
工业用机器人和工业用机器人的控制方法.pdf

玄静****写意

1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工业用机器人和工业用机器人的控制方法.pdf
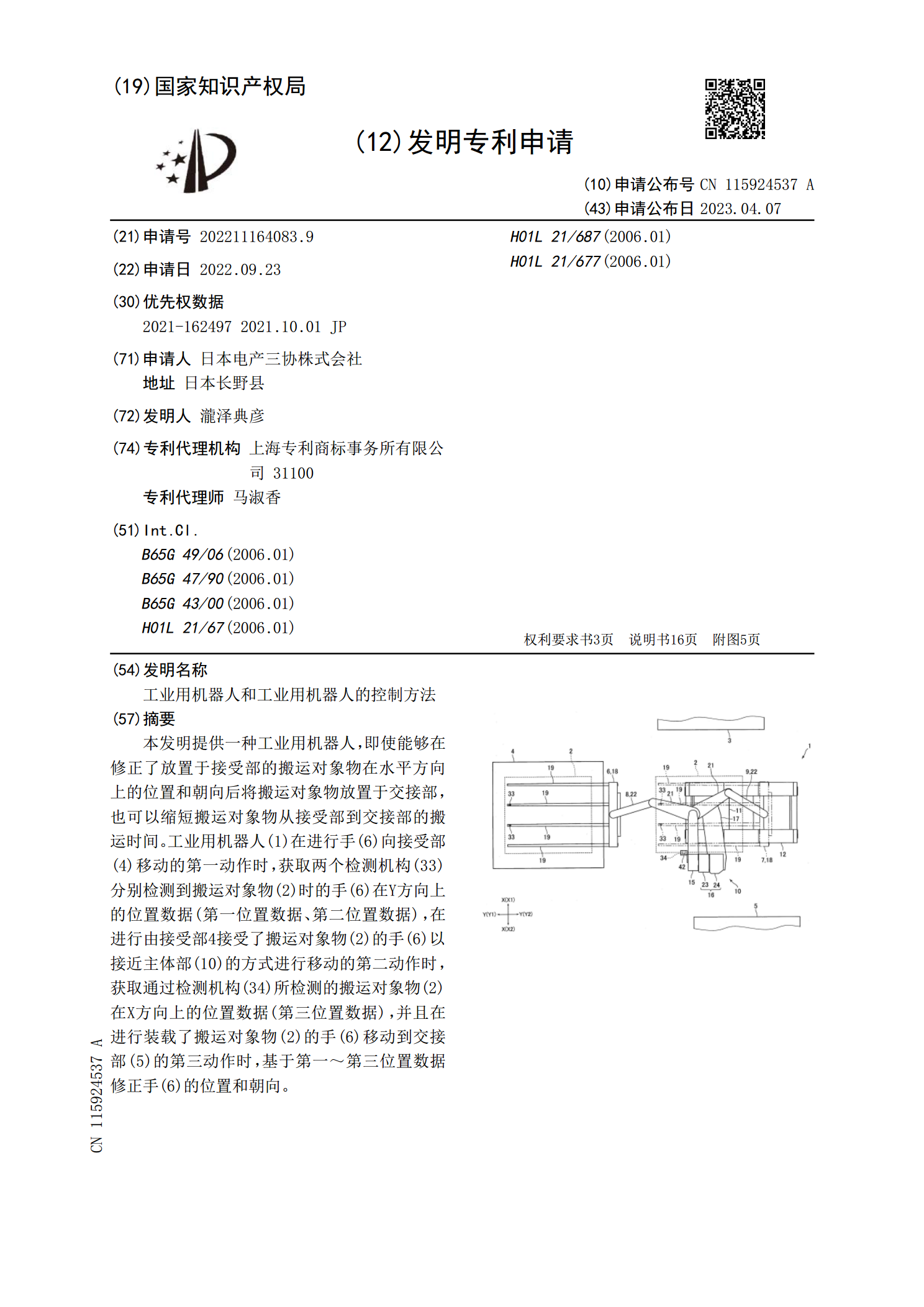
本发明提供一种工业用机器人,即使能够在修正了放置于接受部的搬运对象物在水平方向上的位置和朝向后将搬运对象物放置于交接部,也可以缩短搬运对象物从接受部到交接部的搬运时间。工业用机器人(1)在进行手(6)向接受部(4)移动的第一动作时,获取两个检测机构(33)分别检测到搬运对象物(2)时的手(6)在Y方向上的位置数据(第一位置数据、第二位置数据),在进行由接受部4接受了搬运对象物(2)的手(6)以接近主体部(10)的方式进行移动的第二动作时,获取通过检测机构(34)所检测的搬运对象物(2)在X方向上的位置数据
