
一种柔性可控的关节驱动器.pdf

书生****写意


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种柔性可控的关节驱动器.pdf
本发明涉及一种柔性可控的关节驱动器,其特征在于:它包括外壳、刚度调节机构、动力输入机构和控制器;刚度调节机构包括电机,电机的输出轴连接主动齿轮,主动齿轮的两侧各啮合从动齿轮,两从动齿轮的中心轴均为丝杠;两丝杠上分别螺旋连接螺母滑块,两螺母滑块的外侧凸缘分别插入外壳两侧盖内壁设置的导向滑槽内,两螺母滑块的内侧夹设有L形簧片;其中一螺母滑块的侧面固定连接有滑动片,滑动片的另一端插设在一固定在外壳内的位移传感器中,动力输入机构包括用于连接外部驱动电机的输入轴,输入轴通过轴承连接在外壳后盖上,输入轴的末端沿轴向设

刚度可调的柔性关节驱动器机构.pdf
本发明公开了一种刚度可调的柔性关节驱动器机构,该驱动器机构分为驱动端、调整端和柔性关节三部分。其中驱动端为柔性关节运动提供动力,调整端负责改变柔性关节的刚度,柔性关节则起到减缓冲击、调节刚度的作用。附带有驱动电机,能够主动驱动关节运动;采用曲斜面-转轮配合结构的变刚度系统,摩擦阻力小,传动精密;安装有四个绝对式编码器,工作过程中实现有效检测,灵敏度高,故障率低;外壳全封闭,结构紧凑,能够在恶劣的环境下工作;从极大柔性到完全刚性,关节刚度的变化线性可控。
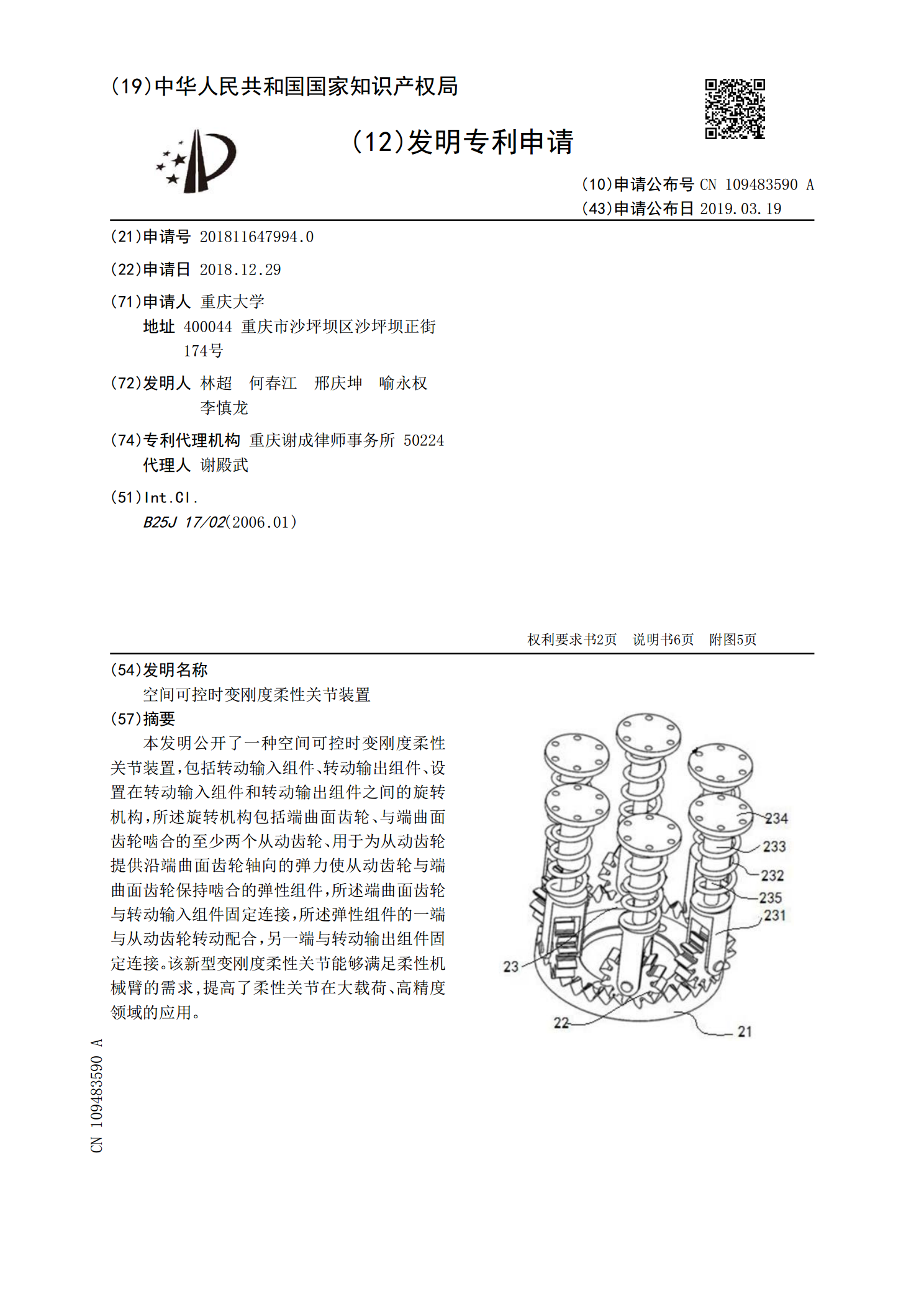
空间可控时变刚度柔性关节装置.pdf
本发明公开了一种空间可控时变刚度柔性关节装置,包括转动输入组件、转动输出组件、设置在转动输入组件和转动输出组件之间的旋转机构,所述旋转机构包括端曲面齿轮、与端曲面齿轮啮合的至少两个从动齿轮、用于为从动齿轮提供沿端曲面齿轮轴向的弹力使从动齿轮与端曲面齿轮保持啮合的弹性组件,所述端曲面齿轮与转动输入组件固定连接,所述弹性组件的一端与从动齿轮转动配合,另一端与转动输出组件固定连接。该新型变刚度柔性关节能够满足柔性机械臂的需求,提高了柔性关节在大载荷、高精度领域的应用。
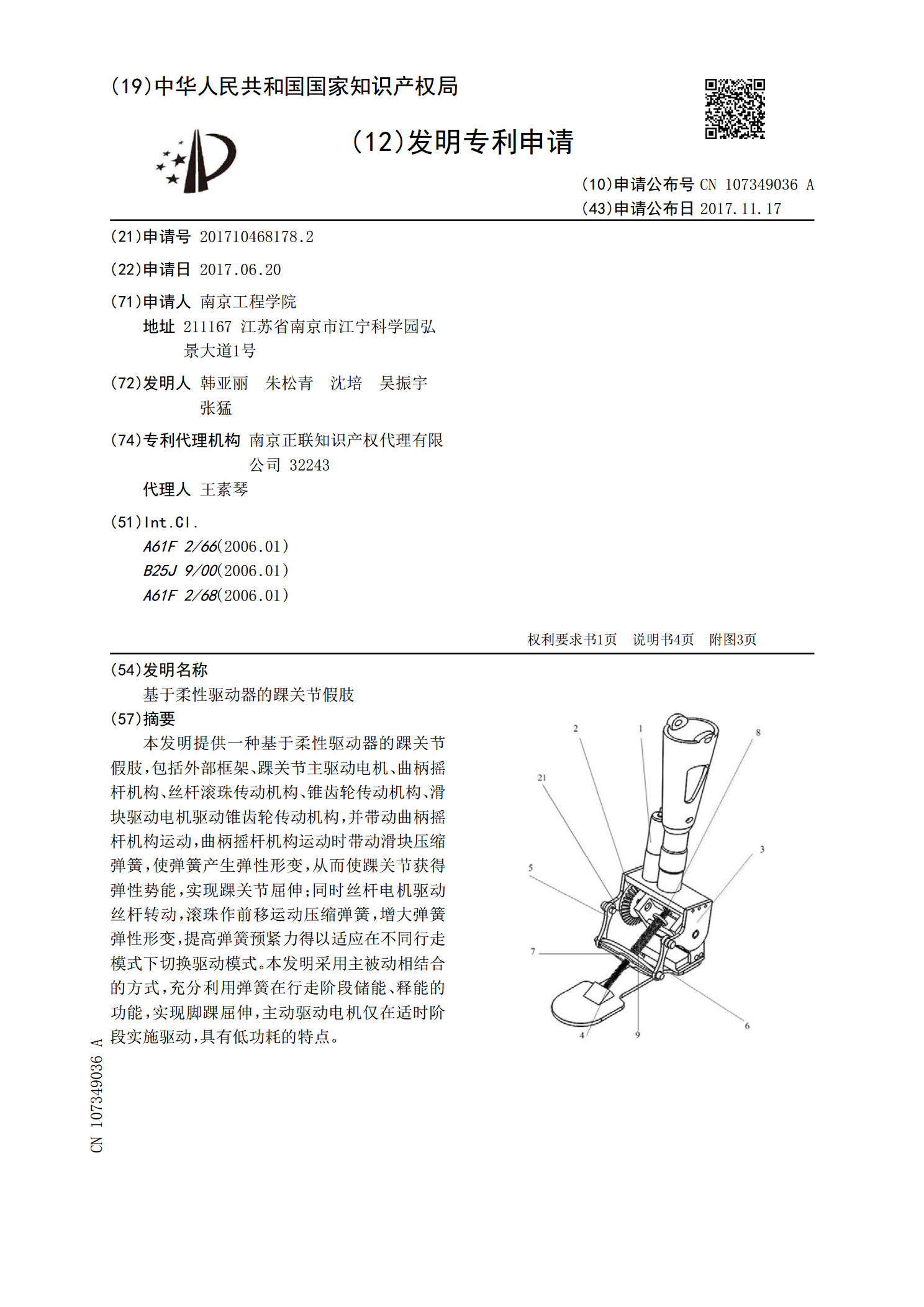
基于柔性驱动器的踝关节假肢.pdf
