
一种全向驱动轮系总成及使用该总成的AGV.pdf

康佳****文库

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全向驱动轮系总成及使用该总成的AGV.pdf
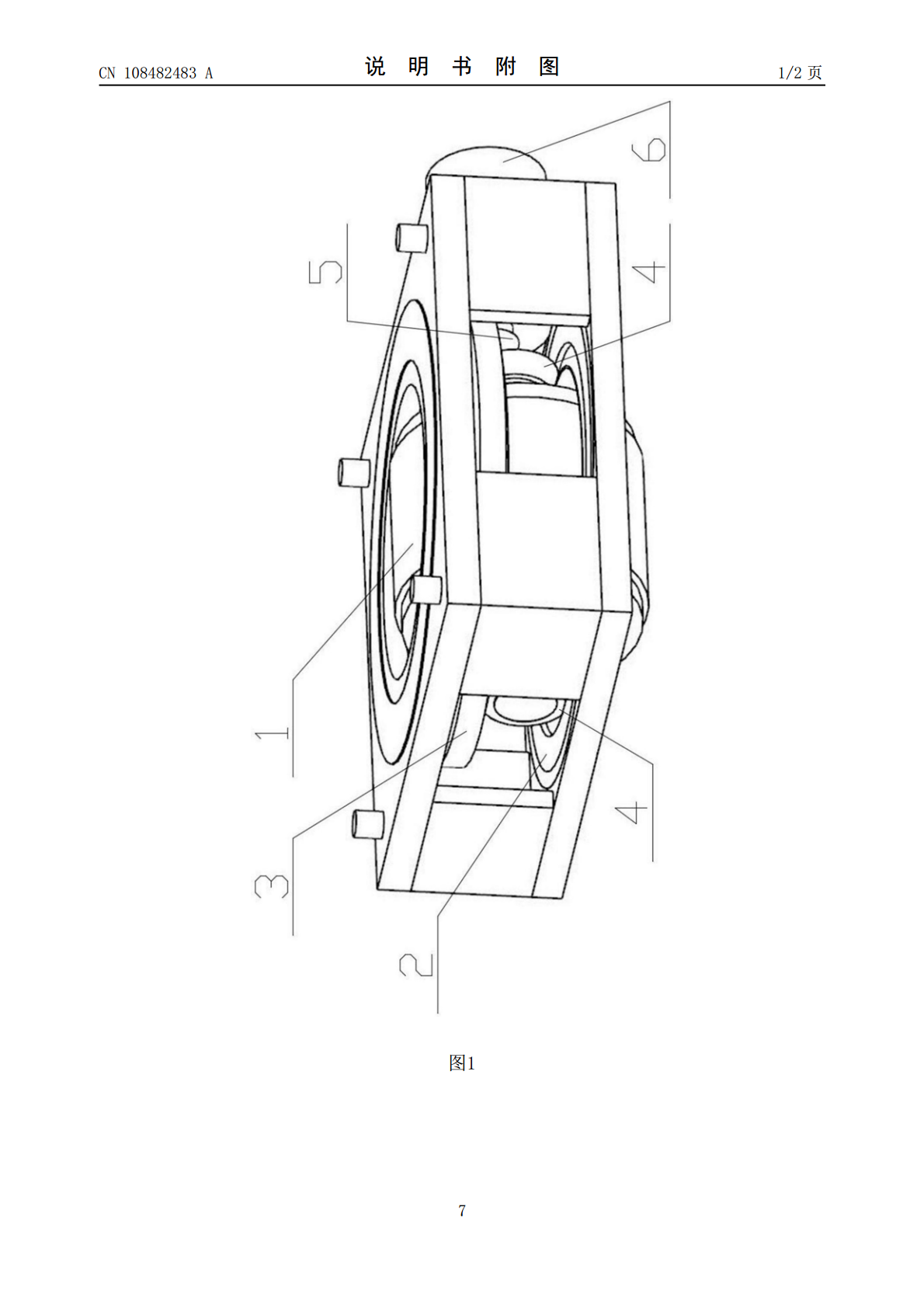
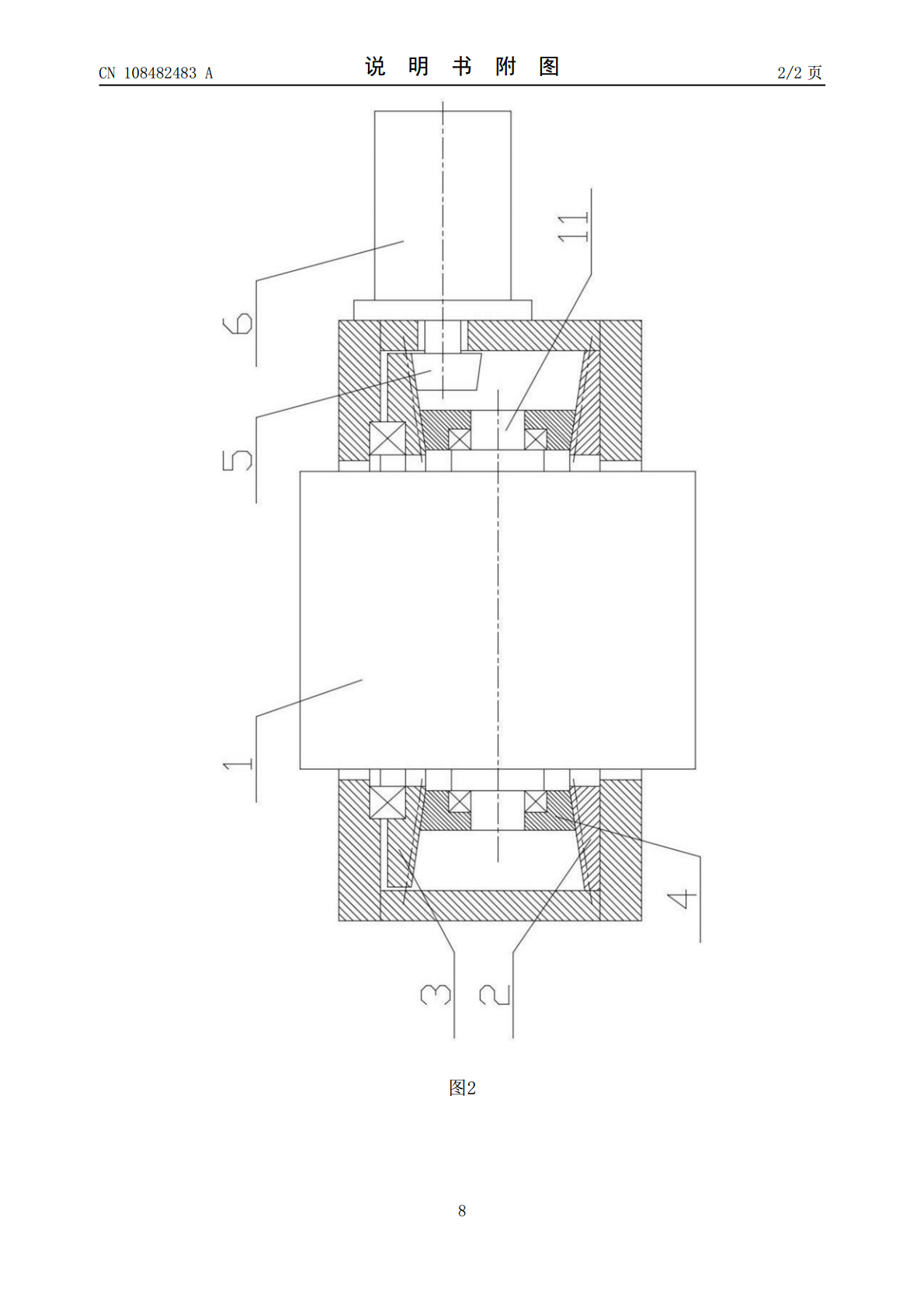
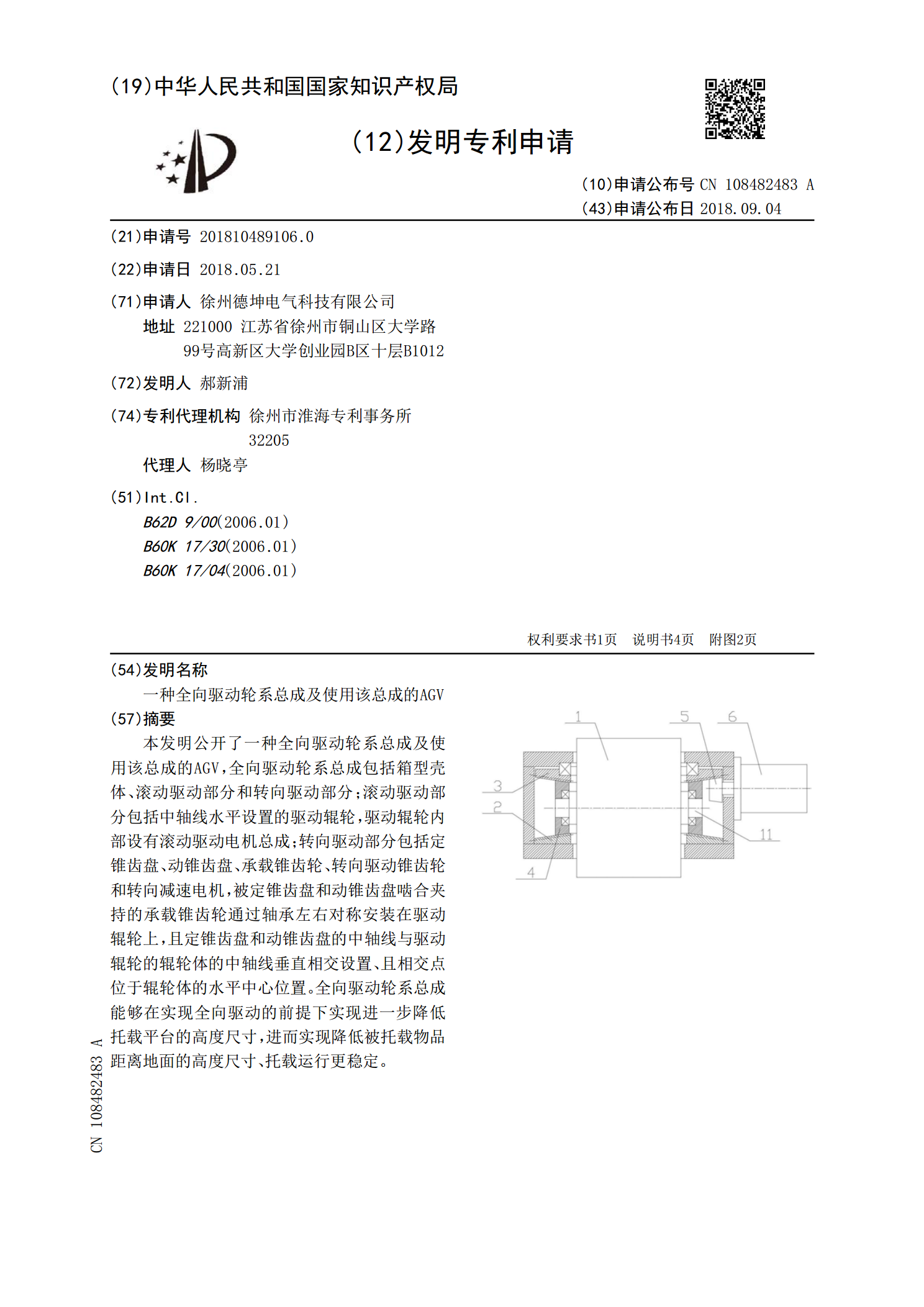
本发明公开了一种全向驱动轮系总成及使用该总成的AGV,全向驱动轮系总成包括箱型壳体、滚动驱动部分和转向驱动部分;滚动驱动部分包括中轴线水平设置的驱动辊轮,驱动辊轮内部设有滚动