
工业机器人的程序解析方法及工业机器人控制系统.pdf

一条****淑淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工业机器人的程序解析方法及工业机器人控制系统.pdf
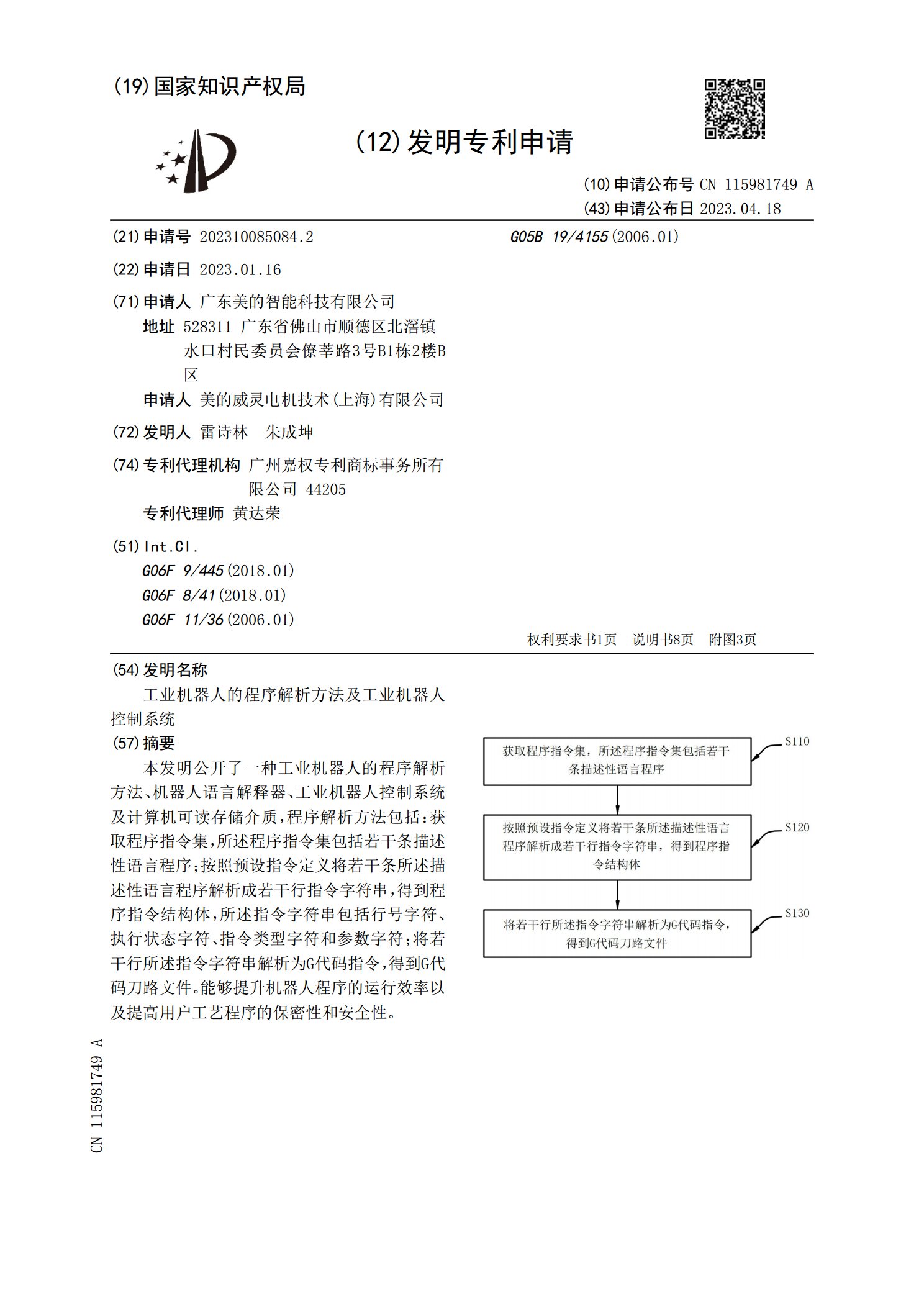
本发明公开了一种工业机器人的程序解析方法、机器人语言解释器、工业机器人控制系统及计算机可读存储介质,程序解析方法包括:获取程序指令集,所述程序指令集包括若干条描述性语言程序;按照预设指令定义将若干条所述描述性语言程序解析成若干行指令字符串,得到程序指令结构体,所述指令字符串包括行号字符、执行状态字符、指令类型字符和参数字符;将若干行所述指令字符串解析为G代码指令,得到G代码刀路文件。能够提升机器人程序的运行效率以及提高用户工艺程序的保密性和安全性。
工业机器人的控制系统.pdf
工业机器人的控制系统工业机器人是指被广泛应用于生产线上完成重复性、繁琐、危险或高精度等工作的机器人。它们可以根据预定程序执行动作,进行各种操作,如装配、焊接、喷涂、搬运等。其中,控制系统是工业机器人的核心部分,对于机器人的精度、稳定性、工作效率等方面具有重要的影响。一、工业机器人的控制系统组成工业机器人的控制系统由硬件和软件两部分组成。