
空间可控时变刚度柔性关节装置.pdf

新槐****公主


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
空间可控时变刚度柔性关节装置.pdf
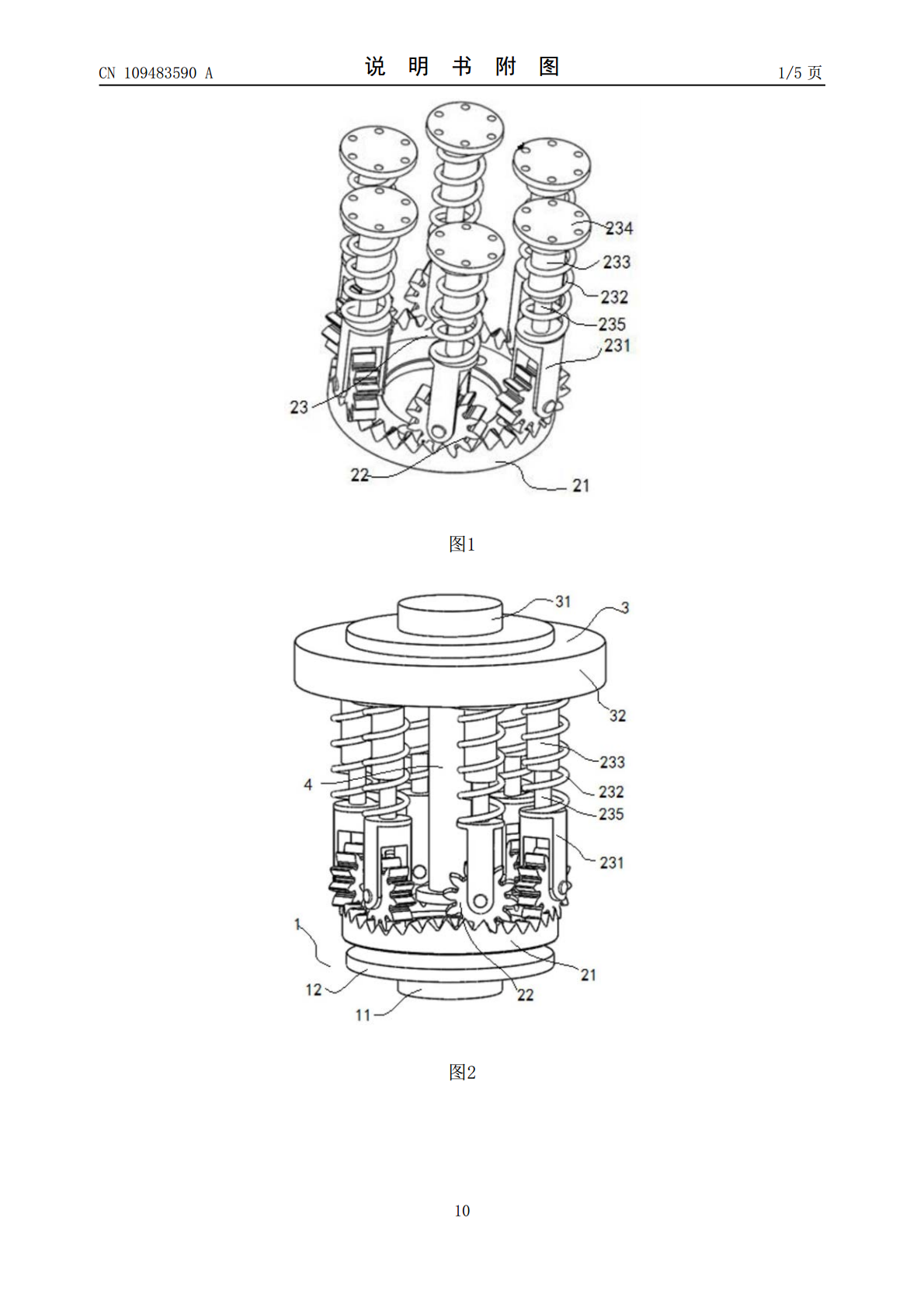
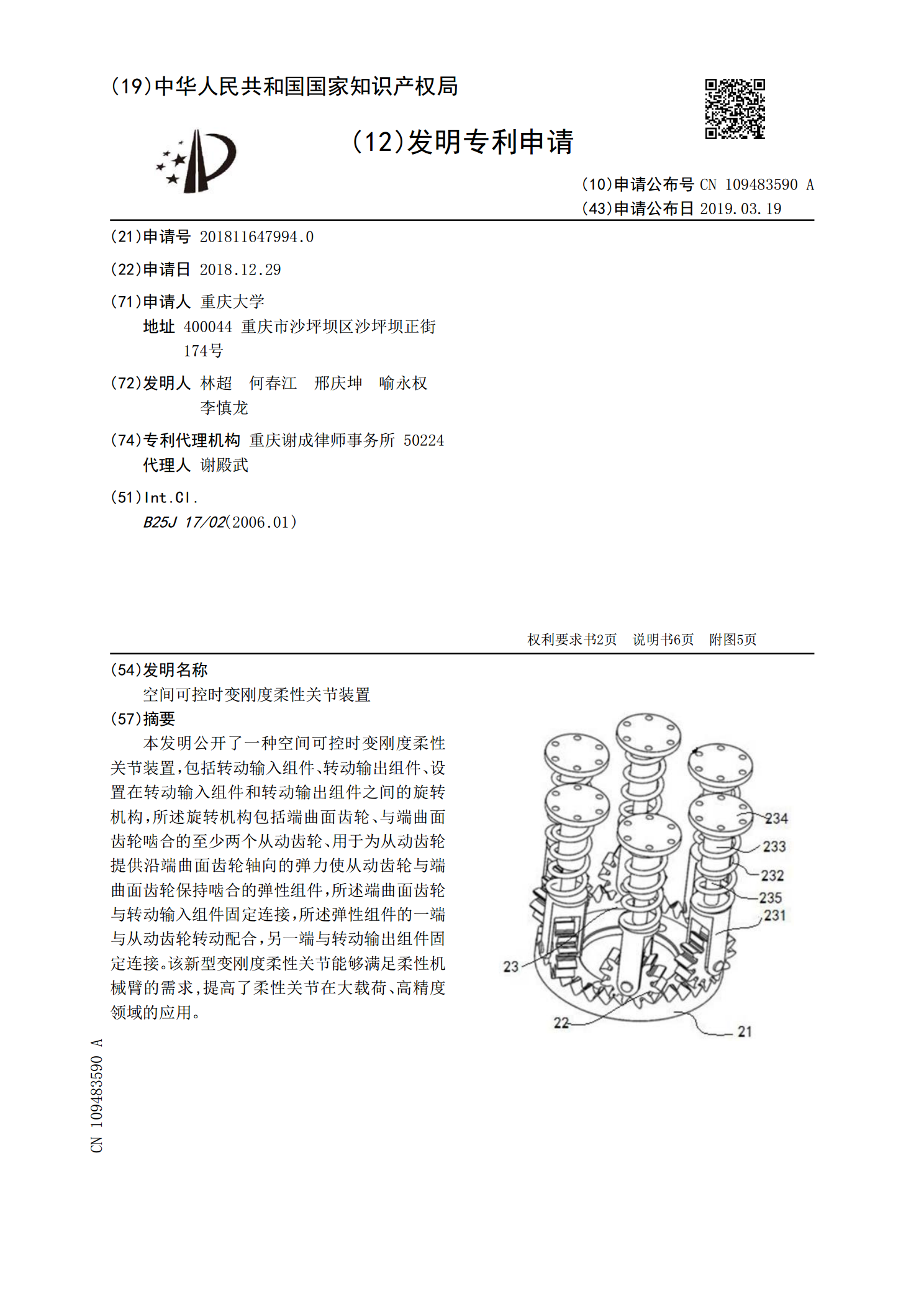
本发明公开了一种空间可控时变刚度柔性关节装置,包括转动输入组件、转动输出组件、设置在转动输入组件和转动输出组件之间的旋转机构,所述旋转机构包括端曲面齿轮、与端曲面齿轮啮合的至少两个从动齿轮、用于为从动齿轮提供沿端曲面齿轮轴向的弹力使从动齿轮与端曲面齿轮保持