
浅谈工业机器人的控制方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

浅谈工业机器人的控制方法.docx
浅谈工业机器人的控制方法工业机器人是现代制造业中极为常见的机械设备之一。利用机器人可以大幅提高生产效率,降低劳动力成本,并且可以提高产品的质量和精度。机器人技术的不断发展,为工业机器人的控制方法提供了更多的选择和优化方案。本文将就机器人控制方法进行探讨。1.手动编程控制法手动编程是最早期机器人控制方法之一,通常由人工编写机器人的任务程序,将指令逐步输入机器人控制器,实现机器人的动作。手动编程是一种比较传统的控制方法,适用于简单的工业操作任务。手动编程的缺点是需要熟练掌握机器人的三维空间坐标系和动作轨迹,需

浅谈工业机器人启停控制方法.docx
浅谈工业机器人启停控制方法工业机器人在现代制造业中扮演着重要的角色,能够提高生产效率、保障产品质量以及减少人力成本。工业机器人的启停控制方法对机器人的运行效果和操作安全具有至关重要的影响。本文将从机器人的基本启停控制方法、传统控制方法以及现代智能控制方法三个方面进行论述。一、工业机器人的基本启停控制方法工业机器人的基本启停控制方法是通过电气控制系统实现的。具体而言,工业机器人的控制系统包括主控制器、执行机构以及传感器三个主要部分。主控制器是机器人控制的核心组件,它接收操作者的指令,根据预设的程序进行计算和
工业用机器人和工业用机器人的控制方法.pdf
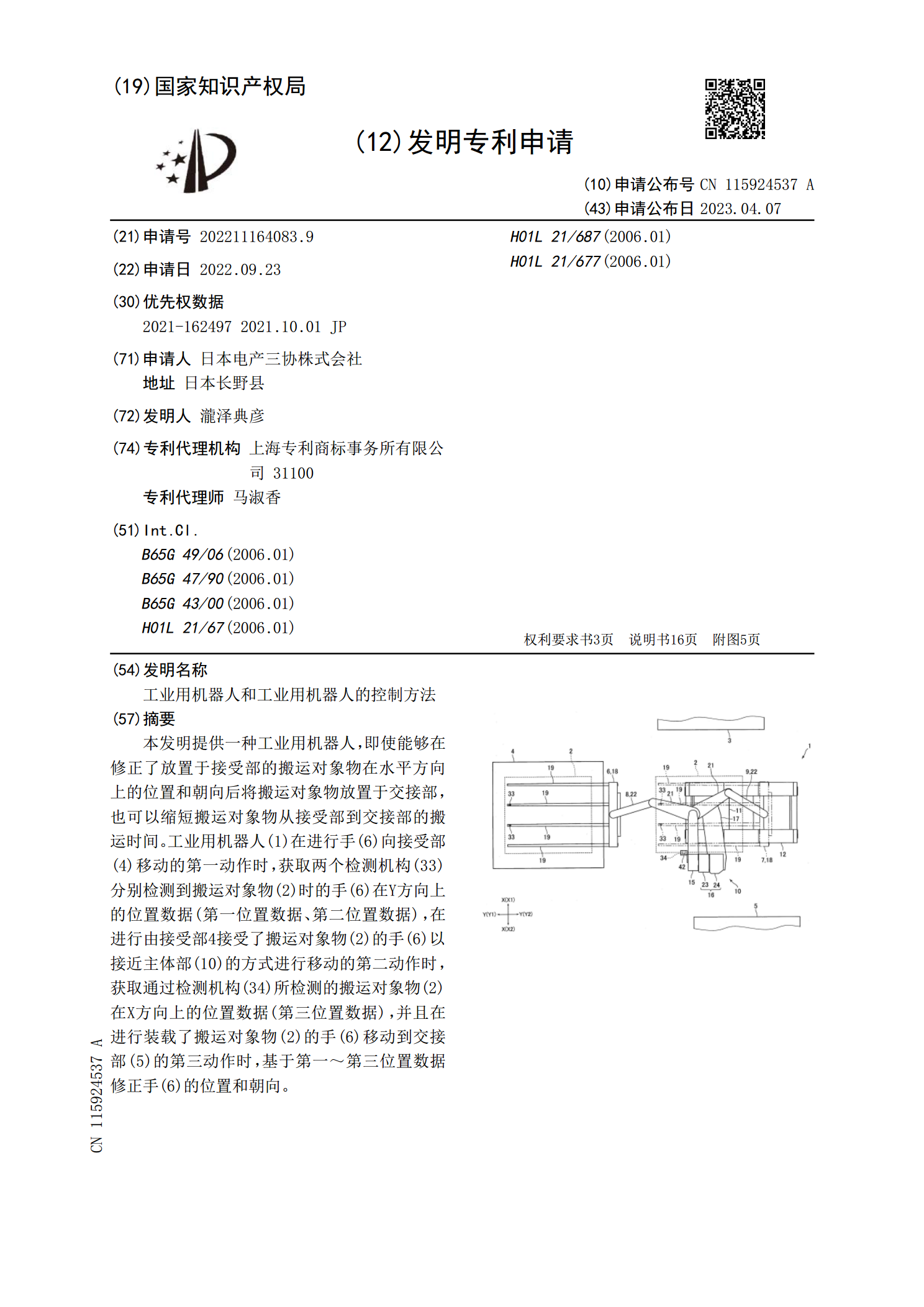
