
一种腱式欠驱动自适应多指手装置.pdf

王秋****哥哥

1/9

2/9

3/9

4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种腱式欠驱动自适应多指手装置.pdf
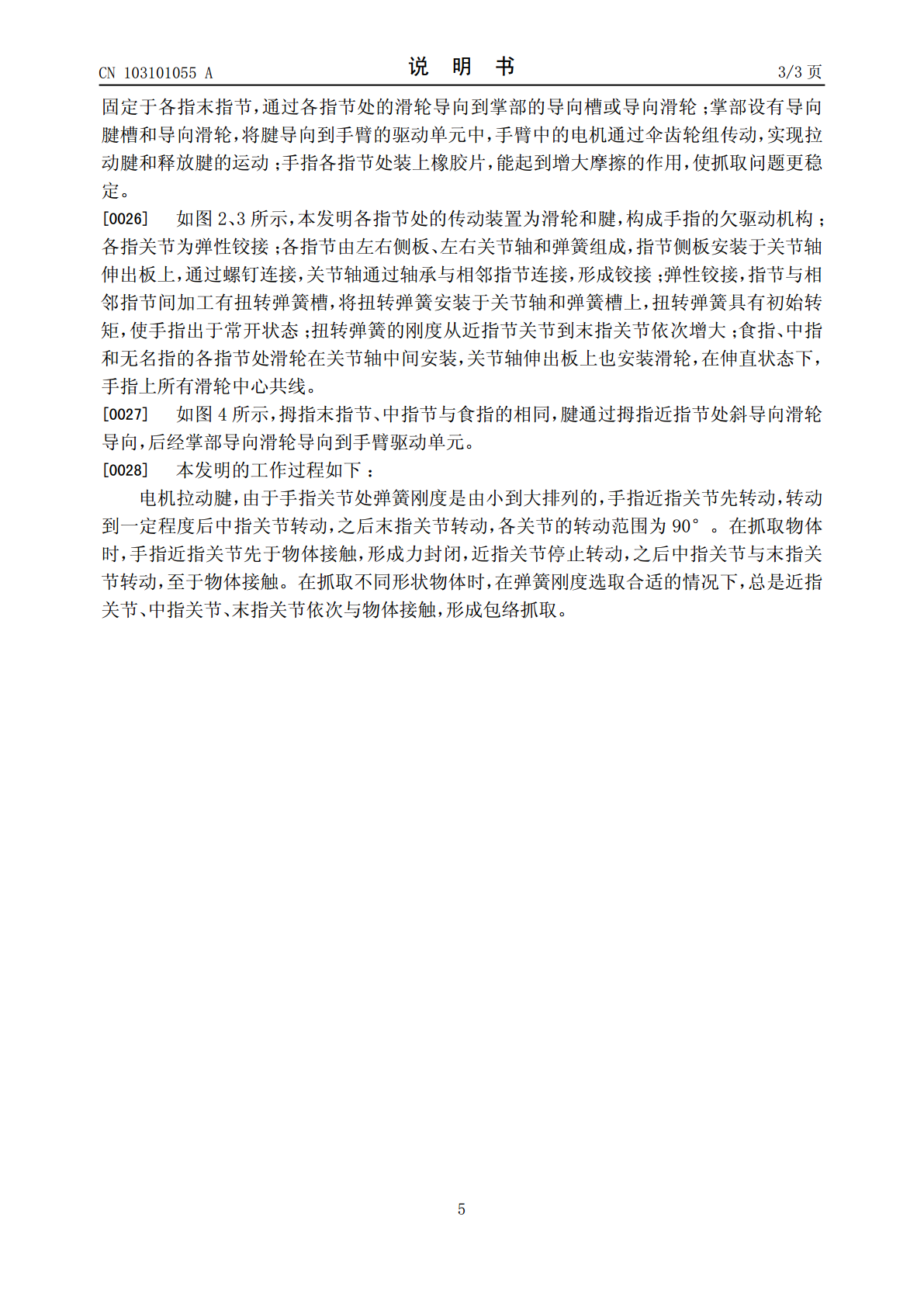
腱式欠驱动自适应多指手装置,属于拟人机器人技术领域。本发明食指(2)、中指(3)、无名指(4)的驱动机构相同,尺寸不同;拇指(1)的驱动原理与各指相同,设计了能模拟人手拇指运动的机构;腱(37)固定于各指末指节,通过指节上滑轮导向(32);各指关节安装有左右两个扭转弹簧;各指的一端固定连接于掌部(6);掌部设有腱槽和导向滑轮(7),将腱导向到手臂的驱动单元中;每个指节上装有橡胶片(5)。本发明驱动器少,每个手指只需要一个电机驱动,结构简单,控制难度低,可实现对物体的自适应包络抓取。

