
一种驱动轮组件及具有该驱动轮组件的智能机器人.pdf

睿德****找我


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种驱动轮组件及具有该驱动轮组件的智能机器人.pdf
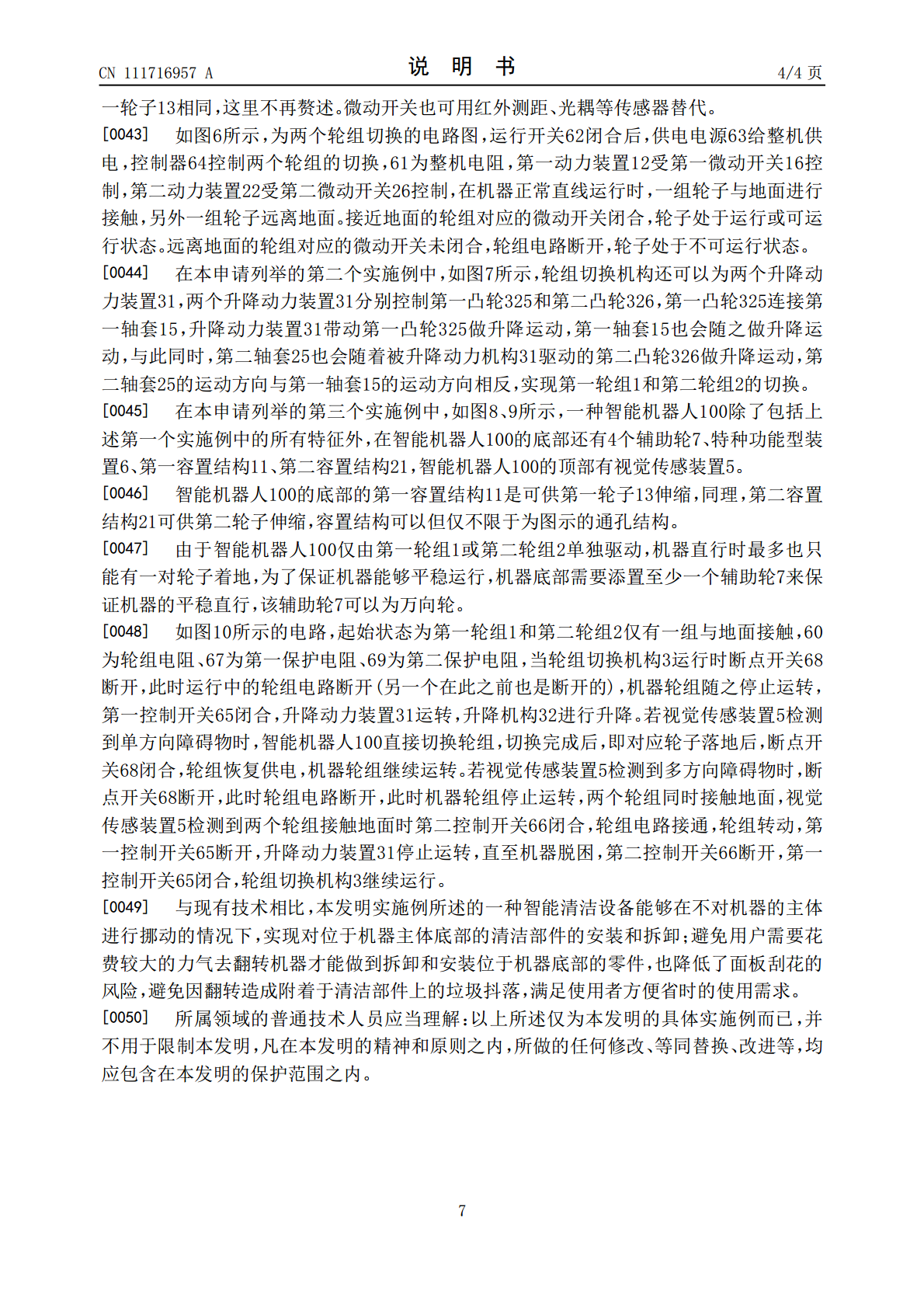
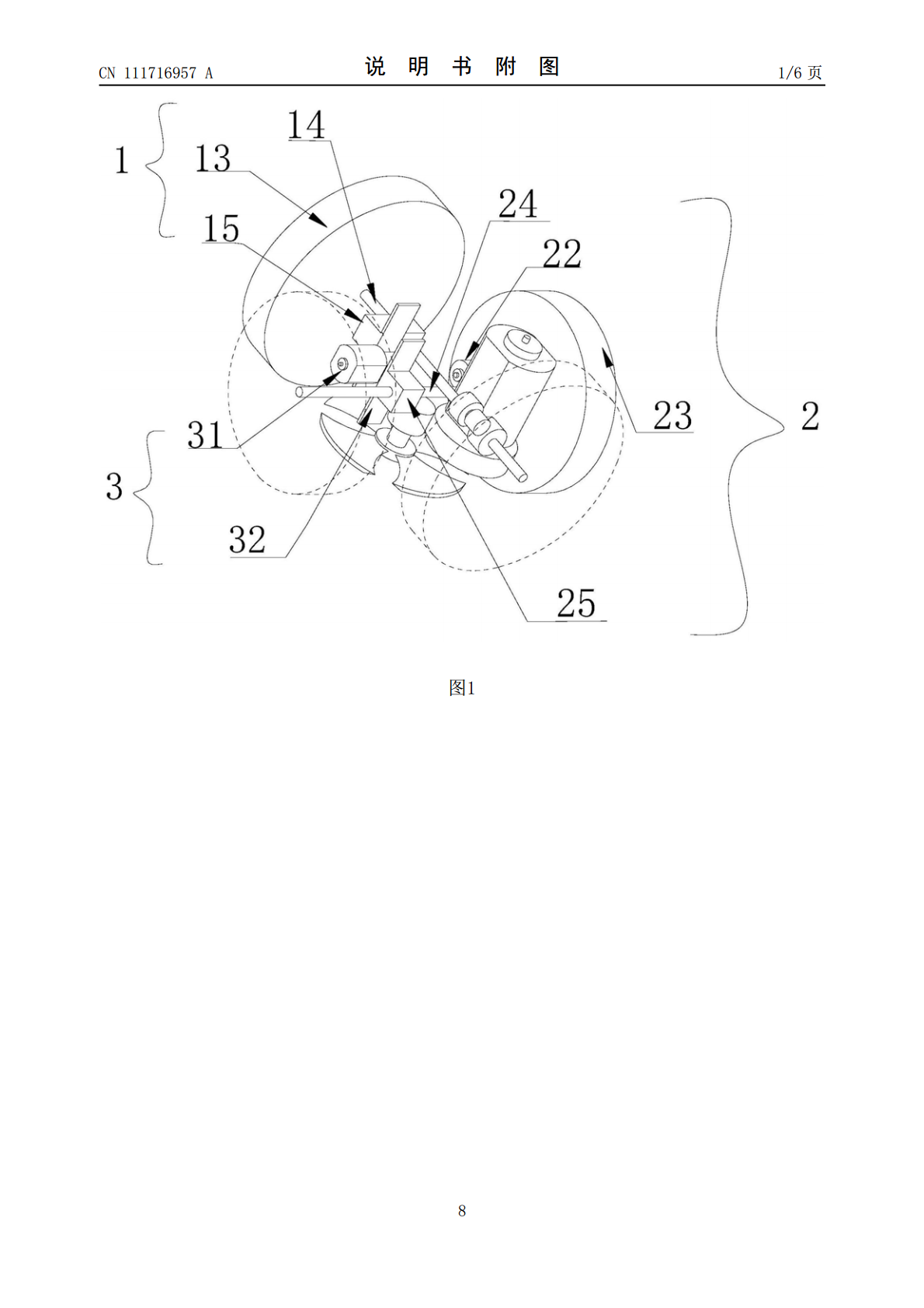
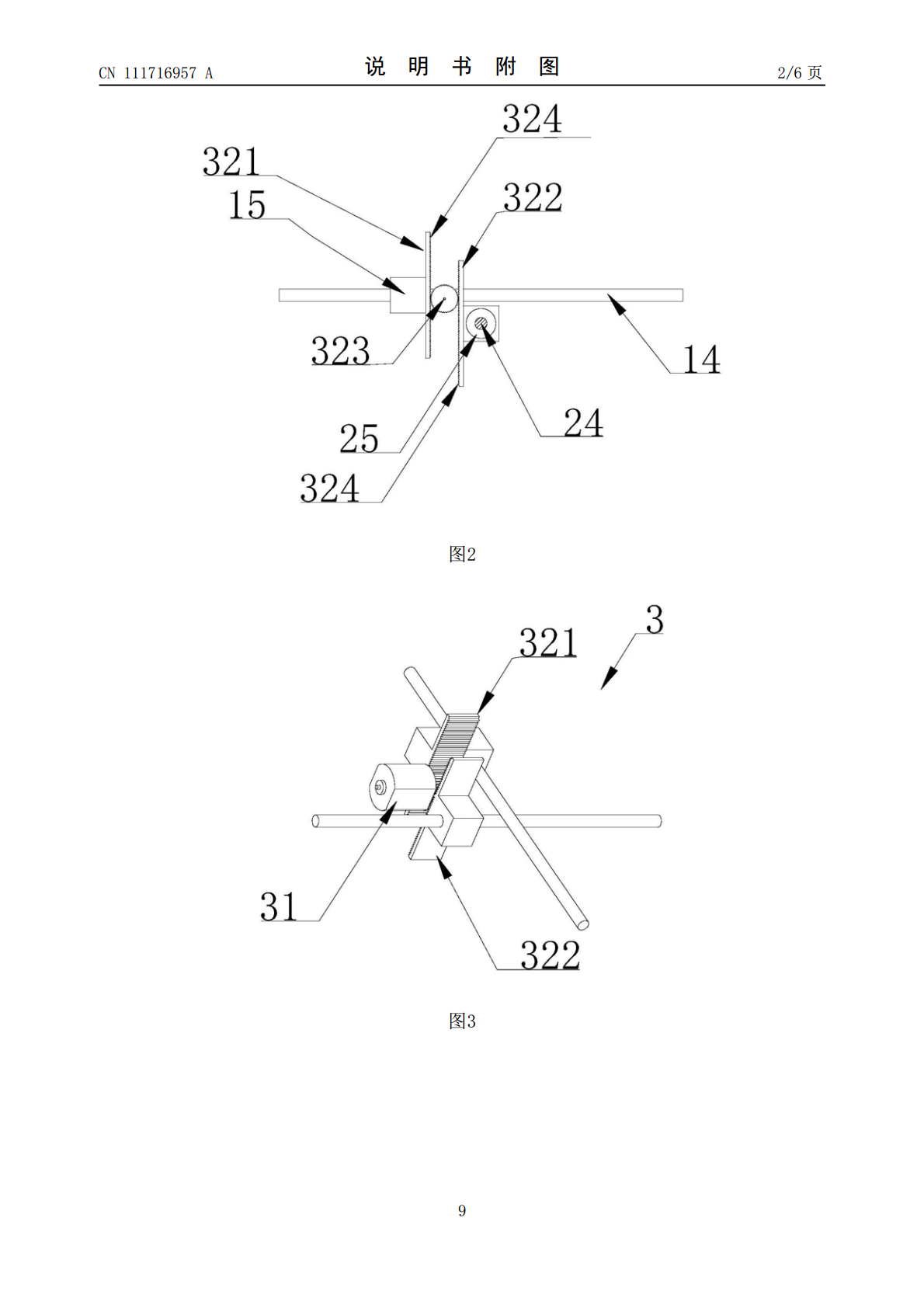
本发明公开了一种智能机器人,其特征在于,所述智能机器人包括:第一轮组、第二轮组、轮组切换机构;所述轮组切换机构用来升降切换第一轮组和第二轮组。