
地下铲运机自主行驶与避障控制方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

地下铲运机自主行驶与避障控制方法研究.docx
地下铲运机自主行驶与避障控制方法研究地下铲运机自主行驶与避障控制方法研究随着工业和矿业的发展,地下开采的需求越来越大。地下铲运机作为地下开采的必要工具,其自主行驶和避障控制方法的研究具有重要意义。本文将首先介绍地下铲运机的自主行驶技术,然后分析避障控制的关键技术和方法,并对其进行研究。一、地下铲运机的自主行驶技术地下铲运机自主行驶技术是指使用传感器等设备,将地下铲运机变为具有自主行驶功能的无人车辆,实现对其自身的协同、定位与导航等智能控制。在这些技术中,定位和导航是最基本的控制任务之一,同时,精确定位支持

适用于小型智能车的行驶路况评价及自主避障控制研究的任务书.docx
适用于小型智能车的行驶路况评价及自主避障控制研究的任务书任务书一、任务来源近年来,智能车技术得到了大力发展,成为无人驾驶和智慧交通的重要组成部分。小型智能车的研究和开发是智能交通系统建设的重要环节。因此,对小型智能车的行驶路况评价及自主避障控制研究具有重要的实践意义。二、任务内容1.小型智能车行驶路况评价研究:通过对小型智能车行驶过程中各种路况的数据记录和分析,综合评价不同路段、不同车速等情况下车辆的行驶稳定性、危险程度等指标,为后续的自主避障控制研究提供数据基础。2.小型智能车自主避障控制研究:结合行驶

车辆避障驾驶控制方法研究.docx
车辆避障驾驶控制方法研究车辆避障驾驶控制方法研究随着人类社会的不断发展,车辆成为人们日常生活与工作中不可或缺的一部分。但是,车辆行驶过程中难以避免遇到各种各样的障碍物,如行人、车辆、路障、建筑物等,这些障碍物可能会对车辆和驾驶员造成危险。为了提高车辆行驶的安全性和自主性,车辆避障驾驶控制方法成为了当前的热点研究领域。本文将探讨车辆避障驾驶控制方法的相关研究。一、车辆避障驾驶控制方法的分类1.基于传统控制方法的避障控制方法这种方法基于传统的控制方法,如PID控制,将传感器获取到的路面和障碍物信息进行处理,并
行驶装置的避障路径的规划方法和装置.pdf
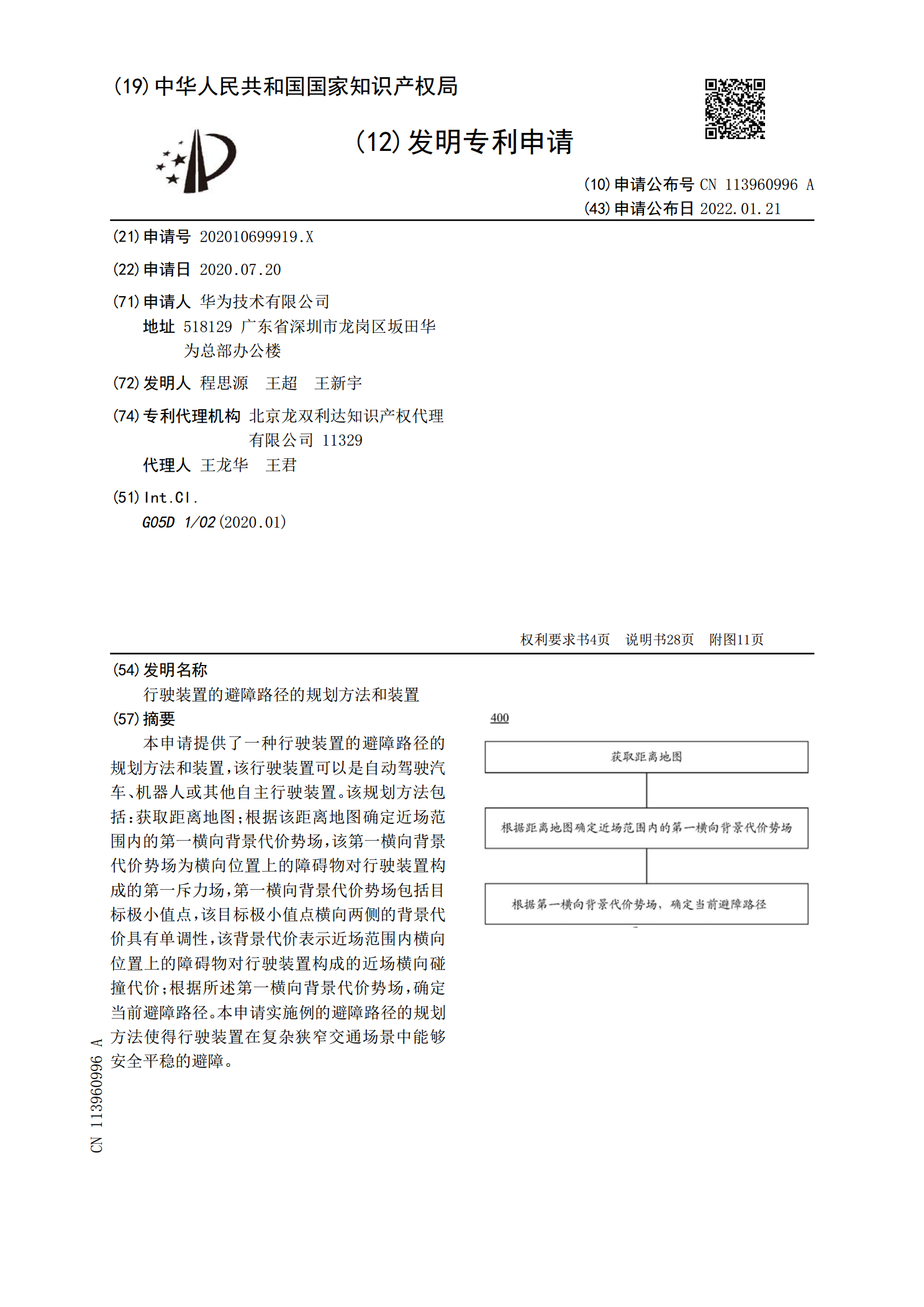
本申请提供了一种行驶装置的避障路径的规划方法和装置,该行驶装置可以是自动驾驶汽车、机器人或其他自主行驶装置。该规划方法包括:获取距离地图;根据该距离地图确定近场范围内的第一横向背景代价势场,该第一横向背景代价势场为横向位置上的障碍物对行驶装置构成的第一斥力场,第一横向背景代价势场包括目标极小值点,该目标极小值点横向两侧的背景代价具有单调性,该背景代价表示近场范围内横向位置上的障碍物对行驶装置构成的近场横向碰撞代价;根据所述第一横向背景代价势场,确定当前避障路径。本申请实施例的避障路径的规划方法使得行驶装置

自主避障代码.doc
intE1=5;intM1=4;intE2=6;intM2=7;intLightSensorPin=0;intLeftDistanceSensorPin=9;intRightDistanceSensorPin=8;intLEDPin=13;intspd=200;voidstop(void){analogWrite(E1,0);analogWrite(E2,0);}voidforward(chara,charb){analogWrite(E1,a);digitalWrite(M1,HIGH);analogW