
两轮车的转向与速度控制方法.pdf

春兰****89


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

两轮车的转向与速度控制方法.pdf
本发明公开了两轮车的转向与速度控制方法,其包括两轮车上设置的摆杆、带控制器的驱动电机、轮子及控制系统,控制系统采集两轮车的当前输出速度,所述摆杆控制两轮车转向数据,所述两轮车控制系统将采集的转向数据计算出相应的转向增益及转向速度变化量;将两轮车前进时的速度定义为正值,两轮车后退时的速度定义为负值,在两轮车的当前输出速度为负值并且所述摆杆复位到初始状态时,所述两轮车转向增益取值进行切换,两轮车的当前输出速度为零时转向增益取最大值。本发明两轮车的转向与速度控制方法通过在两轮车的当前输出速度为负值时转向增益取值
两轮车转向控制方法及两轮车.pdf
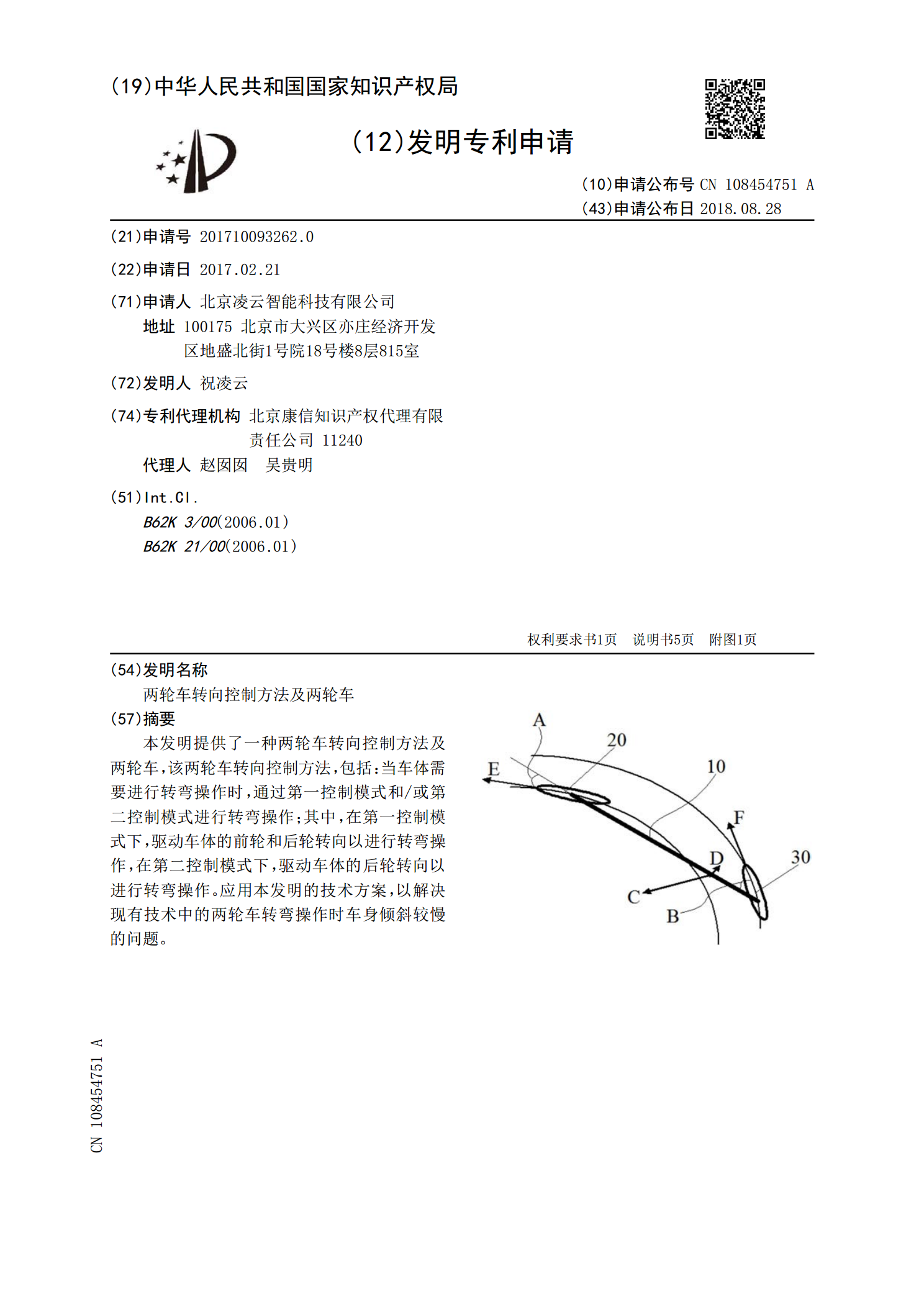
本发明提供了一种两轮车转向控制方法及两轮车,该两轮车转向控制方法,包括:当车体需要进行转弯操作时,通过第一控制模式和/或第二控制模式进行转弯操作;其中,在第一控制模式下,驱动车体的前轮和后轮转向以进行转弯操作,在第二控制模式下,驱动车体的后轮转向以进行转弯操作。应用本发明的技术方案,以解决现有技术中的两轮车转弯操作时车身倾斜较慢的问题。

