
基于柔性驱动器的踝关节假肢.pdf

一只****生物


1/9
2/9

3/9
4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于柔性驱动器的踝关节假肢.pdf
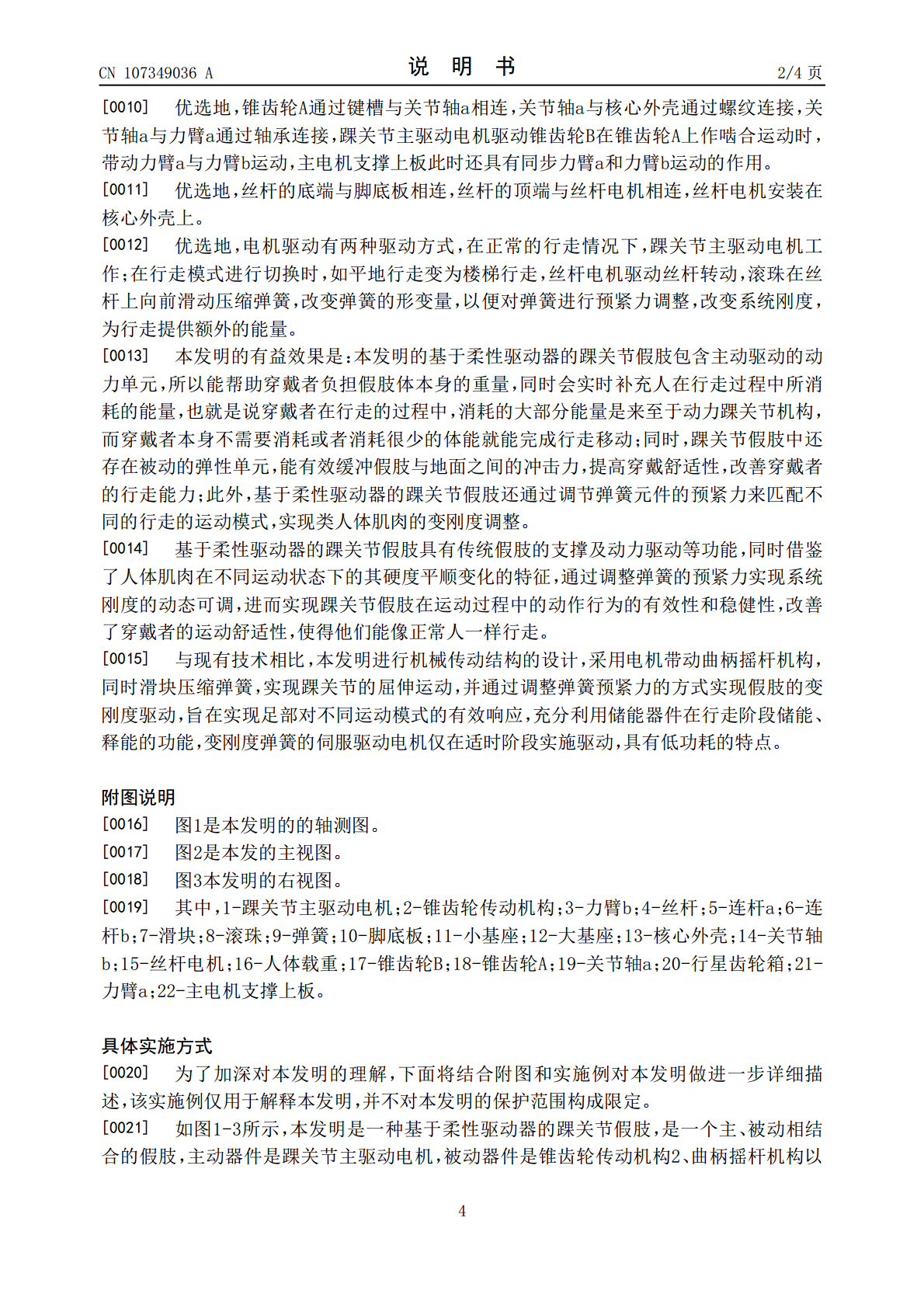
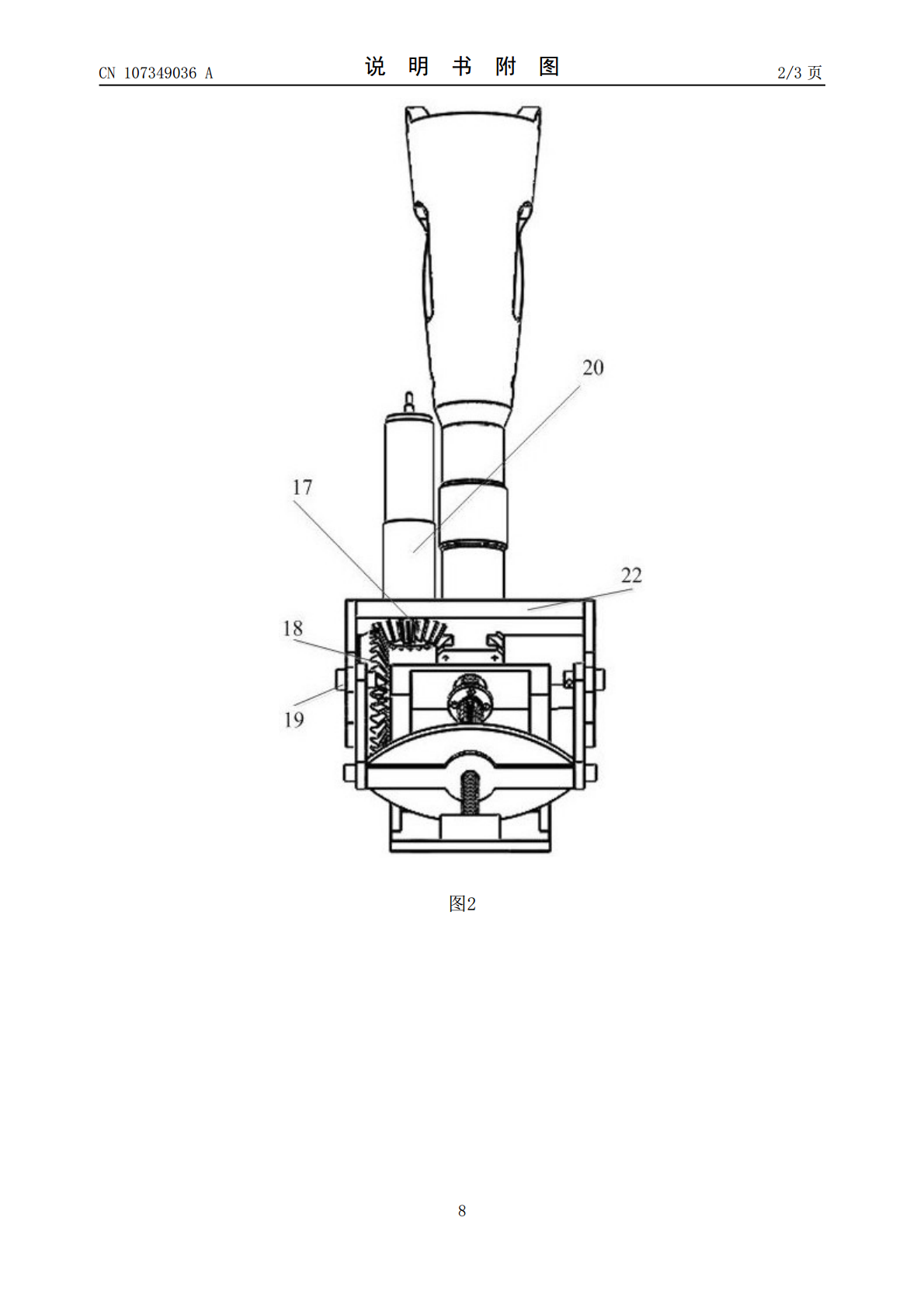
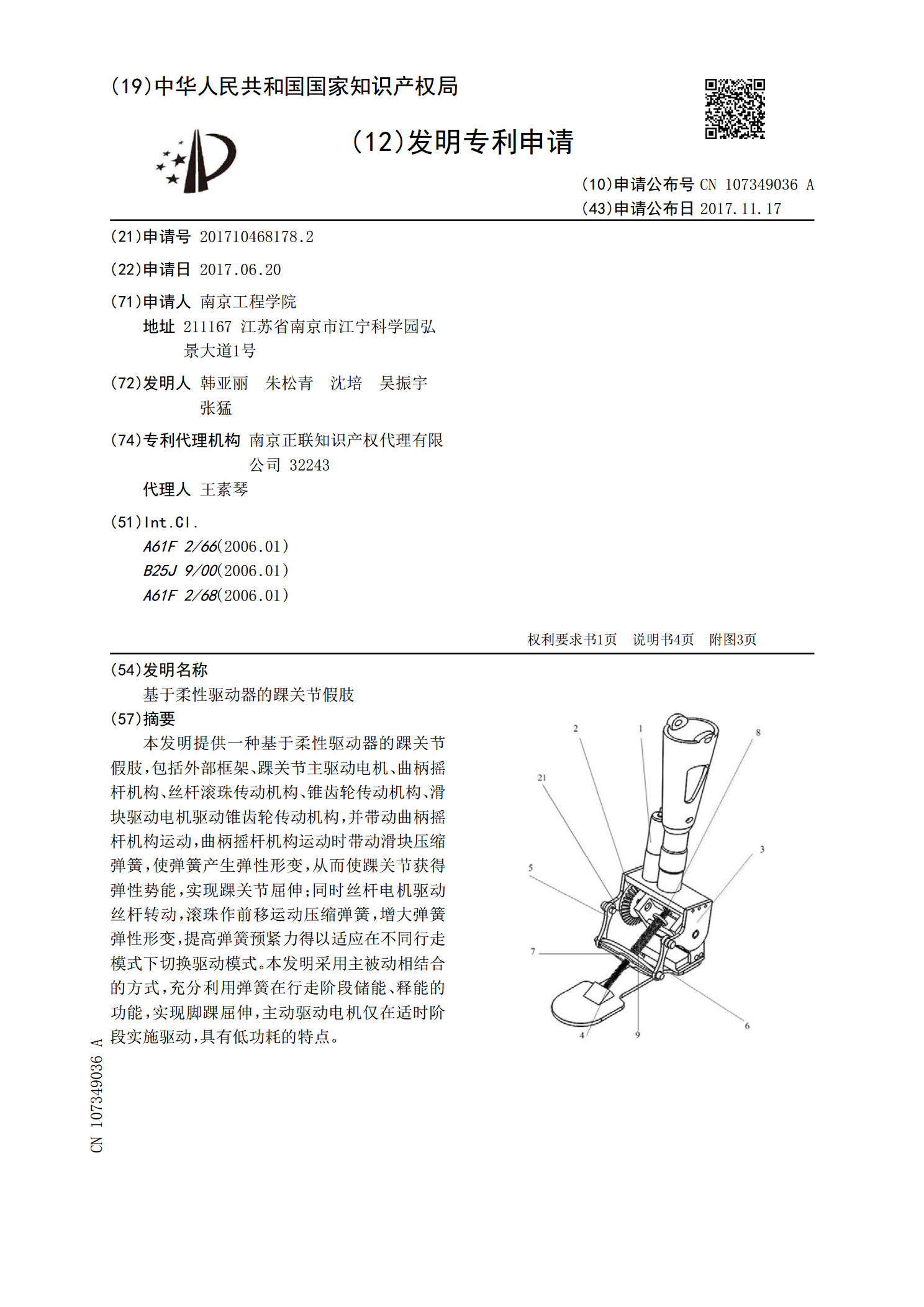
本发明提供一种基于柔性驱动器的踝关节假肢,包括外部框架、踝关节主驱动电机、曲柄摇杆机构、丝杆滚珠传动机构、锥齿轮传动机构、滑块驱动电机驱动锥齿轮传动机构,并带动曲柄摇杆机构运动,曲柄