工业用机器人和制造系统.pdf
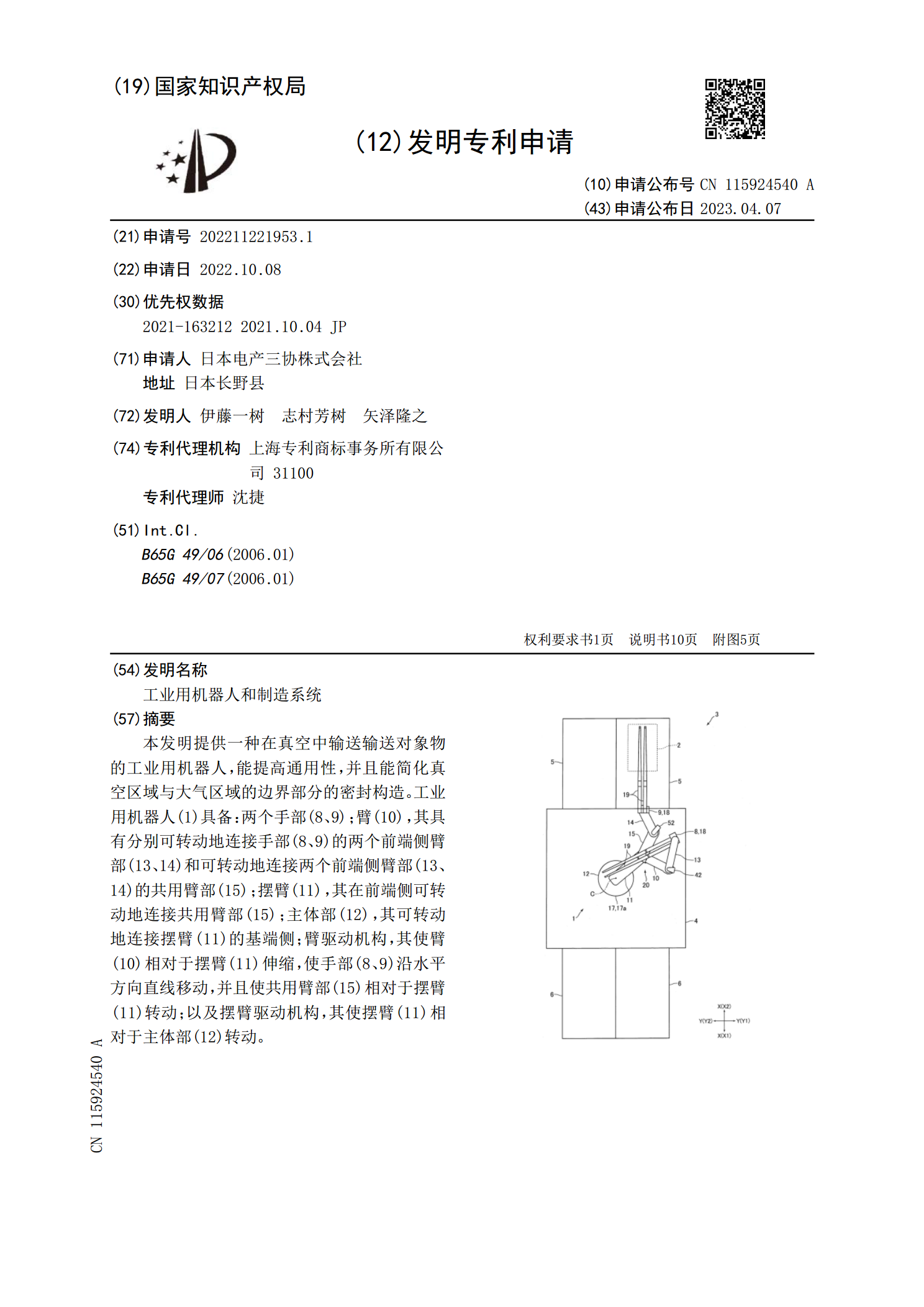
本发明提供一种在真空中输送输送对象物的工业用机器人,能提高通用性,并且能简化真空区域与大气区域的边界部分的密封构造。工业用机器人(1)具备:两个手部(8、9);臂(10),其具有分别可转动地连接手部(8、9)的两个前端侧臂部(13、14)和可转动地连接两个前端侧臂部(13、14)的共用臂部(15);摆臂(11),其在前端侧可转动地连接共用臂部(15);主体部(12),其可转动地连接摆臂(11)的基端侧;臂驱动机构,其使臂(10)相对于摆臂(11)伸缩,使手部(8、9)沿水平方向直线移动,并且使共用臂部(1

工业用机器人.pdf