本发明提供一种工业用机器人,即使能够在修正了放置于接受部的搬运对象物在水平方向上的位置和朝向后将搬运对象物放置于交接部,也可以缩短搬运对象物从接受部到交接部的搬运时间。工业用机器人(1)在进行手(6)向接受部(4)移动的第一动作时,获取两个检测机构(33)分别检测到搬运对象物(2)时的手(6)在Y方向上的位置数据(第一位置数据、第二位置数据),在进行由接受部4接受了搬运对象物(2)的手(6)以接近主体部(10)的方式进行移动的第二动作时,获取通过检测机构(34)所检测的搬运对象物(2)在X方向上的位置数据
工业机器人的程序解析方法及工业机器人控制系统.pdf
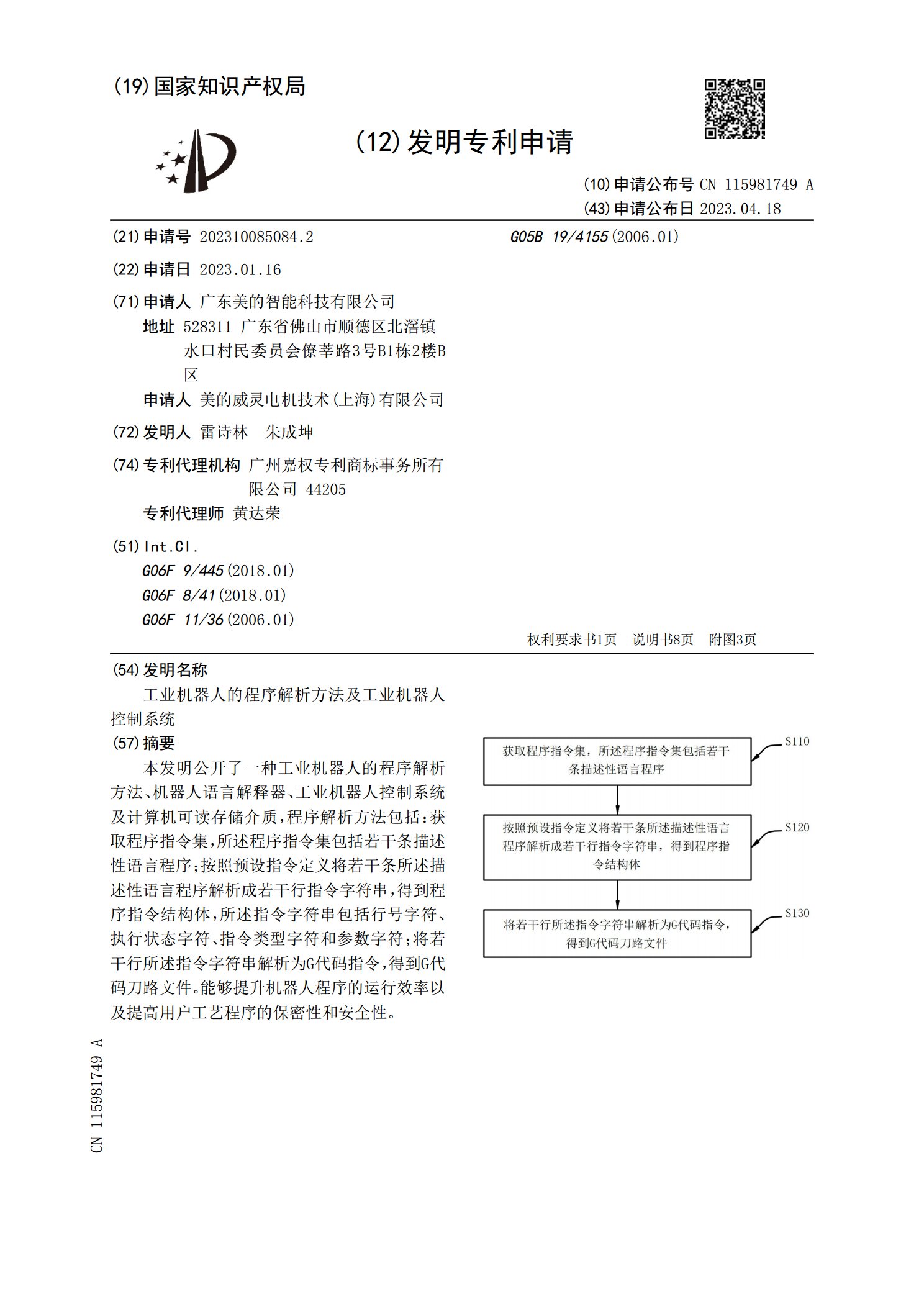
本发明公开了一种工业机器人的程序解析方法、机器人语言解释器、工业机器人控制系统及计算机可读存储介质,程序解析方法包括:获取程序指令集,所述程序指令集包括若干条描述性语言程序;按照预设指令定义将若干条所述描述性语言程序解析成若干行指令字符串,得到程序指令结构体,所述指令字符串包括行号字符、执行状态字符、指令类型字符和参数字符;将若干行所述指令字符串解析为G代码指令,得到G代码刀路文件。能够提升机器人程序的运行效率以及提高用户工艺程序的保密性和安全性。

工业机器人的常用控制方法.ppt
1、单自由度刚性控制2、机械手的阻抗控制联合以上方程得:阻尼力控制其特点是不直接控制机器人与环境的作用力,而是根据机器人端部的位置(或速度)和端部作用力之间的关系,通过调整反馈位置误差、速度误差或刚度来达到控制力的目的,此时接触过程的弹性变形尤为重要。这类力控制不外乎基于位置和速度的两种基本形式。当把力反馈信号转换为位置调整量时,这种力控制称为刚度控制;当把力反馈信号转换为速度修正量时,这种力控制称为阻尼控制;当把力反馈信号同时转换为位置和速度的修正量时,即为阻抗控制。