啮合的弹性组件,所述端曲面齿轮与转动输入组件固定连接,所述弹性组件的一端与从动齿轮转动配合,另一端与转动输出组件固定连接。该新型变刚度柔性关节能够满足柔性机械臂的需求,提高了柔性关节在大载荷、高精度领域的应用。
一种可控变刚度柔性肘关节康复机器人.pdf
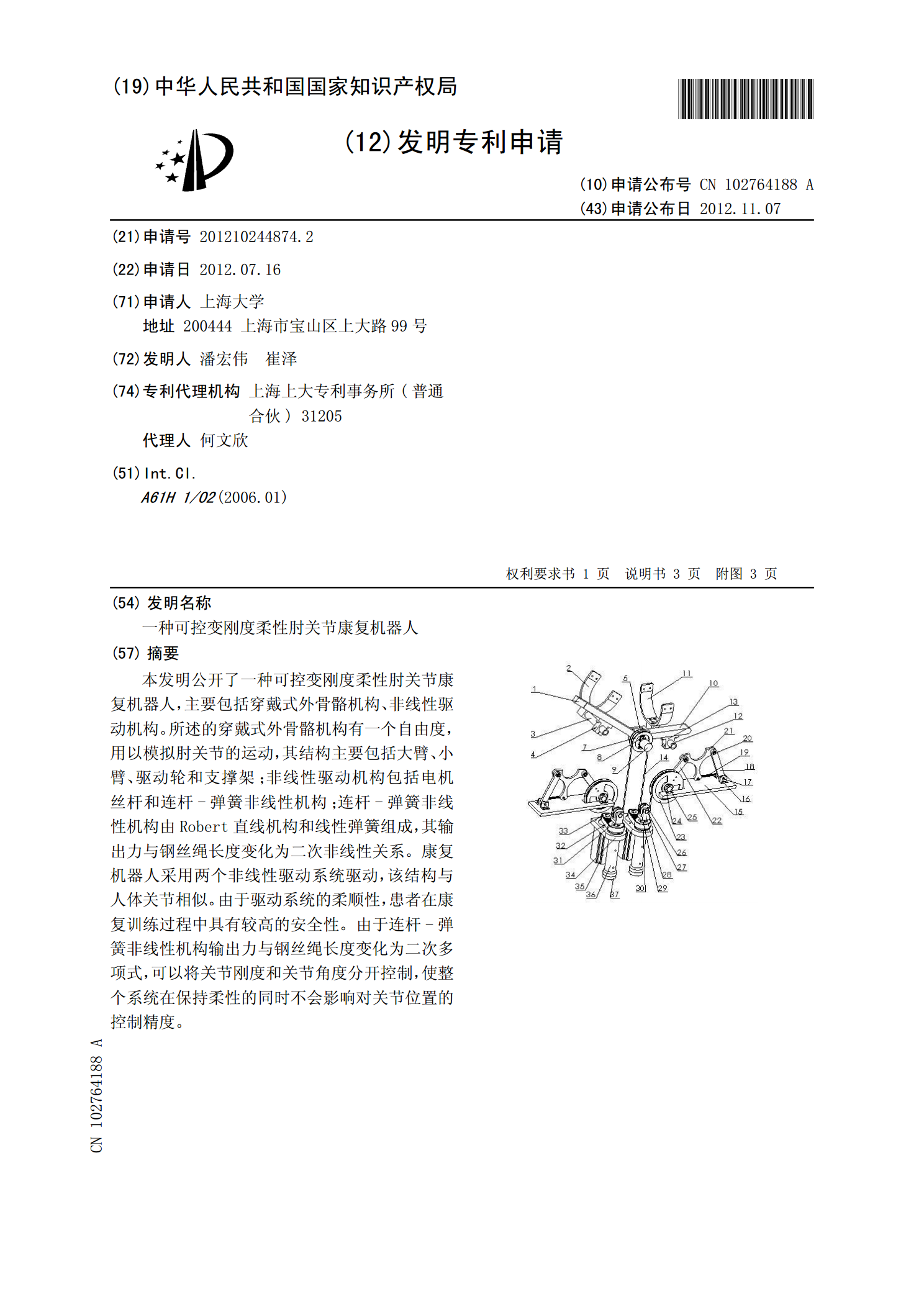
本发明公开了一种可控变刚度柔性肘关节康复机器人,主要包括穿戴式外骨骼机构、非线性驱动机构。所述的穿戴式外骨骼机构有一个自由度,用以模拟肘关节的运动,其结构主要包括大臂、小臂、驱动轮和支撑架;非线性驱动机构包括电机丝杆和连杆-弹簧非线性机构;连杆-弹簧非线性机构由Robert直线机构和线性弹簧组成,其输出力与钢丝绳长度变化为二次非线性关系。