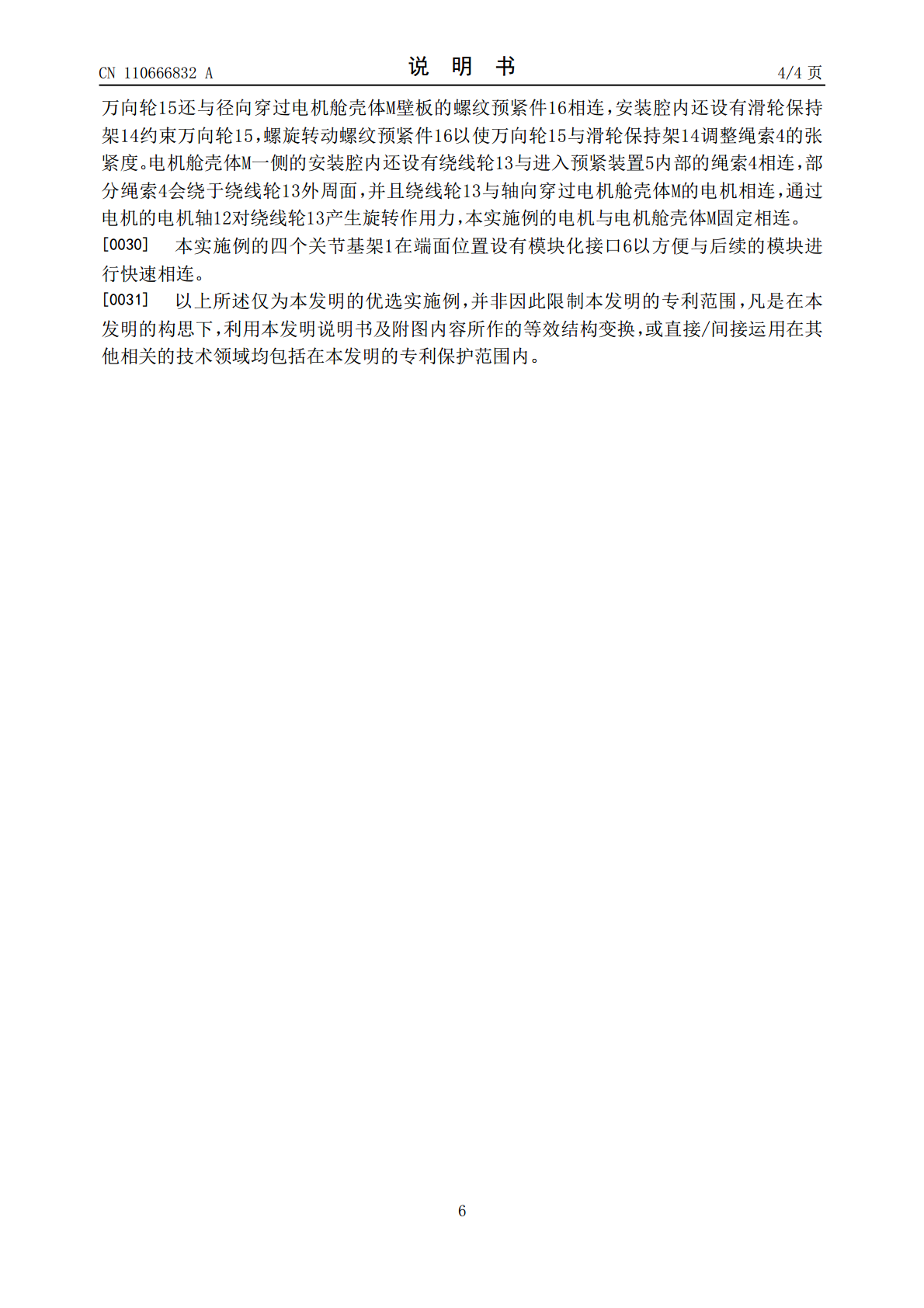
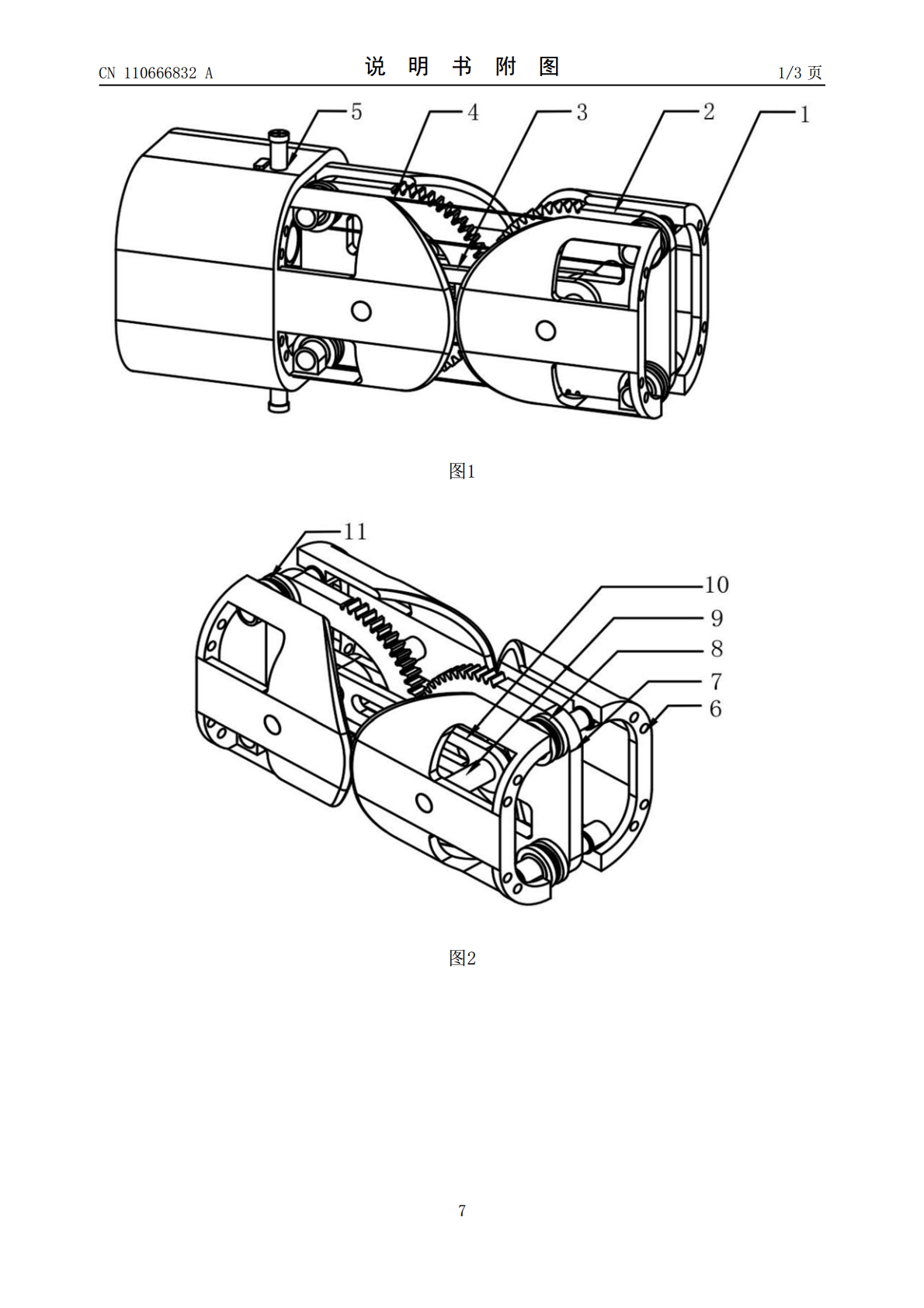
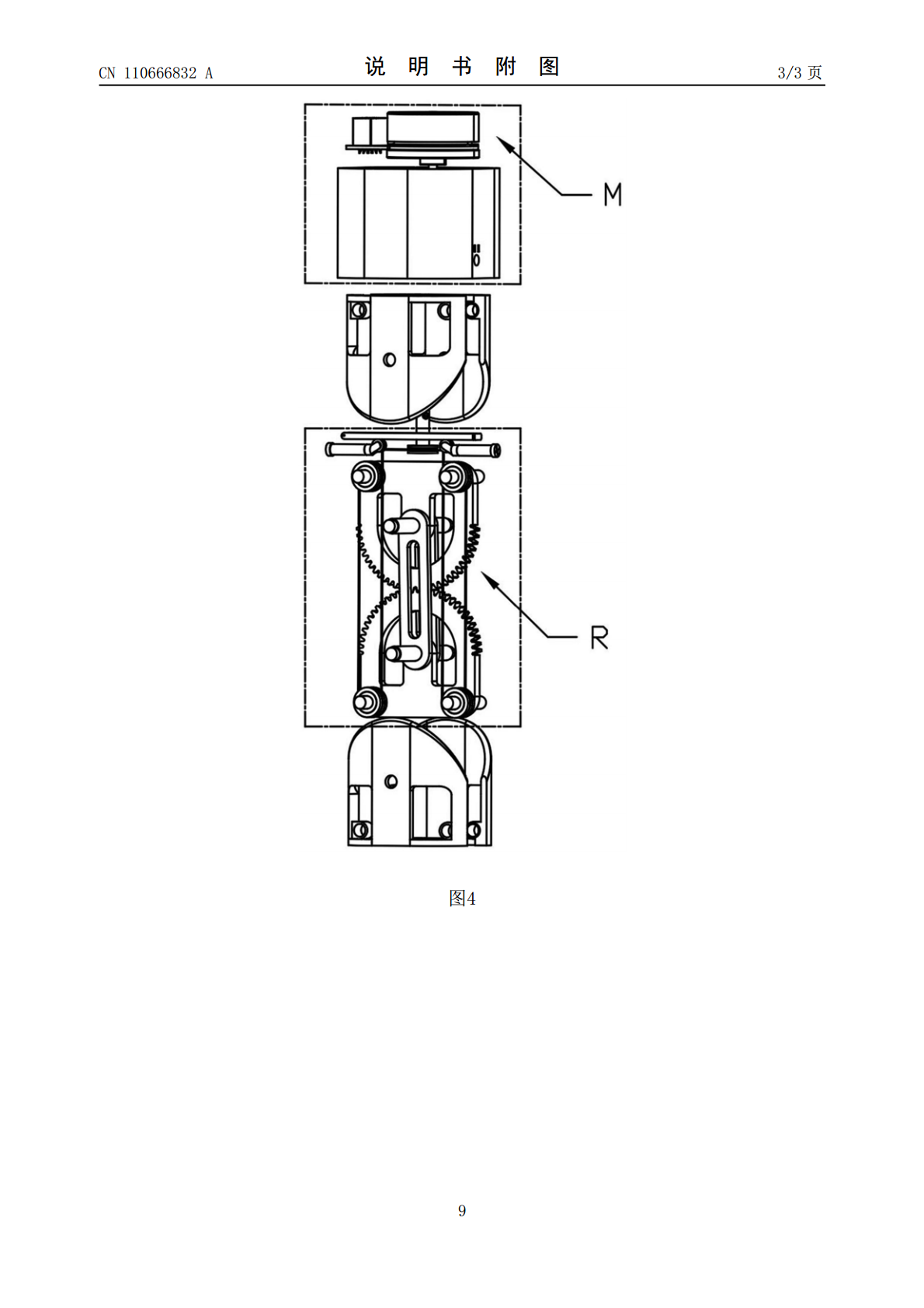
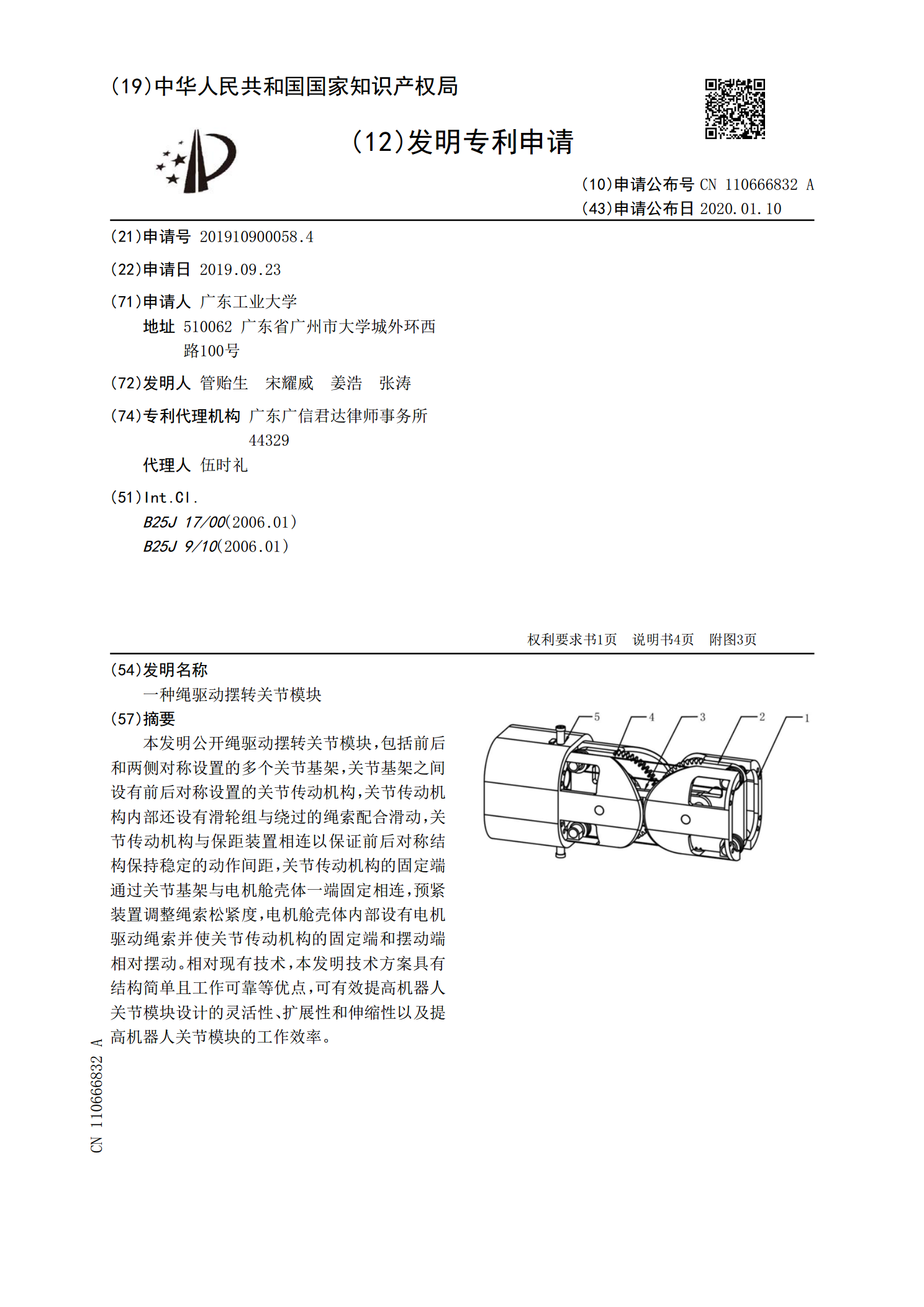
本发明公开绳驱动摆转关节模块,包括前后和两侧对称设置的多个关节基架,关节基架之间设有前后对称设置的关节传动机构,关节传动机构内部还