本发明具有以下有益效果:提供使用横向和纵向两个方向运动的两组驱动轮系统,将各自的轮组的两对轮子进行刚性连接对机器进行直行驱动,使用轮组切换机构实现转弯的新型驱动方式,来满足不同功能型智能机器人的不同要求。

一种驱动轮组件及其机器人.pdf
本发明实施例公开一种结构紧凑、尺寸空间小的驱动轮组件,该驱动轮组件包括驱动轮,与驱动轮连接且用于驱动的驱动电机,用于安装和容纳驱动电机的电机座,将驱动轮组件安装至机器人上预设位置的安装座,用于连接安装座和电机座的导向轴,与导向轴配合的轴承,以及在轴承的外围套设的弹性件。轴承上套设的弹性件在不同的工况下,能够提供不同的弹性力,可通过合理地选择弹性件的刚度及行程,有效地调节驱动轮组件的越障能力,以及越障时的平稳性。本发明实施例还公开了安装有上述驱动轮组件的机器人,该机器人具有良好的越障性能。
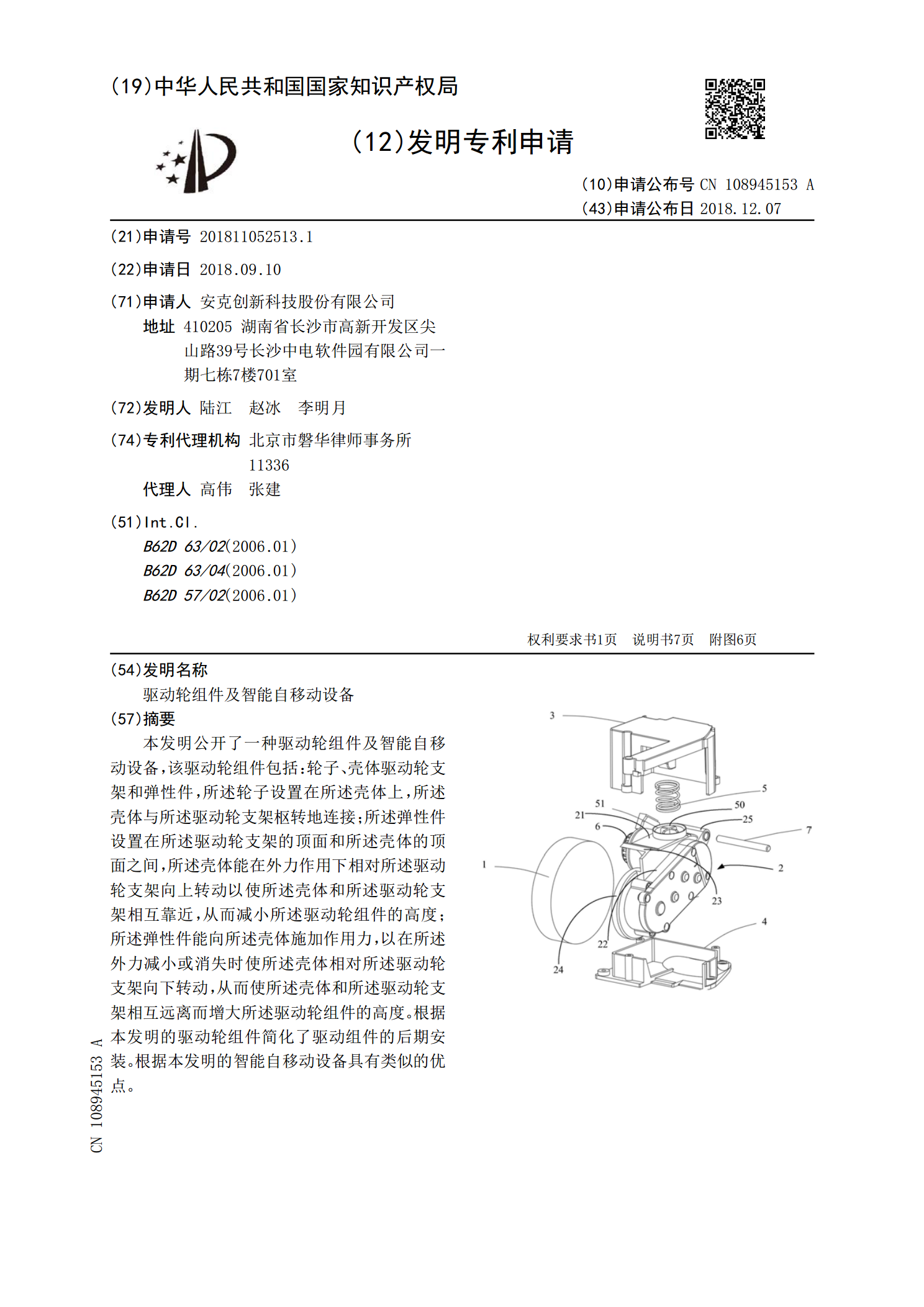
驱动轮组件及智能自移动设备.pdf
本发明公开了一种驱动轮组件及智能自移动设备,该驱动轮组件包括:轮子、壳体驱动轮支架和弹性件,所述轮子设置在所述壳体上,所述壳体与所述驱动轮支架枢转地连接;所述弹性件设置在所述驱动轮支架的顶面和所述壳体的顶面之间,所述壳体能在外力作用下相对所述驱动轮支架向上转动以使所述壳体和所述驱动轮支架相互靠近,从而减小所述驱动轮组件的高度;所