一种自适应绳驱式欠驱动三指机械手.pdf
本发明为一种自适应绳驱式欠驱动三指机械手,包括手掌、手指组件、机械手腕,所述手指组件由结构相同的1个第一固定手指和2个第二转动手指组成,所述第一固定手指的底部固定在所述手掌上,所述第二转动手指与固定在所述手掌中心、并能使所述第二转动手指沿手掌中轴线水平转动的齿轮转动机构相连。本发明性能稳定可靠、结构紧凑、实用、灵活,可与工业机器人进行高效配合,提高工业生产的自动化程度。
一种欠驱动自适应多指灵巧手控制系统.pdf
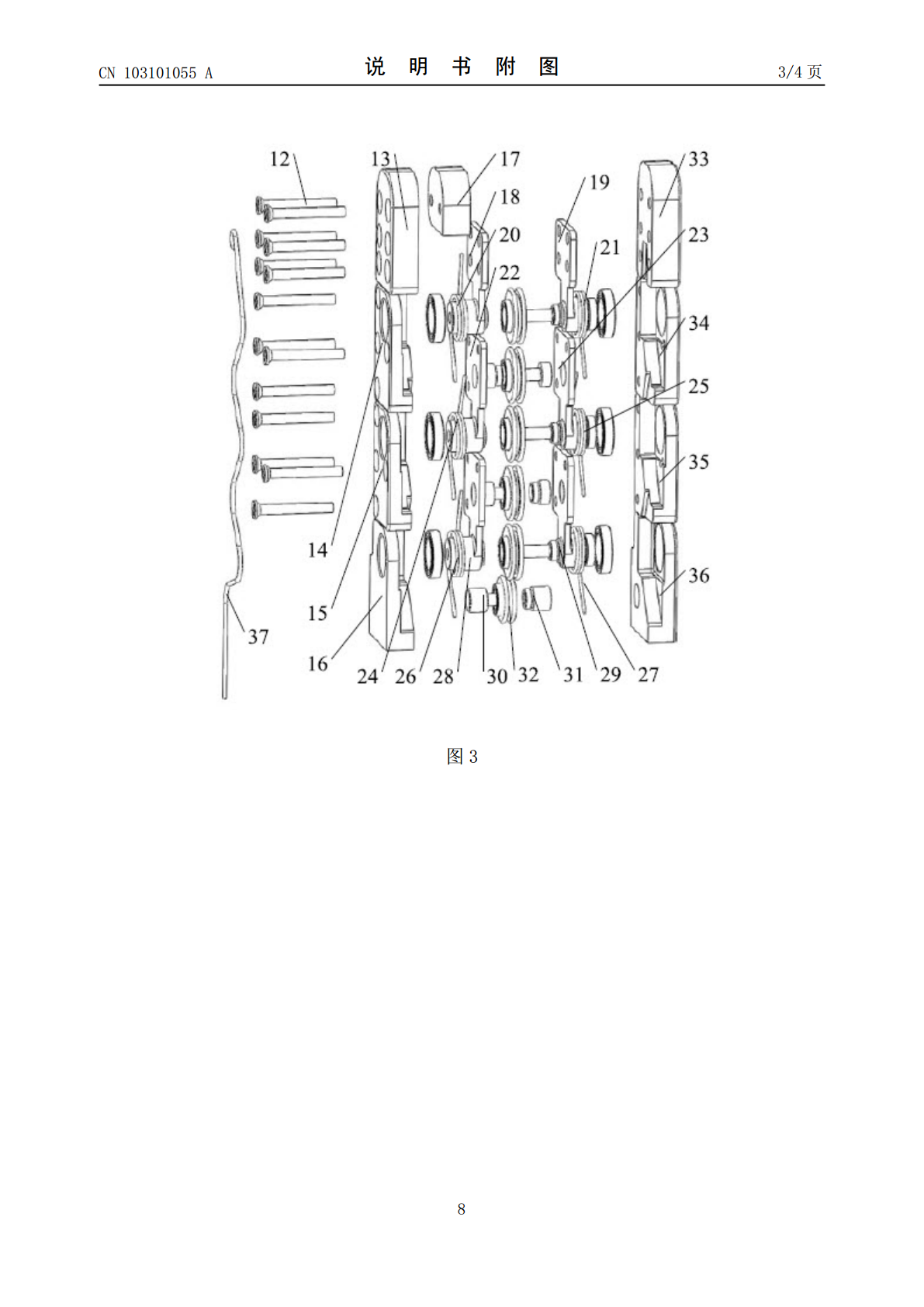
本发明涉及一种欠驱动自适应多指灵巧手控制系统,属于拟人机器人技术领域。该控制系统包括有上位机,传感系统和控制器等部分。控制器接收来自上位机的信号,并根据所接收的信号对直流伺服电机驱动芯片发出控制信号。