本发明提供一种能够防止尘埃从框体流出到外部且防止外部空气流入框体内部的工业用机器人。机器人(1)具备:框体(11),其具有开口(16K);升降体(10),其以能够通过开口(16K)的状态容纳于框体(11)中,构成为在上下方向上移动自如;臂(4),其与升降体(10)连接;排气扇(13),其用于排出框体(11)内部的气体;以及喷嘴部(400),其能够朝向框体(11)的开口(16K)和升降体(10)间的间隙(G)送出空气。
工业用机器人.pdf
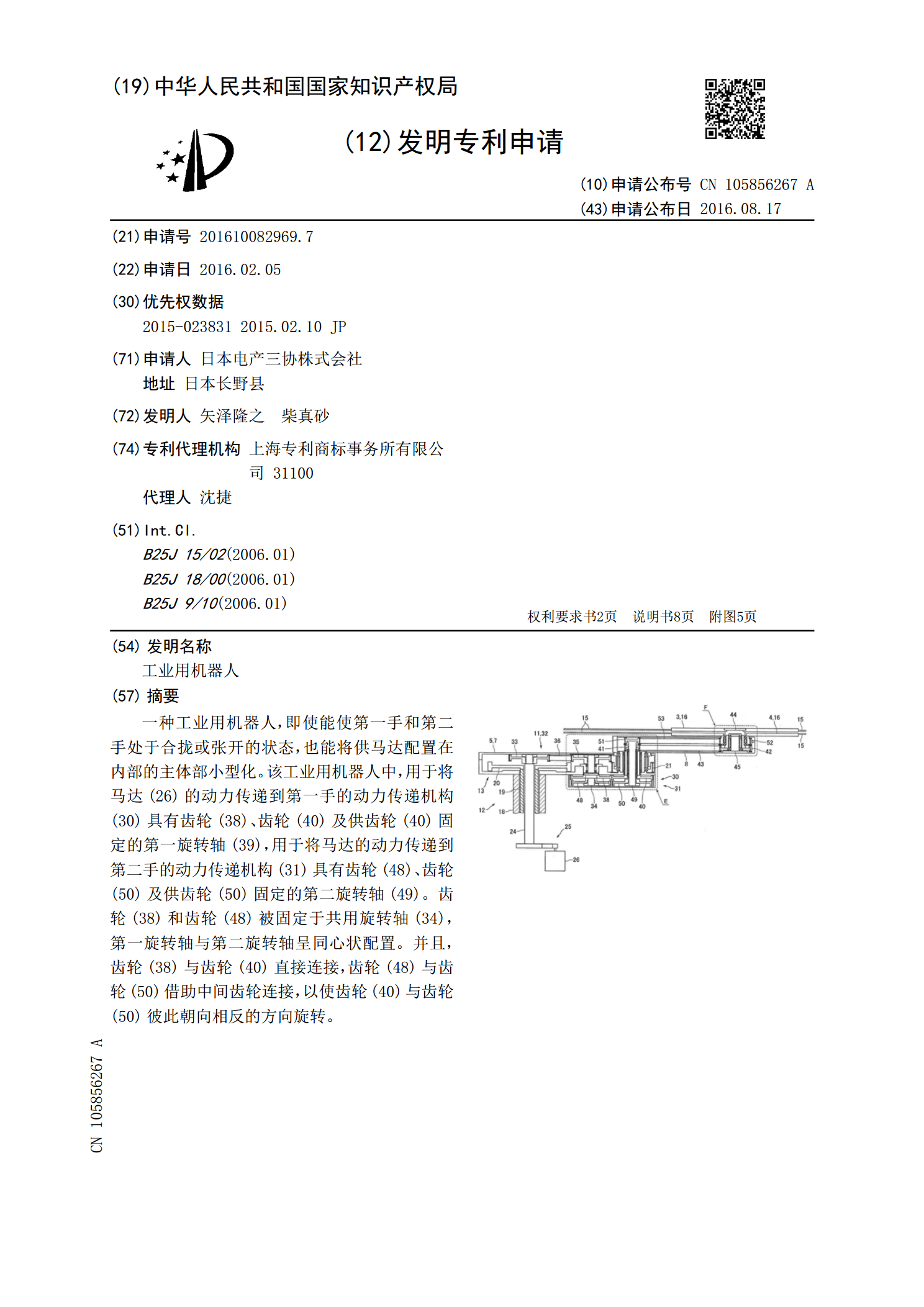
一种工业用机器人,即使能使第一手和第二手处于合拢或张开的状态,也能将供马达配置在内部的主体部小型化。该工业用机器人中,用于将马达(26)的动力传递到第一手的动力传递机构(30)具有齿轮(38)、齿轮(40)及供齿轮(40)固定的第一旋转轴(39),用于将马达的动力传递到第二手的动力传递机构(31)具有齿轮(48)、齿轮(50)及供齿轮(50)固定的第二旋转轴(49)。