
驱动轮总成及具有该驱动轮总成的机器人吸尘器.pdf

是来****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

驱动轮总成及具有该驱动轮总成的机器人吸尘器.pdf
本发明提供一种驱动轮总成及具有该驱动轮总成的机器人吸尘器。所述机器人吸尘器包括主体和驱动轮总成,所述驱动轮总成包括驱动轮、外壳、驱动电机、旋转构件和压缩螺旋弹簧,旋转构件围绕驱动电机的旋转轴旋转,其中,旋转构件包括第一单元和第二单元,第二单元设置在关于驱动电机的旋转轴与驱动轮相对的位置,压缩螺旋弹簧设置在外壳和第二单元之间,以将压力施加到第二单元,其中,压缩螺旋弹簧和第二单元接触的接触点与驱动电机的旋转轴之间的距离比驱动轮的旋转轴和驱动电机的旋转轴之间的距离短。
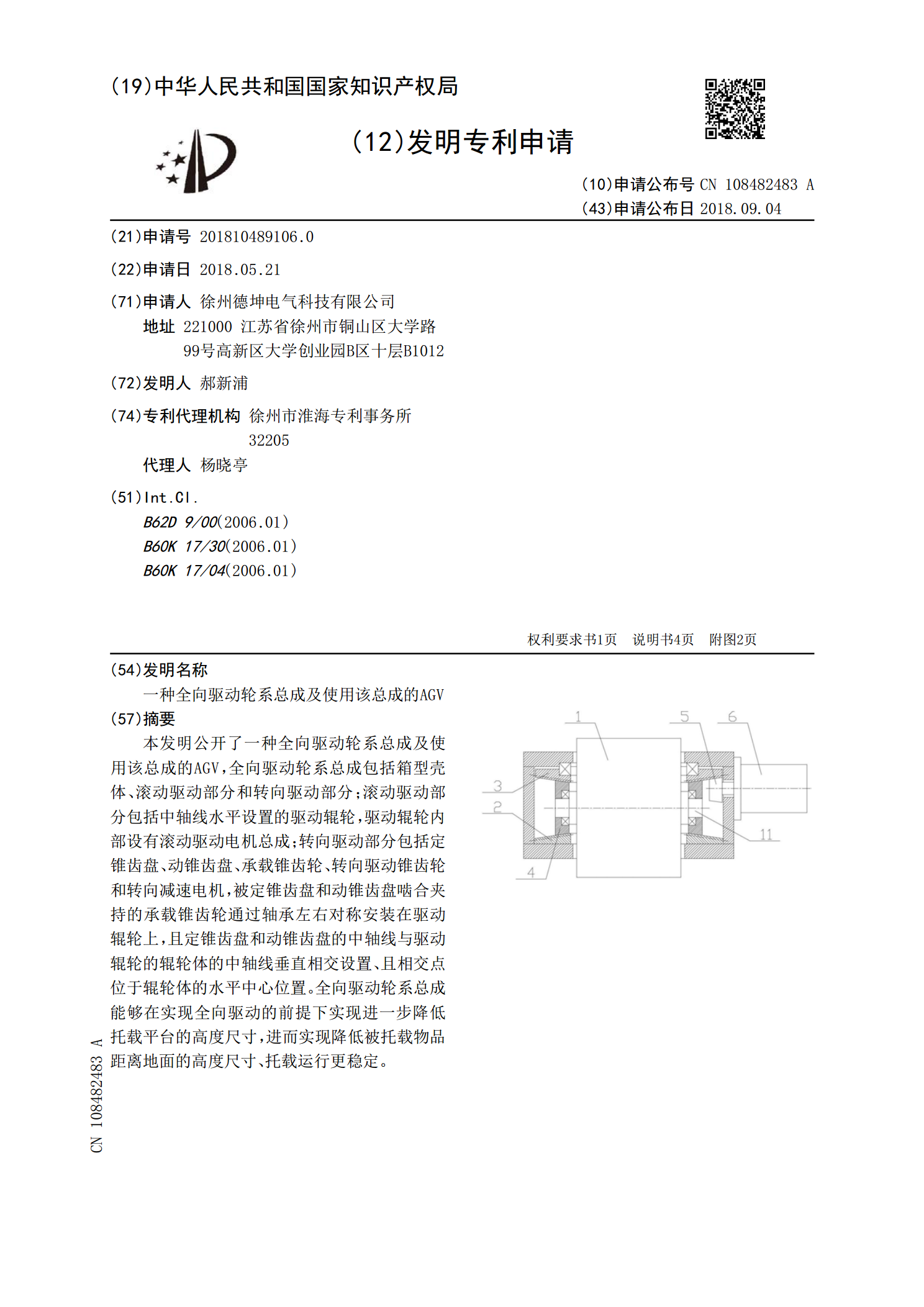
一种全向驱动轮系总成及使用该总成的AGV.pdf
本发明公开了一种全向驱动轮系总成及使用该总成的AGV,全向驱动轮系总成包括箱型壳体、滚动驱动部分和转向驱动部分;滚动驱动部分包括中轴线水平设置的驱动辊轮,驱动辊轮内部设有滚动驱动电机总成;转向驱动部分包括定锥齿盘、动锥齿盘、承载锥齿轮、转向驱动锥齿轮和转向减速电机,被定锥齿盘和动锥齿盘啮合夹持的承载锥齿轮通过轴承左右对称安装在驱动辊轮上,且定锥齿盘和动锥齿盘的中轴线与驱动辊轮的辊轮体的中轴线垂直相交设置、且相交点位于辊轮体的水平中心位置。全向驱动轮系总成能够在实现全向驱动的前提下实现进一步降低托载平台的高

位置可调的驱动轮总成.pdf
本发明涉及车辆技术领域,尤其涉及一种位置可调的驱动轮总成,包括驱动轮装配体、驱动轮调整机构、驱动轮动力传输装置。该总成用于履带行走系统,其驱动轮装配体的位置可调整,能够使驱动轮装配体在张紧履带的同时驱动履带。

带弹性驱动轮总成的清洁机器人.pdf
本发明公开了一种带弹性驱动轮总成的清洁机器人,包括机体和至少两组的驱动轮总成。机体包括相互扣接的上盖体和下盖体。驱动轮总成包括驱动臂、驱动轮、驱动源、减速部件。上盖体向下延伸出一固定构件,该固定构件设有一弧形管。弧形管内设有一弧形弹簧,该弧形管设有条形槽,该驱动臂向上延伸出一旋转构件,该旋转构件至少部分的伸入该条形槽内。驱动臂向上移动时,旋转构件在条形槽内滑动并挤压弧形弹簧。弧形弹簧作用在驱动臂和上盖体上,驱动轮可根据路面状况的变化小角度偏转。

一种驱动轮组件及具有该驱动轮组件的智能机器人.pdf
本发明公开了一种智能机器人,其特征在于,所述智能机器人包括:第一轮组、第二轮组、轮组切换机构;所述轮组切换机构用来升降切换第一轮组和第二轮组。本发明具有以下有益效果:提供使用横向和纵向两个方向运动的两组驱动轮系统,将各自的轮组的两对轮子进行刚性连接对机器进行直行驱动,使用轮组切换机构实现转弯的新型驱动方式,来满足不同功能型智能机器人的不同要求。