
大型球面非球面轮廓扫描测量方法与装置.pdf

甲申****66

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

大型球面非球面轮廓扫描测量方法与装置.pdf
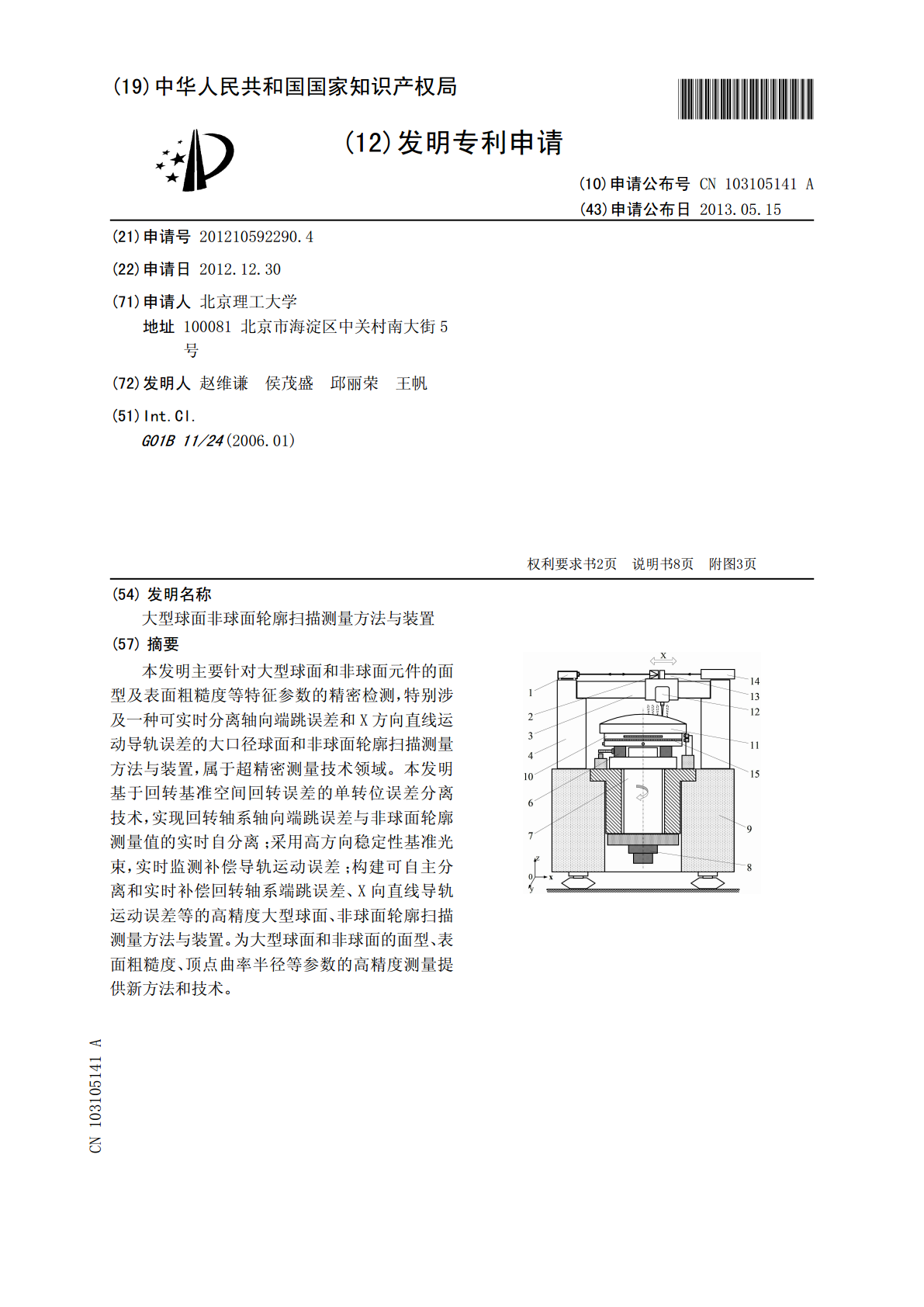
本发明主要针对大型球面和非球面元件的面型及表面粗糙度等特征参数的精密检测,特别涉及一种可实时分离轴向端跳误差和X方向直线运动导轨误差的大口径球面和非球面轮廓扫描测量方法与装置,属于超精密测量技术领域。本发明基于回转基准空间回转误差的单转位误差分离技术,实现回转轴系轴向端跳误差与非球面轮廓测量值的实时自分离;采用高方向稳定性基准光束,实时监测补偿导轨运动误差;构建可自主分离和实时补偿回转轴系端跳误差、X向直线导轨运动误差等的高精度大型球面、非球面轮廓扫描测量方法与装置。为大型球面和非球面的面型、表面粗糙度、