齿轮(38)和齿轮(48)被固定于共用旋转轴(34),第一旋转轴与第二旋转轴呈同心状配置。并且,齿轮(38)与齿轮(40)直接连接,齿轮(4
工业用机器人.pdf
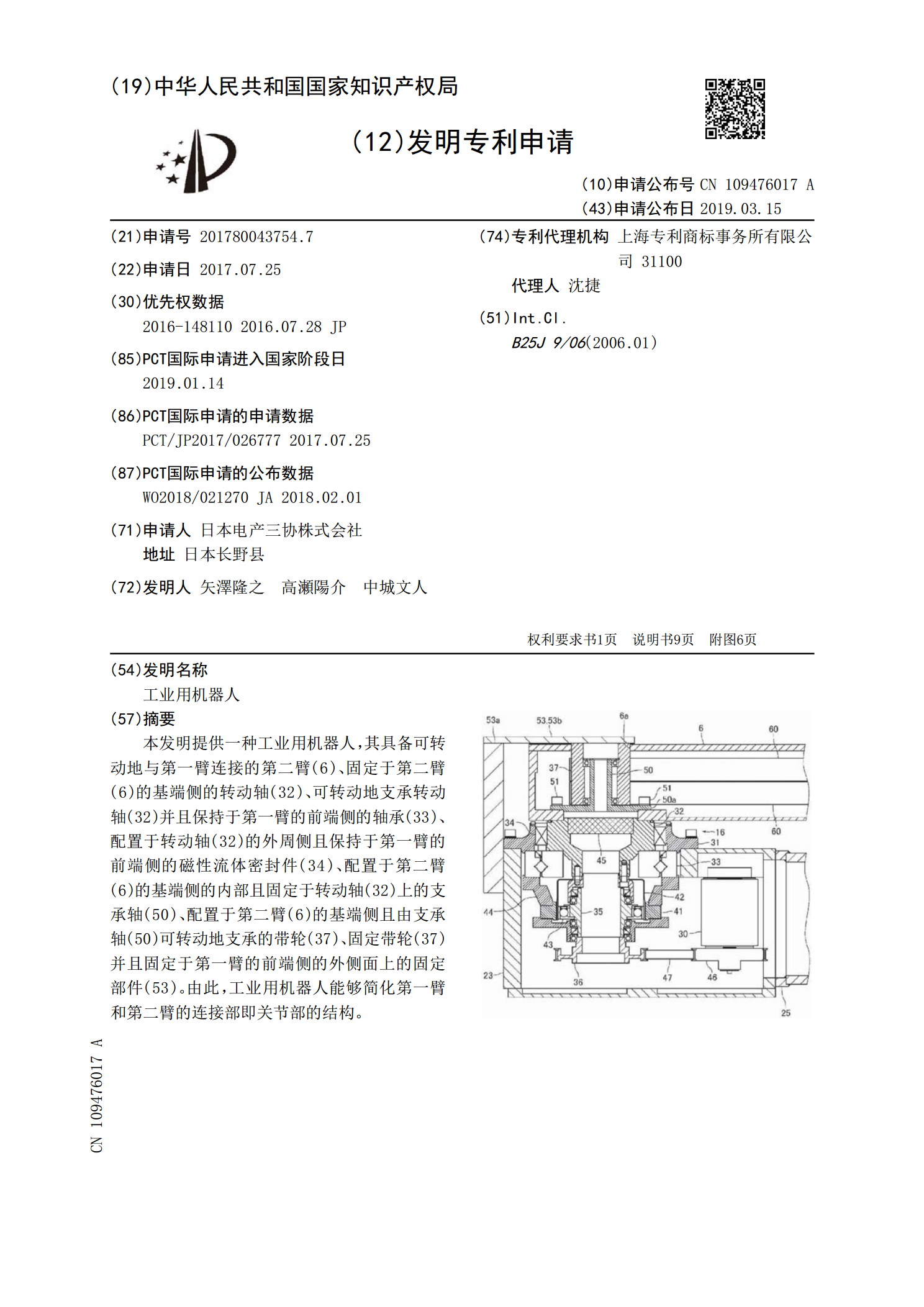
本发明提供一种工业用机器人,其具备可转动地与第一臂连接的第二臂(6)、固定于第二臂(6)的基端侧的转动轴(32)、可转动地支承转动轴(32)并且保持于第一臂的前端侧的轴承(33)、配置于转动轴(32)的外周侧且保持于第一臂的前端侧的磁性流体密封件(34)、配置于第二臂(6)的基端侧的内部且固定于转动轴(32)上的支承轴(50)、配置于第二臂(6)的基端侧且由支承轴(50)可转动地支承的带轮(37)、固定带轮(37)并且固定于第一臂的前端侧的外侧面上的固定部件(53)。由此,工业用机器人能够简化第一臂和第二