康复机器人采用两个非线性驱动系统驱动,该结构与人体关节相似。由于驱动系统的柔顺性,患者在康复训练过程中具有较高的安全性。由于连杆-弹簧非线性机构输出力与钢丝绳长度变化为二
一种柔性关节变刚度机构.pdf
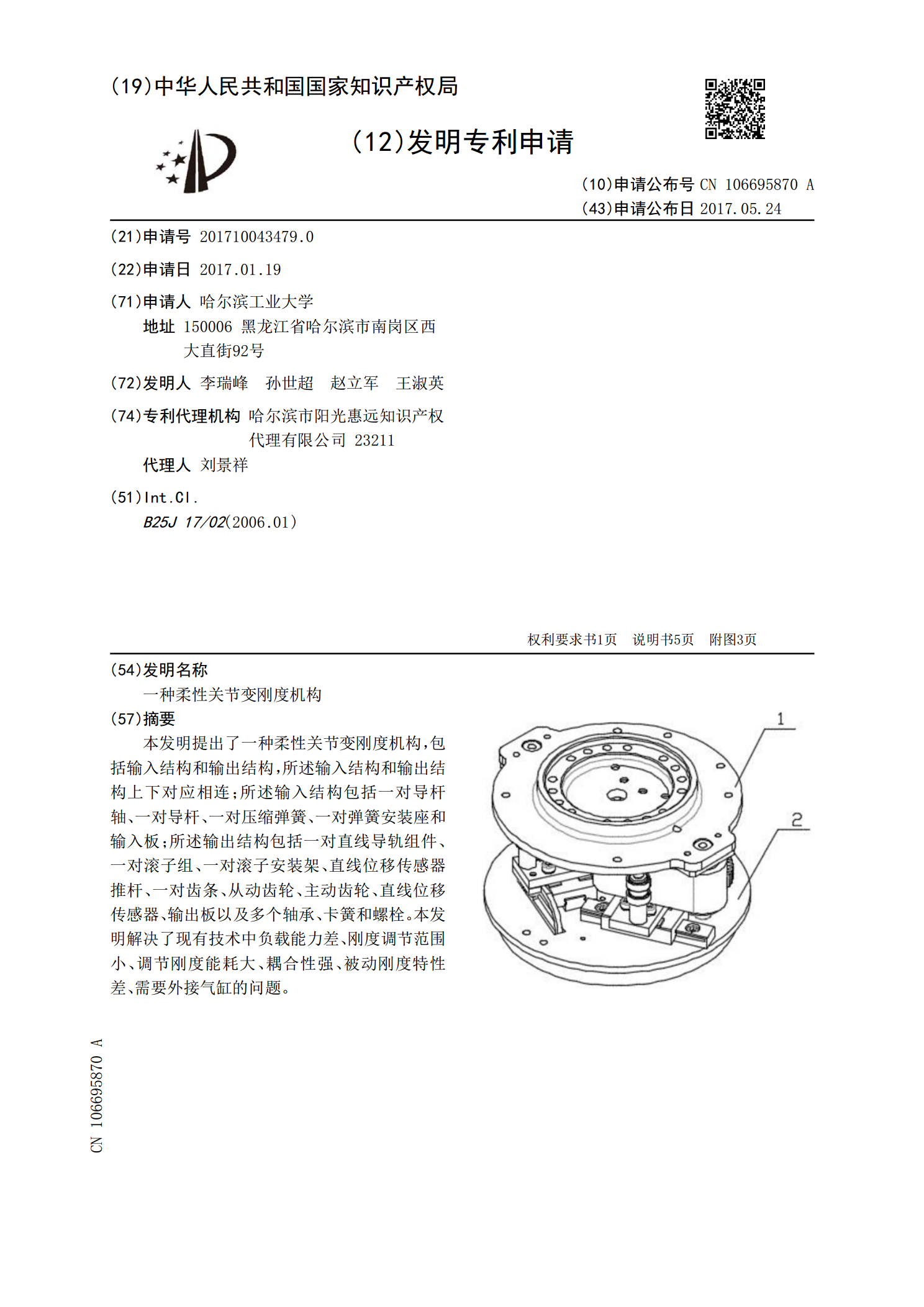
本发明提出了一种柔性关节变刚度机构,包括输入结构和输出结构,所述输入结构和输出结构上下对应相连;所述输入结构包括一对导杆轴、一对导杆、一对压缩弹簧、一对弹簧安装座和输入板;所述输出结构包括一对直线导轨组件、一对滚子组、一对滚子安装架、直线位移传感器推杆、一对齿条、从动齿轮、主动齿轮、直线位移传感器、输出板以及多个轴承、卡簧和螺栓。