设有滑轮组与绕过的绳索配合滑动,关节传动机构与保距装置相连以保证前后对称结构保持稳定的动作间距,关节传动机构的固定端通过关节基架与电机舱壳体一端固定相连,预紧装置调整绳索松紧度,电机舱壳体内部设有电机驱动绳索并使关节传动机构的固定端和摆动端相对摆动。相对现有技术,本发明技术方案具有结构简单且工作可靠等优点,可有效提高机器人关节模块设计的灵活性、扩展性和伸缩性以及提高机器人关节模

变刚度绳驱动关节模块研究的开题报告.docx
变刚度绳驱动关节模块研究的开题报告一、研究背景及意义随着机器人技术的不断发展,机器人应用领域也越来越广泛,而机器人关节模块是构成机器人的重要组成部分之一。对于机器人关节模块来说,驱动方式是重要的研究方向之一。比如目前广泛应用的的直流电机驱动和伺服电机驱动,但这两种驱动方式容易出现一些缺点,例如转动角度不精确、转速不稳定等问题。因此如何寻找更为有效的关节模块驱动方式成为一个重要的研究方向。在此,我们提出了一种基于变刚度绳驱动的关节模块研究。其主要原理为:通过改变悬挂关节模块的绳的刚度,进而控制关节模块转动角