摇杆机构运动时带动滑块压缩弹簧,使弹簧产生弹性形变,从而使踝关节获得弹性势能,实现踝关节屈伸;同时丝杆电机驱动丝杆转动,滚珠作前移运动压缩弹簧,增大弹簧弹性形变,提高弹簧预紧力得以适应在不同行走模式下切换驱动模式。本发明采用主被动相结合的方式,充分利用弹簧在行走阶段储能、释能的功能,实现脚踝屈伸,主动驱动电机仅在适时阶段实施驱

含柔性动力踝关节和脚趾关节的动力膝下假肢.pdf
本发明涉及一种含柔性动力踝关节和脚趾关节的动力膝下假肢,其特征在于:它包括踝关节运动机构和脚趾关节运动机构,踝关节运动机构包括后脚掌、踝关节支撑架、小腿挡板和踝关节电机;踝关节支撑架固定在后脚掌上部,其上端与踝关节轴连接架铰接,踝关节轴连接架固连在两小腿挡板之间;踝关节电机固连在两小腿挡板之间,其输出端通过联轴器固连踝关节丝杠的一端,该丝杠的另一端通过踝关节弹簧机构与后脚掌连接;脚趾关节运动机构包括前脚掌和脚趾关节电机,前脚掌与后脚掌铰接,脚趾关节电机与后脚掌固连;脚趾关节电机的输出轴通过联轴器与脚趾关节

踝关节假肢.pdf
本发明提供了一种踝关节假肢,包括假脚、脚踝连接座、踝关节助力装置和用于连接小腿连接件的踝关节支撑架,脚踝连接座与踝关节支撑架转动连接,脚踝连接座的底部固定于假脚上;踝关节助力装置包括驱动电机、踝关节传动机构和蓄能组件。本发明的踝关节假肢通过驱动电机驱动滚珠丝杠的丝杠轴转动,使沿着丝杠轴作直线运动的螺母驱动拉杆,拉杆带动脚踝连接座与踝关节支撑架发生相对转动。