大口径非球面工件轮廓的测量方法.pdf
大口径非球面工件轮廓的测量方法,涉及一种非球面工件的测量。将等分的N段轮廓测量数据建立各自的局部坐标系,取L1段测量轮廓上的m个重叠测点进行最小二乘线性拟合得到轮廓特征线P1,再取L2段前端的m个重叠测点,同样利用最小二乘线性拟合得到轮廓特征线P21,然后以L1段轮廓所建坐标系为参考坐标系,对轮廓特征线P21进行坐标变换至与轮廓特征线P1重合,完成L1和L2段拼接。同理,可获得其他相邻两段测量轮廓的两两拼接,完成N段轮廓的拼接测量,并对拼接得到的完整工件轮廓曲线进行去倾斜处理,最终得到完整的工件表面轮廓特

一种大梯度非球面的轮廓测量方法.pdf
本发明公开了一种大梯度非球面的轮廓测量方法,其特征在于:设置一旋转平台,测头的起伏运动方向与旋转平台的旋转中心轴垂直设置,测量方法包括下列步骤:(1)测量测头零点位置与旋转中心轴的距离;(2)求出非球面的最接近球面半径;(3)将待测非球面工件垂直放置于旋转平台上,使非球面工件的最接近球面的球心位于旋转平台的旋转中心轴上;(4)使测头与非球面接触,匀速转动旋转平台,测量获得待测非球面工件表面与最接近球面的偏离量分布,经计算获得非球面轮廓矢高。本发明通过测量非球面与其最接近球面的偏离量,来测量非球面,大大减小

大型非球面轮廓检测技术的比对研究的任务书.docx
大型非球面轮廓检测技术的比对研究的任务书任务书一、背景目前,大型非球面轮廓的检测技术已被广泛应用于海洋、地球和航空领域,如鱼类数量统计、地形测绘以及飞机翼型检测等方面。然而,目前对于大型非球面物体的检测技术存在一些问题,例如照明条件、物体表面不规则性以及复杂纹理等,目前的技术往往面临一定的困难。因此,有必要对现有的大型非球面轮廓检测技术进行比对研究,以找到更适合于实际应用的技术。二、任务目标本次任务的目标是对现有的大型非球面轮廓检测技术进行比对研究,包括以下内容:1.对目前流行的大型非球面轮廓检测技术进行
非球面轮廓测量与分析.ppt
非球面轮廓测量与分析主要内容非球面简介概况什么是非球面?为何需要非球面?使色差最小有效减少光学系统中的透镜个数降低光学系统的重量降低总成本专门的设计可以产生2个或更多的焦点(例如DVD透镜)非球面的典型应用大多数非球面是基于一个“二次”或者“锥面”项,基本的方程如下:标准的基本形式为:球面(k=0)抛物面(k=-1)双曲面(k<-1)椭圆(-1<k<0)K为圆锥常数(ConicConstant),也称为二次常数.圆锥常数(Conicconstant)之所以称为“锥面”项,是由于我们可以用不同方位的面与圆锥