驱动电机总成;转向驱动部分包括定锥齿盘、动锥齿盘、承载锥齿轮、转向驱动锥齿轮和转向减速电机,被定锥齿盘和动锥齿盘啮合夹持的承载锥齿轮通过轴承左右对称安装在驱动辊轮上,且定锥齿盘和动锥齿盘的中轴线与驱动辊轮的辊轮体的中轴线垂直相交设置、且相交点位于辊轮体的水平中心位置。全向驱动轮系总成能够在实现全向驱动的前提下实现进一步降低托载平台的高
一种全向驱动轮系总成的控制方法.pdf
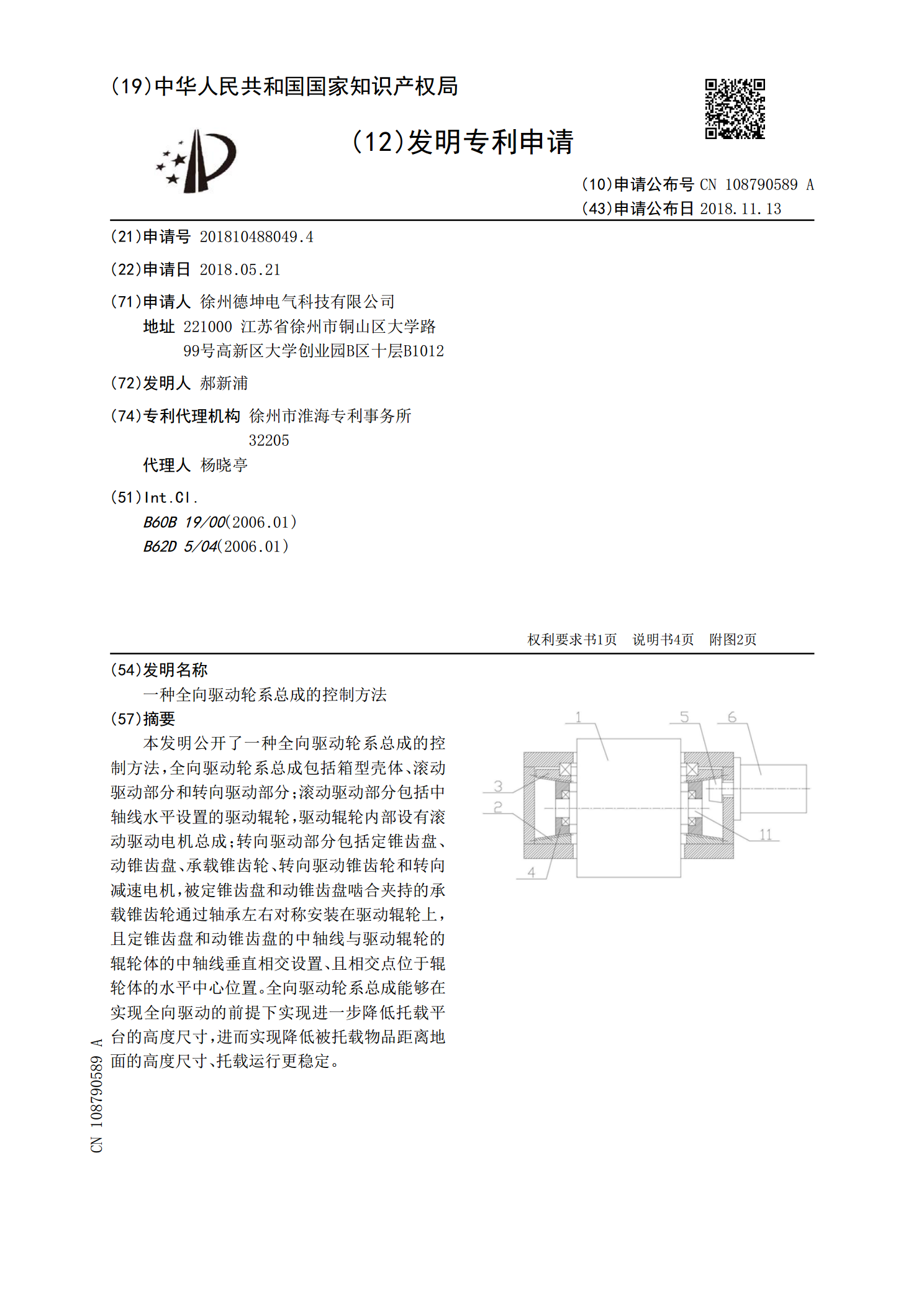
本发明公开了一种全向驱动轮系总成的控制方法,全向驱动轮系总成包括箱型壳体、滚动驱动部分和转向驱动部分;滚动驱动部分包括中轴线水平设置的驱动辊轮,驱动辊轮内部设有滚动驱动电机总成;转向驱动