硬件部分主要包括机器人主体、传感器、执行器、控制器等,而软件部分则负责控制机器人的运动、执行任务、通信和监控等。1.机器人主体机器人主体是机器人操作的基础,包括轴系、驱动电
工业用机器人和工业用机器人的控制方法.pdf
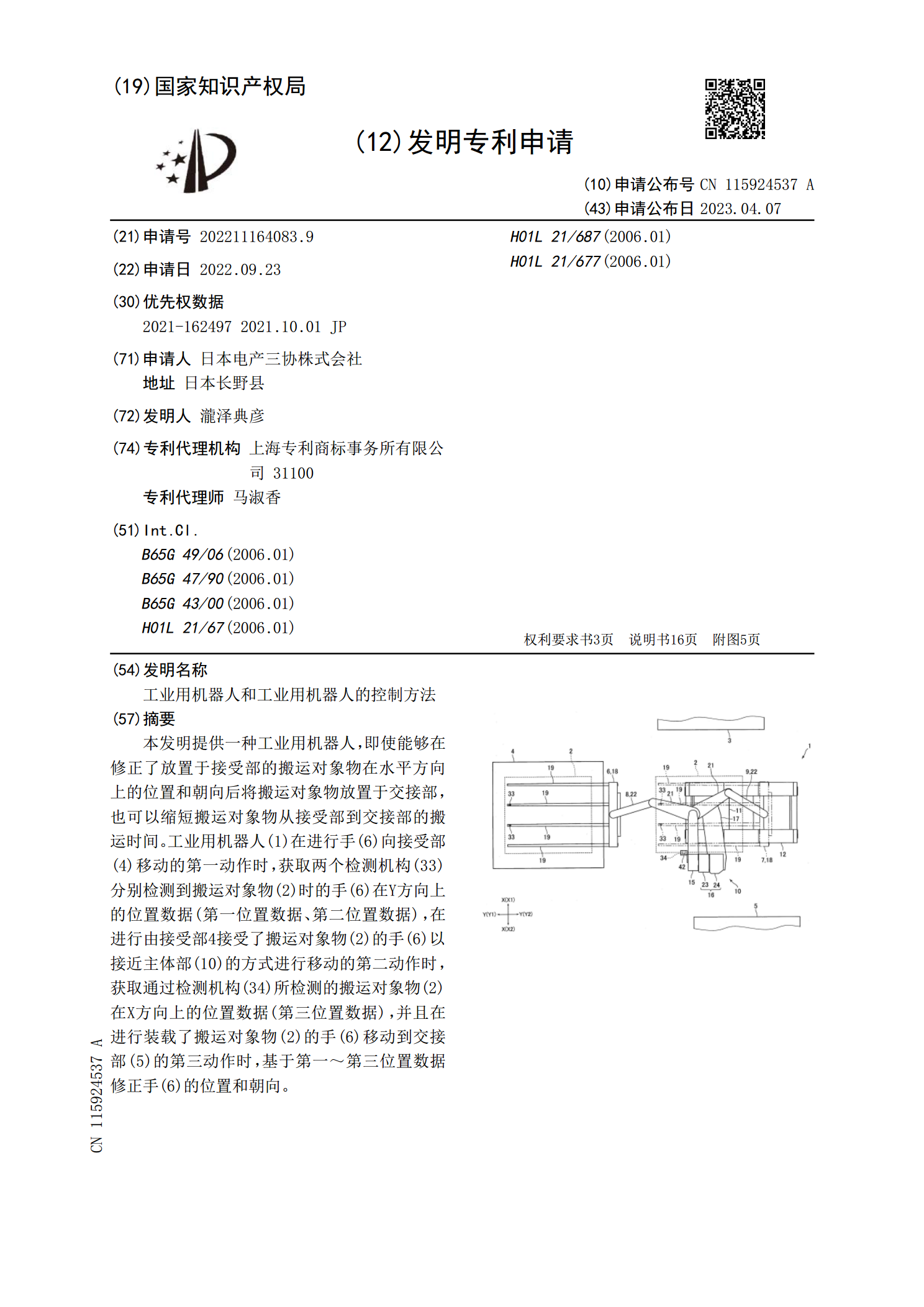
本发明提供一种工业用机器人,即使能够在修正了放置于接受部的搬运对象物在水平方向上的位置和朝向后将搬运对象物放置于交接部,也可以缩短搬运对象物从接受部到交接部的搬运时间。工业用机器人(1)在进行手(6)向接受部(4)移动的第一动作时,获取两个检测机构(33)分别检测到搬运对象物(2)时的手(6)在Y方向上的位置数据(第一位置数据、第二位置数据),在进行由接受部4接受了搬运对象物(2)的手(6)以接近主体部(10)的方式进行移动的第二动作时,获取通过检测机构(34)所检测的搬运对象物(2)在X方向上的位置数据

工业机器人技术基础7.2工业机器人控制系统的特点-课件.pptx
工业机器人控制系统的特点主要内容工业机器人控制系统的特点工业机器人控制系统的主要特点总结

工业机器人技术基础72工业机器人控制系统的特点-课件.pptx
工业机器人控制系统的特点主要内容工业机器人控制系统的特点工业机器人控制系统的主要特点总结