一种两轮平衡车及其转向控制方法.pdf
本发明涉及一种两轮平衡车,包括:平衡车主体,内置主控系统,其上端设有左踏板和右踏板,踏板设置有感知载人和空载状态的装置;无线摇杆,设置有转向摇杆和开关按键,无线摇杆与平衡车主体连接;无线接收装置,设置于所述平衡车主体,用于收到无线摇杆发出的转向信号后控制所述两轮平衡车转向。本发明还提供一种两轮平衡车的转向控制方法。本发明的优点体现在:利用无线摇杆替代了传统的扶杆转向系统,即减轻了平衡车的重量,减少了车体尺寸,在行驶中遇到紧急或危险情况时,也可方便的实现人车分离,安全性更高;另外,在遇到不适合驾驶的地带,用

两轮平衡车的控制方法.pdf
本发明提供一种两轮平衡车的控制方法,包括步骤:S1:控制器、定时器和传感器进入初始化;S2:传感器将采集的信号发送至控制器;S3:控制器处理采集的信号,得到车体当前的俯仰角度???????????????????????????????????????????????
一种压力控制转向的两轮电动平衡车及其转向控制方式.pdf
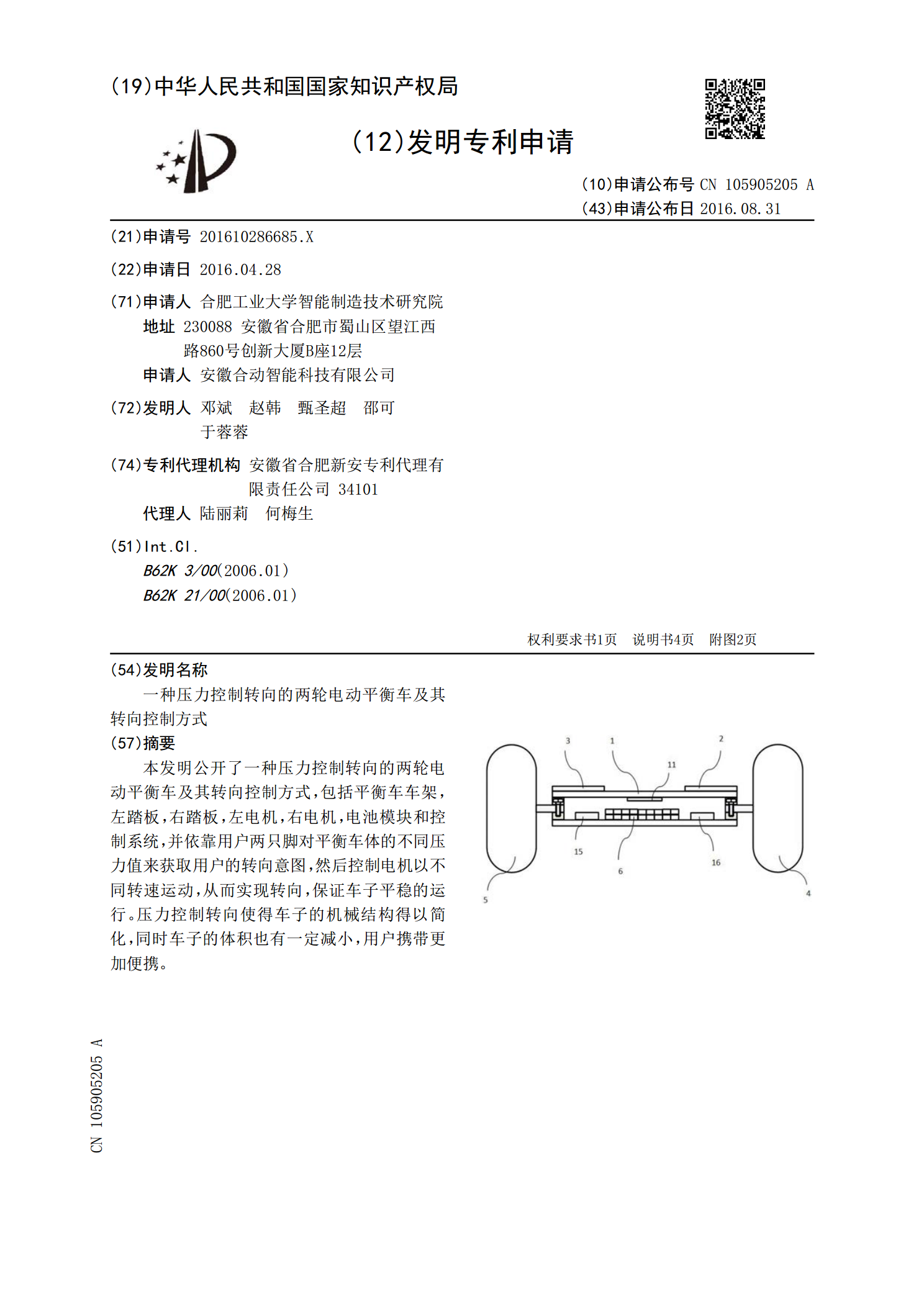
本发明公开了一种压力控制转向的两轮电动平衡车及其转向控制方式,包括平衡车车架,左踏板,右踏板,左电机,右电机,电池模块和控制系统,并依靠用户两只脚对平衡车体的不同压力值来获取用户的转向意图,然后控制电机以不同转速运动,从而实现转向,保证车子平稳的运行。压力控制转向使得车子的机械结构得以简化,同时车子的体积也有一定减小,用户携带更加便携。