本发明解决了现有技术中负载能力差、刚度调节范围小、调节刚度能耗大、耦合性强、被动刚度特性差、需要外接气缸的问题。

一种旋转型变刚度柔性关节.pdf
本发明公开一种旋转型变刚度柔性关节,包含被动变刚度机构和主动柔性驱动机构,其特征在于所述被动变刚度机构主要包括:关节输出盘、关节第一驱动盘、关节第二驱动盘、第一、第二凸轮组及第一、第二凸轮组安装座、光轴及其支撑座、调刚度安装盘、直线轴承和弹簧,所述关节第一驱动盘与关节第二驱动盘固定连接;关节第二驱动盘与关节输出盘上有相同轮廓线的凸轮槽,且该轮廓线可实现关节等效刚度随关节柔性变形角度而变化,第一、第二凸轮组凸轮同时与第二驱动盘、关节输出盘相接触;所述主动柔性驱动机构主要包括:梯形丝杠、丝杠支撑座、丝杠螺母、

柔性机械臂变刚度关节的设计与仿真研究.docx
柔性机械臂变刚度关节的设计与仿真研究柔性机械臂变刚度关节的设计与仿真研究摘要:柔性机械臂由于其灵活性和适应性,已经成为机器人领域的研究热点。然而,传统的刚性关节限制了机械臂的灵活性和适应性。因此,研究柔性机械臂变刚度关节的设计与仿真具有重要意义。本文介绍了柔性机械臂的工作原理和现有的关节设计方法,然后提出了一种基于力感知技术的柔性机械臂变刚度关节设计方法,并进行了仿真验证。结果表明,该设计方法有效地提高了柔性机械臂的适应性和控制精度。关键词:柔性机械臂、变刚度关节、设计、仿真1.引言柔性机械臂是一种具有灵