部分包括定锥齿盘、动锥齿盘、承载锥齿轮、转向驱动锥齿轮和转向减速电机,被定锥齿盘和动锥齿盘啮合夹持的承载锥齿轮通过轴承左右对称安装在驱动辊轮上,且定锥齿盘和动锥齿盘的中轴线与驱动辊轮的辊轮体的中轴线垂直相交设置、且相交点位于辊轮体的水平中心位置。全向驱动轮系总成能够在实现全向驱动的前提下实现进一步降低托载平台的高度尺寸,进

驱动轮总成及具有该驱动轮总成的机器人吸尘器.pdf
本发明提供一种驱动轮总成及具有该驱动轮总成的机器人吸尘器。所述机器人吸尘器包括主体和驱动轮总成,所述驱动轮总成包括驱动轮、外壳、驱动电机、旋转构件和压缩螺旋弹簧,旋转构件围绕驱动电机的旋转轴旋转,其中,旋转构件包括第一单元和第二单元,第二单元设置在关于驱动电机的旋转轴与驱动轮相对的位置,压缩螺旋弹簧设置在外壳和第二单元之间,以将压力施加到第二单元,其中,压缩螺旋弹簧和第二单元接触的接触点与驱动电机的旋转轴之间的距离比驱动轮的旋转轴和驱动电机的旋转轴之间的距离短。
高精度紧凑型AGV驱动轮总成.pdf
本发明涉及机械制造的技术领域,提供了一种高精度、紧凑型AGV驱动轮总成。现有的AGV驱动轮,多是以电机、减速器通过联接件,多级联接到轮体上,形成了产生累计误差的中间环节,也造成了轴向尺寸偏大的结构,降低了传动精度,提高了制造成本。本发明将应用于机器人技术的,结构紧凑、精度高的RV减速器,设置在驱动轮轮体的内部,以自带码盘、高精度的伺服电机直联减速器,实现轴向尺寸的零冗余,减少了传动链和轴向尺寸,从而避免了传动误差的累积,且提高了整体性和减少了零部件数量,同时因增加了驱动轮体踏面与地面间的摩擦力阻力,减少

一种AGV驱动总成.pdf
本实用新型涉及AGV技术领域,具体为一种AGV驱动总成,包括安装箱,所述安装箱的内部设置有电机,所述电机的输出端固定连接有转轴,所述转轴贯穿于安装箱的内部,所述转轴的内部开设有定位孔,所述定位孔的内部活动连接有定位杆,所述转轴的内部活动连接有丝杆。本实用新型的优点在于:通过设置定位杆,在转轴的内部开设有定位孔,定位杆活动连接于定位孔的内部,在使用时,移动轮子至转轴上,位于挡板的一侧,使用固定螺母转动至转轴上,对轮子进行固定,之后,通过转动丝杆,使推板推动连接板,推动定位杆,使定位杆穿过定位孔,移动至轮子的