并且,在固定于踝关节支撑架上的支撑台与螺母之间设有助力弹簧,通过助力弹簧将压缩形变所产生的弹性势能瞬时释放,以足够大的瞬时助力力矩对踝关节假肢进行驱动,
面向下肢踝关节外骨骼机器人的变刚度柔性驱动器.pdf
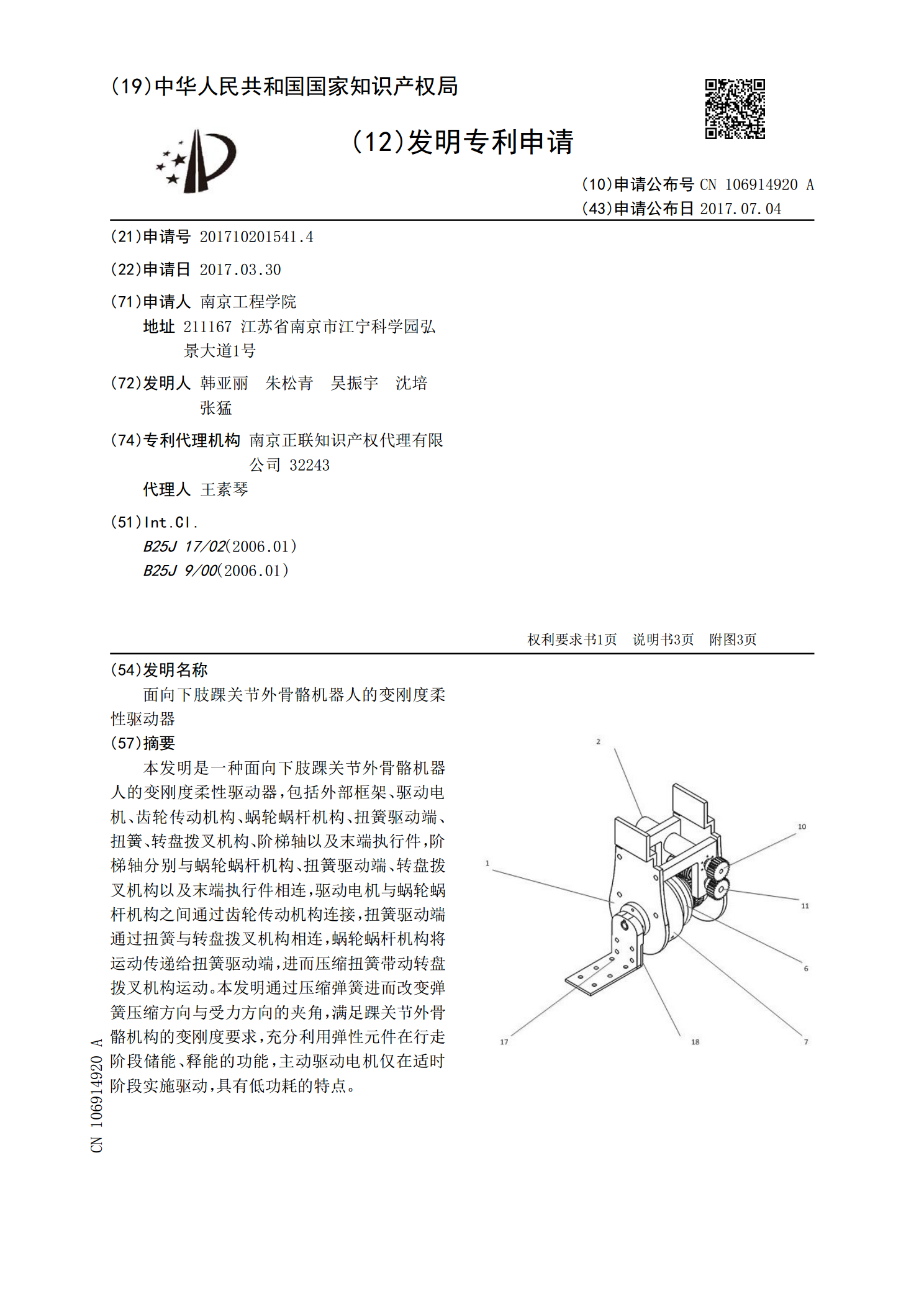
本发明是一种面向下肢踝关节外骨骼机器人的变刚度柔性驱动器,包括外部框架、驱动电机、齿轮传动机构、蜗轮蜗杆机构、扭簧驱动端、扭簧、转盘拨叉机构、阶梯轴以及末端执行件,阶梯轴分别与蜗轮蜗杆机构、扭簧驱动端、转盘拨叉机构以及末端执行件相连,驱动电机与蜗轮蜗杆机构之间通过齿轮传动机构连接,扭簧驱动端通过扭簧与转盘拨叉机构相连,蜗轮蜗杆机构将运动传递给扭簧驱动端,进而压缩扭簧带动转盘拨叉机构运动。本发明通过压缩弹簧进而改变弹簧压缩方向与受力方向的夹角,满足踝关节外骨骼机构的变刚度要求,充分利用弹性元件在行走阶段储能

基于气动柔性驱动器的侧摆关节特性.docx
基于气动柔性驱动器的侧摆关节特性气动柔性驱动器在机器人领域中得到了广泛应用。这种传动装置结构简单、柔性、精度高等特点,可以解决传统机械传动的不足。本文将探讨气动柔性驱动器运用于侧摆关节时所具有的特性。一、侧摆关节的基本结构与工作原理侧摆关节是指在机器人系统中实现侧向平移的机构,类似于人体的肩部关节。它由机构架、运动机构、传动机构、感知和控制系统等组成。其中,传动机构是侧摆关节的核心部分,是实现关节摆动的主要驱动部件。传统的侧摆关节通常采用电机驱动和机械结构实现动力传递。这种传动方式存在一些缺点,例如传动精