一种绳驱动多关节机器人.pdf
本发明属于关节机器人领域,具体为一种绳驱动多关节机器人,解决了多关节的钢丝绳传动及布置的问题。该绳驱动多关节机器人分为手部、腕部、小臂、上臂、肩部、腰部及基座,基座上设置腰部,腰部通过曲轴组件与肩部连接,肩部通过旋转关节轴与上臂连接,上臂通过旋转关节轴上的从动轮组件Ⅱ与小臂连接,小臂通过旋转关节轴上的从动轮组件Ⅰ与腕部连接,腕部通过旋转关节轴与手部连接,相互连接的各个部分之间形成多个关节,多关节的绳传动单元通过柔绳分别与腰部、肩部、上臂、小臂、腕部、手部之一或两个以上连接,形成绳驱动多关节机器人。本发明机
一种绳驱动机械臂转动关节的结构.pdf
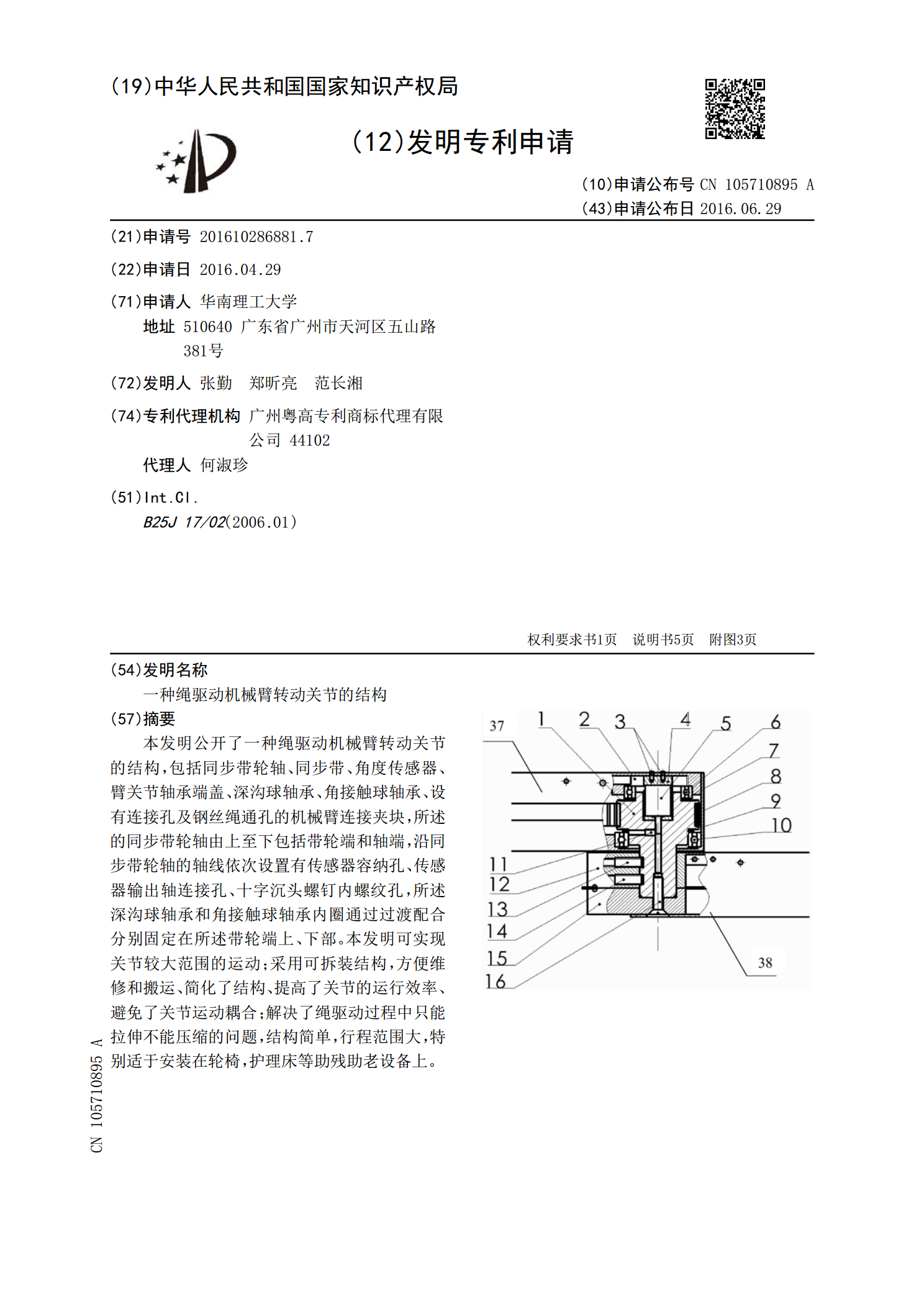
本发明公开了一种绳驱动机械臂转动关节的结构,包括同步带轮轴、同步带、角度传感器、臂关节轴承端盖、深沟球轴承、角接触球轴承、设有连接孔及钢丝绳通孔的机械臂连接夹块,所述的同步带轮轴由上至下包括带轮端和轴端,沿同步带轮轴的轴线依