述弹性件能向所述壳体施加作用力,以在所述外力减小或消失时使所述壳体相对所述驱动轮支架向下转动,从而使所述壳体和所述驱动轮支架相互远离而增大所述驱动轮组件的高度。根据本发明的驱动轮组

驱动轮总成及具有该驱动轮总成的机器人吸尘器.pdf
本发明提供一种驱动轮总成及具有该驱动轮总成的机器人吸尘器。所述机器人吸尘器包括主体和驱动轮总成,所述驱动轮总成包括驱动轮、外壳、驱动电机、旋转构件和压缩螺旋弹簧,旋转构件围绕驱动电机的旋转轴旋转,其中,旋转构件包括第一单元和第二单元,第二单元设置在关于驱动电机的旋转轴与驱动轮相对的位置,压缩螺旋弹簧设置在外壳和第二单元之间,以将压力施加到第二单元,其中,压缩螺旋弹簧和第二单元接触的接触点与驱动电机的旋转轴之间的距离比驱动轮的旋转轴和驱动电机的旋转轴之间的距离短。

一种驱动轮用轮毂组件.pdf
一种驱动轮用轮毂组件,包括轮毂罩、轮毂外圈和刹车盘套件,所述的轮毂外圈呈圆柱形,中心设有安装轴承和油封的通孔,外圆面布置有若干个减重圆弧切口,所述切口上布置有轮毂压钉,轮毂外圈的大圆端面设有用于安装轮毂花键盘的配合面,轮毂花键盘的外端面安装有刹车盘套件,轮毂花键盘中心的花键用来连接动力输出半轴,轮毂外圈的中间小圆端面设有用于安装轮毂罩的螺纹孔。本发明的有益效果是:结构简单又重量轻,轮毂轴承维护方便,设计很灵活,同时外形美观,特别适合用在最求高性能的巴吉赛车驱动桥上。