本发明提供一种基于柔性驱动器的踝关节假肢,包括外部框架、踝关节主驱动电机、曲柄摇杆机构、丝杆滚珠传动机构、锥齿轮传动机构、滑块驱动电机驱动锥齿轮传动机构,并带动曲柄摇杆机构运动,曲柄摇杆机构运动时带动滑块压缩弹簧,使弹簧产生弹性形变,从而使踝关节获得弹性势能,实现踝关节屈伸;同时丝杆电机驱动丝杆转动,滚珠作前移运动压缩弹簧,增大弹簧弹性形变,提高弹簧预紧力得以适应在不同行走模式下切换驱动模式。本发明采用主被动相结合的方式,充分利用弹簧在行走阶段储能、释能的功能,实现脚踝屈伸,主动驱动电机仅在适时阶段实施驱

基于气动柔性驱动器的侧摆关节特性.docx
基于气动柔性驱动器的侧摆关节特性气动柔性驱动器在机器人领域中得到了广泛应用。这种传动装置结构简单、柔性、精度高等特点,可以解决传统机械传动的不足。本文将探讨气动柔性驱动器运用于侧摆关节时所具有的特性。一、侧摆关节的基本结构与工作原理侧摆关节是指在机器人系统中实现侧向平移的机构,类似于人体的肩部关节。它由机构架、运动机构、传动机构、感知和控制系统等组成。其中,传动机构是侧摆关节的核心部分,是实现关节摆动的主要驱动部件。传统的侧摆关节通常采用电机驱动和机械结构实现动力传递。这种传动方式存在一些缺点,例如传动精