直流伺服电机驱动芯片接收控制信号,并驱动直流伺服电机单元按照控制要求驱动欠驱动自适应多指灵巧手机械本体的运动,通过控制其每一只手指伸与缩,完成抓取物体和自动放松的功能,同时传感系统可在抓取过程中对手指接触压力值采样并反馈。控制系统通过采用先进的控制算法,可以自动地校正实时误差和提供保护机制。本发明中控制系统其
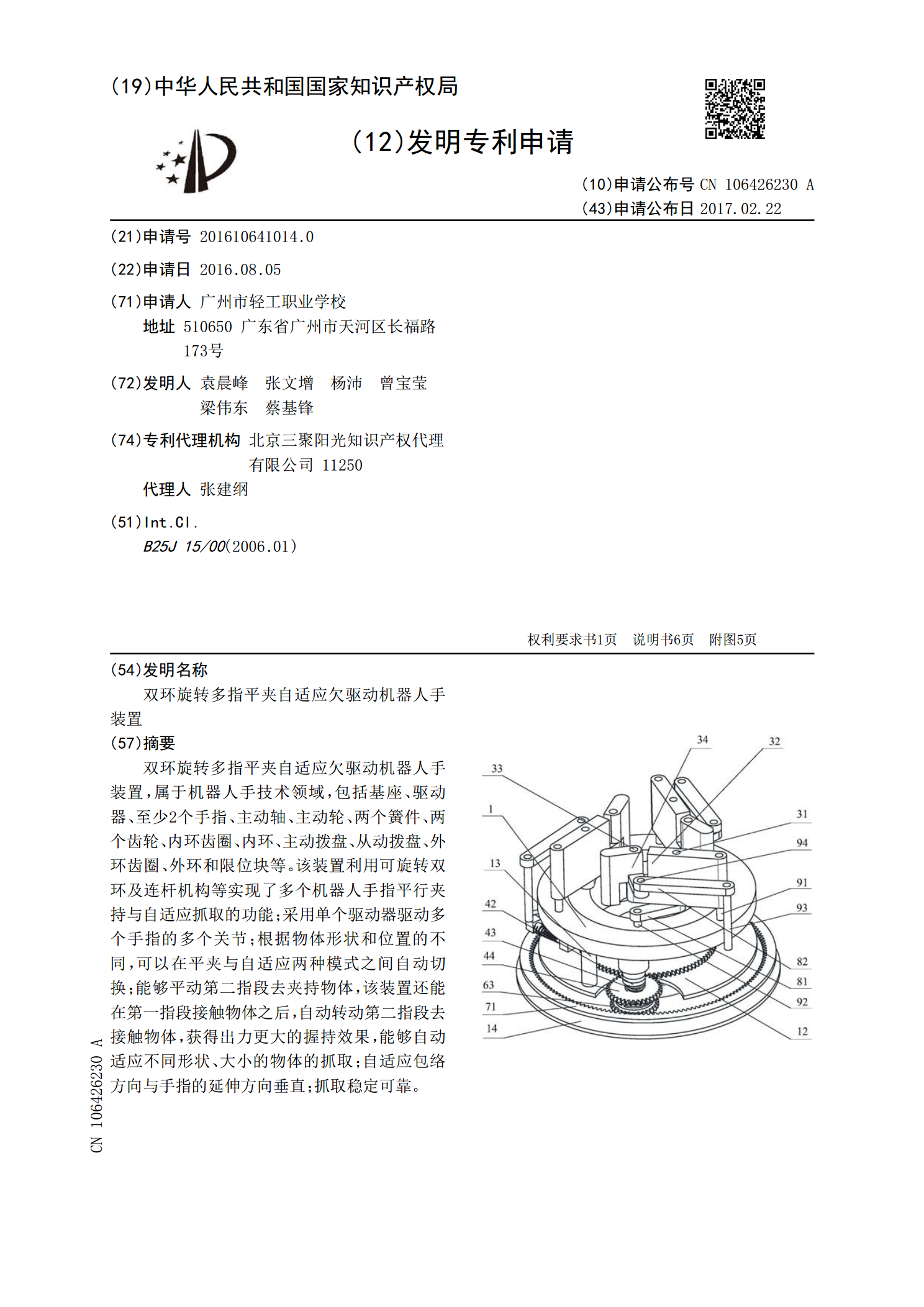
双环旋转多指平夹自适应欠驱动机器人手装置.pdf
双环旋转多指平夹自适应欠驱动机器人手装置,属于机器人手技术领域,包括基座、驱动器、至少2个手指、主动轴、主动轮、两个簧件、两个齿轮、内环齿圈、内环、主动拨盘、从动拨盘、外环齿圈、外环和限位块等。该装置利用可旋转双环及连杆机构等实现了多个机器人手指平行夹持与自适应抓取的功能;采用单个驱动器驱动多个手指的多个关节;根据物体形状和位置的不同,可以在平夹与自适应两种模式之间自动切换;能够平动第二指段去夹持物体,该装置还能在第一指段接触物体之后,自动转动第二指段去接触物体,获得出力更大的握持效果,能够自动适应不同形

一种具有形状自适应的三指欠驱动机械手.pdf
本发明公开了一种具有形状自适应的三指欠驱动机械手,涉及工业机器人领域,包括底盘、基座、第一手指、第二手指和第三手指;其中,第一手指、第二手指和第三手指是结构完全相同的欠驱动手指,包括驱动电机、蜗杆、手指基座、第一销轴、第一轴承、蜗轮、第二轴承、第二销轴、第二指骨、第三销轴、压缩管、第四销轴和第一指骨;三指欠驱动机械手采用蜗轮蜗杆传动机构。本发明是一种具有形状自适应的三指欠驱动机械手,具有结构紧凑、控制简易、自锁能力强的特点,能被动自适应物体的大小,稳定抓取不同的物体,特别适合用于工业机器人末端的执行装置。