次设置有传感器容纳孔、传感器输出轴连接孔、十字沉头螺钉内螺纹孔,所述深沟球轴承和角接触球轴承内圈通过过渡配合分别固定在所述带轮端上、下部。本发明可实现关节较大范围的运动;采用可拆装结构,方便维修和搬运、简化了结构、提高了关节的运行效率、避免了关节运动耦合;解决了绳驱动过程中只能拉伸不能
一种绳驱动三自由度偏置关节.pdf
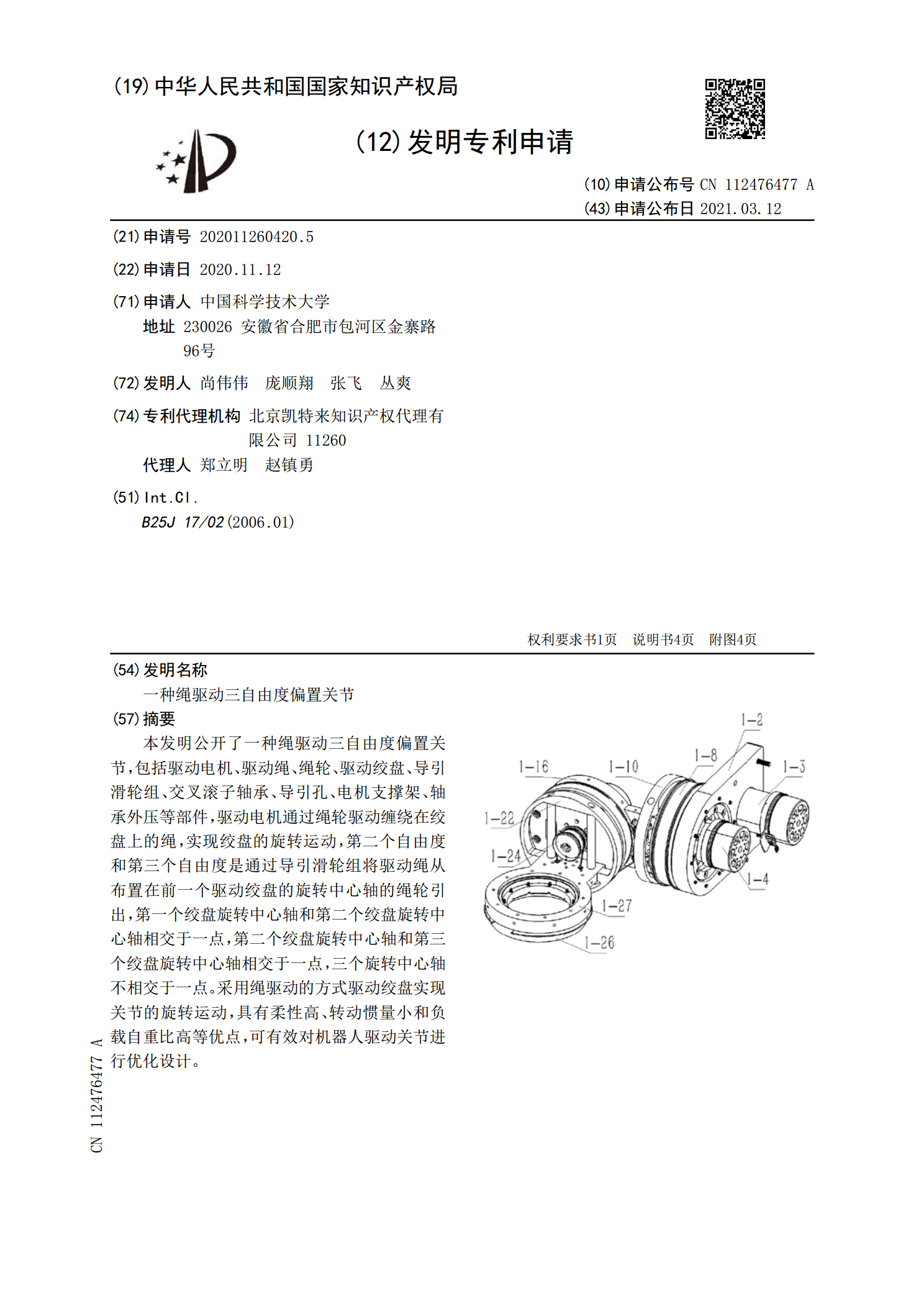
本发明公开了一种绳驱动三自由度偏置关节,包括驱动电机、驱动绳、绳轮、驱动绞盘、导引滑轮组、交叉滚子轴承、导引孔、电机支撑架、轴承外压等部件,驱动电机通过绳轮驱动缠绕在绞盘上的绳,实现绞盘的旋转运动,第二个自由度和第三个自由度是通过导引滑轮组将驱动绳从布置在前一个驱动绞盘的旋转中心轴的绳轮引出,第一个绞盘旋转中心轴和第二个绞盘旋转中心轴相交于一点,第二个绞盘旋转中心轴和第三个绞盘旋转中心轴相交于一点,三个旋转中心轴不相交于一点。采用绳驱动的方式驱动绞盘实现关节的旋转运动,具有柔性高、转动惯量小和负载自重比高